
Fターム[5H004JA03]の内容
フィードバック制御一般 (10,654) | 設定部 (547) | 設定値が変化するもの (335)
Fターム[5H004JA03]の下位に属するFターム
設定値がプログラムされているもの (36)
Fターム[5H004JA03]に分類される特許
61 - 80 / 299
半導体装置および撮像装置

【課題】低コスト化を図るとともに、駆動電流制御の精度の向上を図ることが可能な半導体装置および撮像装置を提供する。
【解決手段】半導体集積回路101は、駆動電流値を示す複数ビットの駆動データのうち、最上位ビットまたは最上位ビットから連続する複数のビットである上位データに基づいて第1の駆動電流を生成し、負荷に供給する第1の駆動電流生成部21Aと、駆動データのうち、最下位ビットまたは最下位ビットから連続する複数のビットであり、かつ少なくとも駆動データのうちの上位データ以外のすべてのデータを含む下位データに基づいて第2の駆動電流を生成し、負荷に供給する第2の駆動電流生成部21Bとを備える。
(もっと読む)
車両用速度制御システム
本発明は、予め設定された目標速度域内で燃費を指向しながら車速を制御するための、燃費指向の速度制御モードを起動するための操作ユニットと、前記燃費指向の速度制御が起動状態にあるときに、予め設定された最大エネルギ消費値に配慮しながら、前記予め設定された目標速度域内で車速を制御するようになっている、制御ユニットとを備えた、車両用の速度制御システムに関する。その際に車速は、前記予め設定された目標速度域内に位置する車速に調整することが可能である限りは、前記予め設定された最大エネルギ消費値を上回ることがないように、前記予め設定された最大エネルギ消費値に配慮しながら制御される。 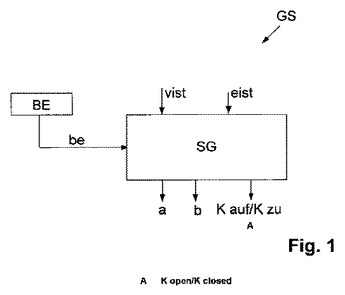 (もっと読む)
(もっと読む)
指令補間方法

【課題】従来の指令補間方法は、制御実施期間が指令更新周期と等しく設定されているので、指令値の入力に遅れが生じた場合に制御停止期間が生じる。
【解決手段】本発明による指令補間方法は、制御周期121に補間値算出数を乗算した制御実施期間120が指令更新周期110よりも長く設定されており、第2指令値102が入力されたときから前記指令更新周期110が経過した際にも、第2指令値102と該第2指令値102の前に入力された第1指令値101とに基づく制御が行われる構成である。
(もっと読む)
車両の駆動力制御装置
【課題】未来の運転者操作量(換言すれば運転負担)と未来の燃料消費量を予測し、状況の変化に応じてそれらを同時に最小化あるいは最適化することを可能とするようにした車両の駆動力制御装置を提供する。
【解決手段】エンジンでフューエルカットが実行されるときと否とに分けてモデリングされると共に、状態方程式で記述された、エンジンから車体までを制御対象として変速比とエンジン回転数を車速に基づいて算出される代表目標変速比と燃費最適作動線に従って算出される目標エンジン回転数にフィードバック制御する変速比制御系とを備え、アクセルペダル開度とブレーキペダル開度の現時刻からnステップ未来までの運転者操作量の総和を評価する運転者操作量評価関数などに従って状態xの変化が最適となるように予めオフラインで生成された最適解群を検索して代表変速比を修正し、操作量として制御対象に加える。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
ステージ装置、露光装置、及びステージ制御方法
【課題】ステージを駆動する際に生じる振動を効果的に抑制する。
【解決手段】所定タイミングで検出された制御対象301の位置と所定位置との誤差を、前記タイミングからの時間経過に応じてフィードフォワード制御部102による操作量を変更することによって補正するとともに、フィードバック制御部103への外部入力をフィードフォワード制御部102による補正量に応じて変更する制御部104を備える。
(もっと読む)
プラントの制御装置
【課題】 偏差に基づく補償動作の遅れを補い、目標値の変動に遅れなく追従し、応答性を向上させる。
【解決手段】 設定された目標値と制御量との偏差に基づいて、フィードバック制御するプラントの制御装置30であって、バルブ13に入力されるバルブ開度Vと制御対象から出力される流量fとの入出力特性をあらかじめ記憶し、この入出力特性に基づき、目標値に対応するバルブ開度Vを特定するとともに、目標値が変動するタイミングにおいて、変動する目標値から特定されるバルブ開度Vをバルブ13に入力するフィードフォワード制御手段と、を備える構成としてある。
(もっと読む)
移動体の入力決定手段、及びその手段を有するハイブリッド車両と多関節移動ロボット
【課題】将来状態の予測が困難なハイブリッド車両や移動ロボットでも、最適制御問題を解いて特定動作における損失の最小化を図る。
【解決手段】入力決定手段15は外部入力11と出力12とを入力とし、内部入力16を生成する。移動体10は冗長性を持ち、ある外部入力11に対応する出力12を生成する方法が複数個あるものを対象とする。内部入力16は入力決定手段15により、予め決められた評価関数を最小または最大になるように決定される。入力決定手段15は将来状態予測手段21、最適化演算手段22、制約条件判定手段23を有する。最適化演算結果通知手段27は最適化演算で得られた解が実行不可能な場合そのことを外部に通知するために設けたものであり、LED、液晶表示、メモリなどとして実現される。これは開発時のデバッグを容易にするのみならず、オフライン診断としても使用する。
(もっと読む)
サーボ装置
【課題】サーボ装置で駆動される模型飛行機の引込み脚を、停止位置に保持電流を消費せずに維持できるようにする。
【解決手段】サーボ装置10は、出力軸の目標位置信号と、サーボモータ16から得られる出力軸の現在位置信号等との誤差を増幅手段21で増幅し、PWM 波形としてモータに与え、誤差が小さくなる方向にモータを駆動する。不感帯設定手段23は、誤差がフィードバック制御によって修正すべき大きさか否かを判断する基準値を設定する。モータ停止と判断された場合、不感帯は通常の0.4 °から10°に変更される。モータが停止すると外力が加わってもサーボ装置には停止位置で外力に対する保持電流は流れず、電力の無駄な消費が抑えられる。
(もっと読む)
調節計
【課題】簡易にして迅速にかつ確実にパラメータを設定をすることができ、パラメータを設定する際のユーザの操作負担を低減することができる調節計を提供する。
【解決手段】調節計は、メモリバンク(30)内の所定の遷移経路に従い複数の設定表示画面(32)を選択的に切り換えて表示する表示画面切換手段(6)と、キー入力操作により、パラメータごとに付されたガイド番号を入力及び表示するためのガイド番号表示画面(33)を表示器(20)に表示するガイド番号表示手段と、キー入力操作により、ガイド番号表示画面にてガイド番号を入力するためのガイド番号入力手段とを具備し、表示画面切換手段は、ガイド番号入力手段によってガイド番号をガイド番号表示画面に入力することにより所定の設定表示画面(32)を前記所定の遷移経路によらないで直接に表示する。
(もっと読む)
制御機器および制御方法
【課題】通常時は操作量の急変を抑制し、外乱抑制時などの緊急時には必要とされる操作量の急変を抑制しないようにする。
【解決手段】制御機器は、外部から入力された制御量目標値SPnの変化率の変化率を上限値と下限値の範囲内に制限する上下限処理を行い、上下限処理後の制御量目標値SPn’を算出する目標値変化量変化量制限部3と、算出された制御量目標値SPn’と制御量PVとの偏差に基づいて操作量MVを算出して制御対象に出力するPID制御演算部4とを備える。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
制御パラメータ調整方法および制御パラメータ調整プログラム
【課題】一組の試験データから直接に制御パラメータを決定できるようにする。
【解決手段】制御対象11に開ループで操作量u(t)を与えて制御する制御装置12の伝達関数C(x)を決定する制御パラメータxを、目標値r(t)に対する制御対象11の制御量y(t)の応答が参照モデルMに近づくように調整する際に、制御対象に時刻とともに変化するテスト入力信号列u1(t)を与えて制御量の時間変化であるテスト出力信号列y1(t)を採取し、誤差‖Mr(t)−PC(x)r(t)‖を変形した評価関数Jを最小にするように制御パラメータxを決定する。評価関数Jは、y1(t)=Pu1(t)に注意すると、未知の制御パラメータxで表される制御装置12の伝達関数C(x)と、既知の伝達関数M、テスト入力信号列u1(t)およびテスト出力信号列y1(t)とで表されて、J=‖Mu1(t)−C(x)y1(t)‖となる。
(もっと読む)
プラント運転支援装置
【課題】実プロセスに試験操作を与えることなくプロセス制御装置に適切な制御パラメータを求め、求めた制御パラメータを実プロセスに反映させることができるプラント運転支援装置を実現すること。
【解決手段】実プラントからオンラインで実測データを収集してその内部モデルを更新することにより高精度のシミュレーション結果を得るオンラインシミュレータと、制御性能確認部と制御パラメータ解析部を含む解析部と、これら実プラントおよび解析部に対する操作設定を行う操作設定インタフェースとを備え、
前記解析部は前記オンラインシミュレータから状態変数の値を受け取り試験操作を行ってプロセスの応答を得ることにより前記実プラントに適切な制御パラメータを求め、これら求めた制御パラメータを前記操作設定インタフェースを介して前記実プラントに反映させることを特徴とするもの。
(もっと読む)
プラント運転支援装置
【課題】動特性に影響を及ぼすパラメータであっても、プラント全体のバランスを考慮して調整できるプラント運転支援装置を実現すること。
【解決手段】オンラインシミュレータを用いたプラント運転支援装置において、実プラントの実測データに基づきオンラインでパラメータ調整を行いながらトラッキングモデルを生成するトラッキングモデル部と、このトラッキングモデルに基づき予測データを生成する予測モデル部と、生成された予測データと前記実測データを格納する予実データ記憶部とを備え、前記トラッキングモデル部は前記予実データ記憶部に格納されている予測データと実測データの差が最小になるようにパラメータを調整するとともにトラッキングモデルを更新することを特徴とするもの。
(もっと読む)
電気機器の運転制御装置
【課題】停電中においても制御部の時計機能を長時間にわたって有効な状態に維持できるため停電からの復帰時にも停電前と略同様な運転制御を行え、しかも低コストに実施可能な電気機器、例えば貯湯式給湯機の運転制御装置を提供する。
【解決手段】交流電源1にスイッチング電源2を介して接続された制御部10を有する貯湯式給湯機の運転制御装置である。停電検出手段20を備え、また、制御部10とは並列にバックアップコンデンサ28を接続する。上記停電検出手段20は、停電時のスイッチング電源2のコンデンサの放電が終了する前の段階で停電検出信号を出力可能に構成する。そして、停電検出信号が出力されたときに制御部10がスタンバイモードへと移行する。スイッチング電源2のコンデンサ放電の後は上記バックアップコンデンサ28から制御部10へと給電を行う。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】搬送アクチュエータの振動を抑制すると共に、各駆動軸の回転動作が他の駆動軸に与える影響を低減する。
【解決手段】右搬送アクチュエータ32が伸縮動作する場合、中央制御装置10の制御部12は、縮み位置から伸び位置へ移動させるための位置指令を右搬送アクチュエータ制御装置30に出力し、現状を維持するための0°の位置指令を旋回アクチュエータ制御装置40に出力し、現状を維持するための距離0の位置指令を左搬送アクチュエータ制御装置20に出力する。右搬送アクチュエータ制御装置30は制振制御用の位置ゲインを用いて制振制御を行い、旋回アクチュエータ制御装置40は駆動軸42−Kが回転しないように維持制御を行い、左搬送アクチュエータ制御装置20は通常の位置ゲインを用いて駆動軸22−Kが回転しないように維持制御を行う。
(もっと読む)
制御パラメータ調整システム
【課題】制御パラメータの調整テストを適切に終了させることが可能な制御パラメータ調整システムを提供する。
【解決手段】制御パラメータ調整システムは、制御パラメータ調整装置10とテスト監視装置20とを備える。テスト監視装置20は、予め定められた終了条件を満たす場合、制御パラメータ調整装置10にテスト終了信号を送出する。制御パラメータ調整装置10は、テスト監視装置20からテスト終了信号を受信した場合、該テスト終了信号受信時に算出された制御パラメータを制御装置6に適用する。
(もっと読む)
パラメータ同定装置及びパラメータ同定プログラム
【課題】複数のパラメータの同定を適切に行う。
【解決手段】同定パラメータの変化量と表間数の変化量の関係(影響度)を調べる(ステップ11)。影響度に応じて各パラメータの影響度が所定の関係になるように補正量を求める(ステップ12)。求めた補正量により修正ゲインを補正する(ステップ13)。
(もっと読む)
位置決め制御装置の制御パラメータ調整装置及び制御パラメータ調整方法
【課題】パラメータの調整を少ない試行回数で実現する制御パラメータ調整装置を得る。
【解決手段】大きくすると指令追従性を向上させる追従性パラメータを第一の間隔で順次変化させて位置決め制御を行い整定特徴量を測定し、この整定特徴量が許容値を超えない領域に属する追従性パラメータ、及び許容値を超える領域に属する追従性パラメータを求め、二つから決定される領域を精探索の範囲とし、この範囲を、第一の間隔よりも小さい第二の間隔で追従性パラメータを増加或いは減少させ、増減の度に位置決め制御を行い、整定特徴量を測定して適切な制御パラメータを探索する。
(もっと読む)
61 - 80 / 299
[ Back to top ]