
Fターム[5H004HA07]の内容
フィードバック制御一般 (10,654) | 制御量の種類 (1,038) | 変位、角度、位置、方向、姿勢 (358)
Fターム[5H004HA07]に分類される特許
41 - 60 / 358
PWM制御により双方向サーボアクチュエータを制御するためのシステム、方法、及び装置

【課題】タービンに多数の弁がある場合、タービンのサーボコントローラは、極めてかさばったものとなる可能性があるとともに、駆動エネルギーが線形駆動回路を通じて熱に変換される場合には、エネルギー効率が低下し、制御盤の全体的な温度を上げるのを解決する。
【解決手段】方向制御信号を受信するステップと、少なくとも方向制御信号に基づいてアクチュエータを通るスイッチング可能な正電流経路及びスイッチング可能な負電流経路を確立するようにデバイスを操作するステップと、アクチュエータに関連付けられた電流に少なくとも基づいてフィードバックを送るステップと、そのフィードバックに少なくとも基づいて電流を制御するステップとを含むことができる。この方法は、パルス幅変調制御を介してアクチュエータを通る少なくとも1つの正電流経路及び少なくとも1つの負電流経路を確立するように1つ又は複数のデバイスを操作するステップを含む。
(もっと読む)
双方向ヒステリシス制御を使用してアクチュエータ駆動電流を制御するためのシステム、方法、及び装置

【課題】駆動用アクチュエータが発生する熱をPWM制御を行うことにより少なくし、ヒートシンクを小さくできる方法を提供する。
【解決手段】アクチュエータ駆動電流を制御するためのは、基準信号を受信するステップと、駆動電流に少なくとも部分的に基づいてフィードバック信号を決定するステップと、フィードバック信号に少なくとも部分的に基づいて調整されたフィードバック信号を決定するステップと、基準信号と調整されたフィードバック信号とを比較するステップと、基準信号と調整されたフィードバック信号との比較結果に基づいて駆動電流を制御するステップとを含む。またヒステリシス制御を介してアクチュエータ内を通る少なくとも1つの正電流経路及び少なくとも1つの負電流経路を確立するように1つ又は複数のデバイスを操作するステップを含む。
(もっと読む)
多変数制御装置
【課題】制御プロセスの一部分として操作値軌跡を生成するために、モデル予測制御モデル(MPC)を使用し、被制御システムのシステムモデルの反復有限区間最適化を決定する1つまたは複数の物理的構成要素を有する被制御システムの予測モデル制御の方法およびシステムを提供する。
【解決手段】時間tにおいて被制御システム100の現在の状態をサンプリングし、操作変数MV軌跡を最小化する費用関数が将来の比較的短い時間区間の間にMPCモデルを用いて計算され、MPCは最適解を見つけるために二次計画(QP)アルゴリズムを使用し、QPアルゴリズムは、勾配射影に基づいておよびニュートンステップ射影を使用して、単純制約を有するアクティブセットソルバクラスアルゴリズムを使用して解かれる。操作値軌跡の移動が実行され、制御プロセスは、予測区間を前にシフトし続けることにより前に移動される。
(もっと読む)
Hブリッジをヒステリシス制御とともに使用して双方向サーボアクチュエータを制御するためのシステム、方法、及び装置
【課題】駆動エネルギーが線形駆動回路を通じて熱に変換される場合、回路のエネルギー効率が低下し、放散される熱が制御盤の全体的な温度を上げるのを防止する。
【解決手段】方向制御信号を受信するステップと、方向制御信号に少なくとも部分的に基づいてアクチュエータを通る少なくとも1つのスイッチング可能な正電流経路及び少なくとも1つのスイッチング可能な負電流経路を確立するようにデバイスを操作するステップと、アクチュエータに関連付けられた電流に少なくとも基づいてフィードバックを送るステップと、そのフィードバックに少なくとも部分的に基づいて電流を制御するステップとを含むことができる。ヒステリシス制御を介してアクチュエータを通る少なくとも1つの正電流経路及び少なくとも1つの負電流経路を確立するように1つ又は複数のデバイスを操作するステップを含むことができる。
(もっと読む)
高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置
【課題】高効率サーボアクチュエータ及び励磁ドライバを実現するためのシステム、方法、及び装置を提供すること。
【解決手段】本発明の例示的な一実施形態によれば、アクチュエータ(216)を制御するための方法が提供される。この方法は、基準信号(204)を生成するステップと、基準信号(204)に少なくとも部分的に基づいてスイッチト駆動信号(207)によりアクチュエータ(216)を操作するステップと、スイッチト励磁信号(228)を生成するステップと、スイッチト励磁信号(228)に関連付けられたフィードバック(236)に少なくとも部分的に基づいて基準信号(204)を制御するステップとを含むことができる。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
ボールねじ装置の駆動制御装置及び駆動制御方法
【課題】 ボールねじ装置の共振を良好に抑制する。
【解決手段】 ボールねじ装置は、ボールねじを回転させて移動体を移動させるためのモータ11を備えている。モータ11は、駆動制御装置により駆動制御される。駆動制御装置は、ボールねじの長さに応じてボールねじの長さに固有のボールねじ装置の共振周波数を決定する共振周波数決定部33と、モータ11を駆動制御するための駆動制御信号から決定された共振周波数に対応した周波数成分を除去するフィルタ部37とを備えている。
(もっと読む)
波動歯車減速機の温度変化に伴う摩擦特性変動を考慮したアクチュエータの適応型摩擦補償法
【課題】温度センサを用いずに温度変化に伴う波動歯車減速機の摩擦特性変動下における制御性能の向上を達成可能なアクチュエータの適用型摩擦補償方法を提案すること。
【解決手段】波動歯車減速機1を備えたアクチュエータ2の適応型摩擦補償法では、モータ駆動電流に印加する摩擦補償電流として、モータ軸6が偏差を持って静止した際には静止摩擦補償電流isを採用し、それ以外の場合にはクーロン摩擦補償電流icを採用する。静止摩擦補償電流isはステップ関数の補償量issに単調増加なランプ関数の補償量isrを加えたものであり、クーロン摩擦補償電流icとしてステップ関数の補償量icsを用いる。位置決め制御の応答中のデータに基づき摩擦補償量を適応的に変化させることができるので、周囲温度が変化して波動歯車減速機1の摩擦特性が変動しても、モータ軸6を大きな振動を伴うことなく目標角度に整定可能である。
(もっと読む)
制御スケジューリング・システム及び方法
【課題】異なった制御モード間で円滑な変更を行う。
【解決手段】装置の第1の作動モードと第2の作動モードとの間で装置の制御を変更するシステムにおいて、装置を第1の作動モードで制御するための制御信号を生成するための第1の作動モードと関連した利得係数を利用し、且つ装置を第2の作動モードで制御するための制御信号を生成するための第2の作動モードと関連した利得係数を利用する制御ループと、装置が第1の作動モードから第2の作動モードに移行するとほぼ同時に第2の作動モードと関連した利得係数を用いて制御ループを動作させる利得セレクタと、モードの変化中に、制御信号における突然の変化を最小化するスムーザとを備える、システム。
(もっと読む)
軌道追従制御装置、方法及びプログラム
【課題】制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現する。
【解決手段】スライディング制御の式の中で登場する定数λの値をfとする。また、定数λの値を、制御対象物の状態変数X(t)(例えば位置)、制御対象物の目標とする状態Xd(t)(例えば目標位置)を用いて制御対象物の目標とする状態の一階微分(例えば目標速度DXd(t)/Dt)に応じて適宜修正する。これにより、スライティング制御の式の中で登場する制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)の項を消すことができ、制御対象物の状態変数の一階微分(例えば速度DX(t)/Dt)を計測及びフィードバックすることなく、スライディング制御を実現することができる。
(もっと読む)
較正方法、較正システム、およびこの較正方法のための記録媒体
【課題】 単純かつ短時間に、物理システムの状態変数のオブザーバの係数を較正する方法を提供する。
【解決手段】 この方法は、状態変数xkの関数である物理システムの変数zkを、相異なるN個の測定時刻において測定するステップ(50)と、あらかじめ定められた制約セットΔを満たしながら、基準式を最小にする係数ベクトルpを特定するステップ(54)とを含んでいる。この基準式は、変数zkと、変数zkの推定値に状態変数xkの推定値をリンクさせる既知関数との差のノルムによって構成されている。制約セットΔの1つまたは複数の制約は、変数zkの軌跡が、測定時刻kの少なくとも大部分において、変数zkの推定値の軌跡の両側に配置された、帯状の不確かさの領域の内部に存在しなければならないということを命ずる。
(もっと読む)
モータの制御方法及び装置
【課題】 モータの出力をできるだけ大きなトルクで減速し、しかも、位置決め時のオーバーシュートが小さく、高速に位置決めできる定位置停止制御装置を実現する。
【解決手段】 モータMの回転子の回転速度がオリエンテーション速度になった後、制御部7は、位置ループ速度指令vcにより指令された速度と2乗速度v2との偏差を速度制御器4に与える。速度制御器4から出力されたトルク指令tcに、制御部7が決定したトルク加算指令acを加算部ADで加算して得た加算トルク指令atcをトルク制御器6に与える。オリエンテーション制御に用いる物理変数を用いて定めたスライディングカーブに沿って回転子の位置及び速度を制御することにより、回転子を目標位置に停止させるスライディングモード制御によりトルク制御器の入力を調整する。
(もっと読む)
制御装置
【課題】より簡単な構成で目標入力に対し確実に追従可能な制御装置を提供する。
【解決手段】目標値rzと制御対象11の出力とに基づく第1操作量を制御対象11に与えるフィードバック制御器21と、目標値rzに基づく第2操作量を制御対象11に与えるフィードフォワード制御器31とを備え、j型(jは1以上の正整数)の制御系を生成する場合に、フィードフォワード制御器31が、目標値rzから前記制御対象11の出力と目標値rzの偏差までの伝達関数の分子の(j−1)次項以下の各項の係数をそれぞれゼロとするような制御要素を有している制御装置を提供する。
(もっと読む)
モータ制御装置
【課題】 モデル制御系のパラメータを簡単に調整でき、しかも、モデル速度制御器から出力されるトルク指令が過大になることがなく、より高速で振動のない位置決めを実現できるモータ制御装置を提供する。
【解決手段】 モデル制御系1は、モータについての第1の慣性系の機械モデルと、負荷についての第2の慣性系の機械モデルと、モータと負荷との間のねじりトルクについてのねじりトルクモデルと、フィードバック加速度指令S10をモデルトルク指令部8にフィードバックする第1の状態フィードバック系と、フィードバック速度指令S5をモデル速度指令部5に状態フィードバックする第2の状態フィードバック系とを備えている。モデル制御系の状態方程式から得られる特性方程式が4重根を持つように演算して得たパラメータの関係式に基づいて、モデル制御系のパラメータが定められている。
(もっと読む)
能動適応ジャイロスタビライザー制御システム
歳差情報だけに基づいて海洋船舶の運動を安定化するためのジャイロスタビライザー制御システム及び方法。制御システムは自動利得制御(AGC)歳差コントローラ(60)を用いる。システムはジャイロフライホイール(12)に可能な限り大きな歳差−歳差が大きくなるほど、ロール安定化モーメントが大きくなる−を発現させるように、常に漸進的に最小化される利得因子を用いて動作する。この連続利得変化により、海況及び航行状態の変化への適応が与えられる。システムは最大歳差に到達する確度を有効に予測する。このイベントが検出されると、制動歳差トルクを与えるため、利得が急速に高められる。イベントが過ぎてしまうと、システムは再び利得を漸進的に低下させようとする。 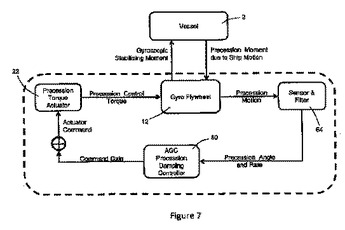 (もっと読む)
(もっと読む)
制御装置、移動体、制御方法、及びプログラム
【課題】複数のフィードバック補償器を有し、これらを順次切り換える制御系において、切り換え時の過渡応答の特性を向上させるようにする。
【解決手段】切換以降の過渡応答、制御入力の振幅、制御入力の差分値、及び切換直前と直後の制御入力の差分値を抑制する評価関数を設計し、この評価関数を最小化する倒立2輪走行用フィードバック補償器60の状態ベクトルの初期値を与える。これによって、制御切換後の過渡応答や、制御入力の振幅、不連続性を向上させることができる。
(もっと読む)
位置制御装置
【課題】位置検出にインクリメンタルタイプのパルスエンコーダを使用すると、低速領域ではパルスが発生しなくなるため、低速領域では大きな速度変動が発生する。
【解決手段】位置制御装置のマイナーループに速度制御を持たない位置制御とし、
この位置制御部をPID制御器とし、入力θrefと出力θdet比のPID制御器の伝達関数を次式で求めた後、位置制御部のパラメータKPθ、KIθ、KDθを求めたものである。
θdet/θref=(KDθs2+KPθs+KIθ)/{Jdys3+(KDθ+Ddy)s2+KPθs+KIθ}
(ただし、KPθは比例要素、KIθは積分要素、KDθは微分要素、Jdyはモータ慣性、Ddyは回転損失、sはラプラス演算子)
(もっと読む)
位置制御装置
【課題】速度制御系をマイナーループに、位置制御をメジャーループに持つ位置制御では、高応答にするための調整が困難となっている。
【解決手段】位置制御部にフィードフォワード部を設ける。位置制御部に入力されるステップ状の角度指令θrefと制御対象物の角度検出θdetから比の伝達関数を次式で求める。
θdet/θref={KIω(FFθ+KPθ)}/{Jdys3+(KPω+Ddy)
s2+KIωs+(KIω*KPθ)}
フィードフォワード部のパラメータFFθを、上式の分子多項式の零点=分母多項式の定数項としてKIω(FFθ+KPθ)=KIω*KPθからFFθ=0
として求める。
(ただし、KPθは位置制御部の比例パラメータ、KPω,KIωは速度制御部の比例及び積分パラメータ、Jdyはモータ慣性、Ddyは回転損失s)
(もっと読む)
電動機制御装置
【課題】実操業時に速度パターンや負荷等が変動する場合にも、制御パラメータを常に最適値に調整可能として安定した制御応答が得られるような電動機制御装置を提供する。
【解決手段】電動機の状態量に関する加減速パターン等の指令パターンを出力する自動運転指令生成部4と、前記状態量をフィードバックして前記指令パターンに追従させるように制御する位置・速度調節部5と、前記状態量に基づいて調節部5における制御パラメータを変更する制御パラメータ操作部33と、を備え、電動機により負荷機械を駆動しながらパラメータ操作部33により制御パラメータを最適値に調整する電動機制御装置において、負荷機械の状態に応じて前記指令パターンを変化させる。
(もっと読む)
ロボットの制御装置
【課題】関節に連結されたリンクを揺動させるロボットの制御装置であり、可動範囲の境界付近でのオーバーシュートを抑制するとともに、可動範囲の境界付近以外では応答速度を向上させることのできるロボット制御装置を提供する。
【解決手段】ロボット制御装置は、センサによって計測された計測関節角を目標関節角に追従させるフィードバック制御器と、フィードバック制御器とロボットの機構系によって構成される閉ループ系の特性多項式の根を変更する極配置器を備えている。その極配置器は、予め定められた関節の可動範囲を、可動範囲の境界を含まない第1可動許容範囲と、第1可動許容範囲の外側に設定された第2可動許容範囲とに区分して記憶している。また極配置器は、計測関節角が第1可動許容範囲内に存する場合は前記特性多項式に複素根を設定し、計測関節角が第2可動許容範囲内に存する場合は前記特性多項式に実根を設定する。
(もっと読む)
41 - 60 / 358
[ Back to top ]