
Fターム[5H004KB06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Dの使用 (209)
Fターム[5H004KB06]に分類される特許
81 - 100 / 209
制御装置及び制御方法
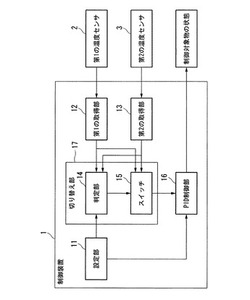
【課題】制御上の無駄時間が生じていたとしても、簡易な構成で、制御を開始してから制御対象を目標値に設定するまでの整定時間を短縮することができる制御装置及び制御方法を提供する。
【解決手段】制御装置は、第1の温度センサ2から検出された第1の値を取得する第1の取得部12と、第1の温度センサ2に比して制御対象物の近くに配置された第2の温度センサ3から検出された第2の値を取得する第2の取得部13と、前記第2の値と予め設定された目標値とを比較した比較結果に応じて、入力値を前記第1の値と前記第2の値とで切り替える切り替え部17と、目標値と入力値の偏差に基づいて前記制御対象物の状態を制御するPID制御部16と、を備える。
(もっと読む)
搬送用制振制御システムのフィ−ドバックコントロ−ラ

【課題】搬送時に搬送物に生じる振動を防止し、かつ制御系の設計及びコントロ−ラの導出も平易な搬送用制振制御システムのフィ−ドバックコントロ−ラを提供する。
【解決手段】 フィ−ドバックコントロ−ラの形を、少なくともノッチフィルタ若しくはロ−パスフィルタを有する周波数制御要素と位置制御要素の組み合わせに限定し、そのフィ−ドバックコントロ−ラの要素の値を最適に与えるために、設計仕様を周波数仕様と時間仕様の両方で与える。
(もっと読む)
温度調節器、温度制御方法および熱処理装置
【課題】傾斜温度制御において、加熱冷却特性に応じた加熱冷却制御を可能にする。
【解決手段】平均温度を制御するための操作量および傾斜温度を制御するための各PID制御部4−1,4−2からの操作量を、各制御点に対応する操作量として前置補償器5で配分し、この操作量を、操作量変換部6−1,6−2で加熱側の操作量および冷却側の操作量に変換するとともに、冷却係数を用いて冷却側の操作量に変換している。
(もっと読む)
システムを制御するための装置および方法
【課題】適応制御は通常、システムパラメータを推定するために、精密なプロセスモデル又はこれらのモデルの近似を必要とする。
【解決手段】適応カスケード比例積分微分コントローラは、固定比例積分微分コントローラコマンド及び固定フィードフォワードコントローラコマンドを含む固定コントローラ出力と、適応カスケードPIDコマンド及び適応フィードフォワードコマンドを含む適応コントローラ出力とを生成し、上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
プラント制御装置、プラント制御方法、プラント制御プログラム、および、そのプログラムを記録した記録媒体
【課題】運転状態が大きく変動する場合でも熟練を要さずに安定した良好な運転状態に制御できるプラント制御装置を提供する。
【解決手段】運転内容変更認識手段343により運転内容がナフサを処理する定常運転である場合、状態制御手段342にてセンサ400で検出した運転状態データを第一目標値にするPID制御をする。コーク除去の非定常運転の場合、付加制御手段344は、状態制御手段342にてセンサ400で検出した運転状態データを第二目標値にするPID制御か、状態制御手段342にて制御する制御量に制御量データの値を加算させてPID制御を実施させる。
(もっと読む)
システム制御装置及びシステム制御方法
【課題】出力と、出力率フィードバック信号と、参照コマンドとを使用して、適応PIDゲインを動的に調整するための、適応PIDコントローラ及び方法を提供する。
【解決手段】適応並列比例積分微分コントローラは、固定比例積分微分コントローラコマンド、及び固定フィードフォワードコントローラコマンドを含む、固定コントローラ出力と、適応並列PIDコマンド及び適応フィードフォワードコマンドを含む、適応コントローラ出力とを生成する。上記コマンドはすべて参照コマンドから得られる。固定コントローラ出力及び適応コントローラ出力は、加算されて、被制御システムのための制御コマンドを生成する。当該被制御システムは、コントローラに対するフィードバックとして、出力の測定値及び出力の変化率を提供する。
(もっと読む)
サーボ制御装置
【課題】実際の応答を見ながら複数の演算器のうち最適な構成を選択し、最短時間応答や最小オーバシュートを実現するサーボ制御装置を提供する。
【解決手段】指令にフィルタ処理をする指令フィルタ(103)と、フィルタ処理後の指令を変換し新たな指令を生成する指令変換器(101)と、フィルタ処理後の指令からフィードフォワードトルク指令を生成するフィードフォワード演算器(102)と、を備え、指令変換器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の特性を演算する演算器を複数備えており、複数の演算器の出力を選択するスイッチを備え、前記フィードフォワード演算器は、制御対象のトルク指令から検出値までを近似した伝達関数モデルの特性の一部の逆特性を演算する演算器を複数備えており、複数の演算器の出力を選択できるスイッチを備えた。
(もっと読む)
パラメータ調整装置および調整方法
【課題】操作量の上下動が無駄になる確率を低減する。
【解決手段】パラメータ調整装置1は、制御対象に一定振幅の操作量MVを繰り返し出力するリミットサイクルを発生させるAT実行部3と、操作量MVの出力に応じた制御量PVの応答を検出する上下動検出部4と、オートチューニングを開始した後に、制御量PVの上下動回数が予め規定された上下動最小回数を経過したときにパラメータ算出開始通知を行う上下動最小回数判定部5と、パラメータ算出開始通知を受けた後、PIDパラメータの算出に必要な制御量PVの応答が得られる度に、PIDパラメータを算出してPID制御機器2に設定するPIDパラメータ値算出部7とを備える。
(もっと読む)
機器およびそのパラメータ設定方法
【課題】複数の同一機器に対してパラメータの設定を行う場合に、効率的にその設定を行えるようにする。
【解決手段】ネットワークにコピー元とコピー先となる温度調節器を接続し、アップロードあるいはダウンロードを設定するとともに、アップロードあるいはダウンロードの対象となる温度調節器を指定し、パラメータコピーの実行を指定することにより、コピー元の温度調節器のパラメータデータが、コピー先の温度調節器に転送されたパラメータがコピーされる。
(もっと読む)
油圧駆動システムの制御方式
【課題】制御上の工夫によって、サーボ弁等の高価なアクチュエータを用いなくても、アクチュエータを精度よく動作させることができる制御方式を提供する。
【解決手段】空間的及び時間的に連続した連続値制御信号uを出力する主制御部11,12と、アクチュエータ2との間に、切換部14を介して選択的にフィードバック変調器20を接続する。フィードバック変調器20は、アクチュエータ2における、入力信号の受付け可能時間間隔、入力信号の取り得る離散値、及び、入出力特性に基づいた変換式によって、連続値制御信号uを空間的及び時間的に離散した離散値制御信号uQに変換する。切換部14は、連続値制御信号uの値が変調領域に入っているときにはアクチュエータ2へ離散値制御信号uPが出力され、それ以外のときは連続値制御信号uが出力されるように、接続を切り換える。
(もっと読む)
調節計、及びその動作方法
【課題】利便性を向上することができる調節計、及びその動作方法を提供すること。
【解決手段】本発明にかかる調節計は、計測値を設定値に近づけるように、制御パラメータに応じた操作量を制御対象に出力する調節計であって、計測値に基づいて制御応答の特徴量を算出する演算処理部11と、特徴量を保持するメモリ領域を複数有する書換可能なEEPROM12と、を備え、メモリ領域12a、12bに対応した特徴量を利用して各メモリ領域の書き込み優先度を算出し、優先度を利用して書き込み対象のメモリ領域12aを決定し、設定値を変更した際に、書き込み対象のメモリ領域12a上の特徴量のデータが無効と識別可能な状態にし、メモリ領域12a上の特徴量のデータが無効と識別可能な状態になった後、メモリ領域12a上に最新の制御動作で検出された特徴量を書き込むものである。
(もっと読む)
プロセス制御装置及びプロセス制御システム
【課題】容易にプロセス制御機能を変更することができるプロセス制御装置を得る。
【解決手段】監視装置2の自動選択指令手段2aからの指令信号によりプロセスの動特性を測定し、測定結果に基づき制御命令群メモリ12に記憶された制御命令群の中から所定の制御命令を選択してループタグテーブルメモリ15のFUNCコードメモリエリア15aにコードとして記憶させる自動選択手段20と、FUNCコードメモリエリア15aに記憶された制御命令を参照しながら所定のプログラムを実行することによりプラントのプロセスを制御するCPU16とを備えた。自動選択手段20によりプログラムが参照する制御命令を変更するので、プログラムを変更することなく容易に制御機能を変更できる。
(もっと読む)
PIDパラメータ調整装置および調整方法
【課題】パラメータ調整の工数を削減する。
【解決手段】PIDパラメータ調整装置1は、制御対象に一定振幅の操作量を繰り返し出力するリミットサイクルを発生させて、操作量の出力に応じた制御応答とAT係数に基づきPIDパラメータを算出してPID制御機器2に設定するAT実行部4と、検出された制御応答の情報を記憶するAT情報記憶部6と、AT係数を記憶するAT係数記憶部5と、PIDパラメータの再設定を行うことを指示するAT再設定信号を生成するAT再設定信号生成部9と、AT再設定信号が入力されたときに、記憶されている制御応答の情報とAT係数記憶部5に記憶されているAT係数に基づきPIDパラメータを算出してPID制御機器2に設定するPIDパラメータ値再設定部10とを有する。
(もっと読む)
PID制御機器および不揮発性メモリ保護方法
【課題】EEPROM等の不揮発性メモリが寿命に到達する確率を低く抑える。
【解決手段】PID制御機器は、パラメータの最新値を記憶するRAM3と、パラメータの確定値を記憶するEEPROM4と、RAM3またはEEPROM4への書込み/読出しを行う書込/読出部5とを有する。書込/読出部5は、PIDパラメータの設定変更操作以外の操作を検出する操作検出部50と、操作検出部50がPIDパラメータの設定変更操作以外の操作を検出したときに、RAM3に記憶されているPIDパラメータの最新値を確定値としてEEPROM4に書き込む書込処理部51とを備えている。
(もっと読む)
パラメータ調整装置および調整方法
【課題】制御機器のオートチューニングにおいて確実に必要な回数だけ操作量を上下動させる。
【解決手段】パラメータ調整装置1は、制御対象に一定振幅の操作量MVを繰り返し出力するリミットサイクルを発生させるAT実行部3と、操作量MVの出力に応じた制御量PVの上下動幅を検出する上下動検出部4と、制御量PVの上下動幅の増幅の停止と上下動幅の減衰の停止とを別個に確認できたときに、オートチューニングを完了可能な状況であると判定するAT完了可否判定部5と、操作量MVの出力に応じた制御量PVの応答に基づきPIDパラメータを算出してPID制御機器2に設定するPIDパラメータ値算出部7とを有する。AT実行部3とPIDパラメータ値算出部7とは、オートチューニングを完了可能な状況であると判定された後に、オートチューニングを終える。
(もっと読む)
フィードバック制御ゲインの設定方法及び設定支援プログラム
【課題】非反証制御の考え方をオフラインでの制御系設計に適用し、制御ゲインの最適値を計算によって求め得るようにして、設定の容易化を図るとともに、多入力多出力系にも適用可能な画期的な方法を提供する。
【解決手段】制御対象(プラント)Pにステップ入力等を加えたときの入出力応答データを少なくとも1つ採取する(ステップS1)。このデータに基づいて所定数以上の仮想の入出力応答データを生成し(S2,S3)、これらをそれぞれ反証演算式に代入してパラメータ空間に所定数以上の非反証領域を規定する(S4)。反証演算式を線形制約式とすることで、所定数以上の非反証領域の積集合の領域において制御ゲインの最適値を計算により求めることができ(S5)、多入力多出力系にも適用可能になる。
(もっと読む)
制御機器および制御方法
【課題】通常時は操作量の急変を抑制し、外乱抑制時などの緊急時には必要とされる操作量の急変を抑制しないようにする。
【解決手段】制御機器は、外部から入力された制御量目標値SPnの変化率の変化率を上限値と下限値の範囲内に制限する上下限処理を行い、上下限処理後の制御量目標値SPn’を算出する目標値変化量変化量制限部3と、算出された制御量目標値SPn’と制御量PVとの偏差に基づいて操作量MVを算出して制御対象に出力するPID制御演算部4とを備える。
(もっと読む)
デジタルPID制御装置
【課題】デジタル制御化されたPID制御装置の制御動作を低振動化および低騒音化し、制御精度を向上させる。
【解決手段】デジタルPID制御装置であって、制御対象1の現在のアナログ状態量を検出する検出器2と、現在のアナログ状態量を現在のデジタル状態量に変換するAD変換器11と、制御対象1の目標のデジタル状態量と現在のデジタル状態量との差分である偏差量を入力とし、制御対象1に対するデジタル操作量を生成するデジタルPID制御手段9とを備え、デジタルPID制御手段9は、偏差量の絶対値が設定値以下の場合には偏差量を抑圧して出力する積分用不感帯部12および微分用不感帯部13のうち少なくとも一方を備え、積分用不感帯部12の出力に対するデジタル積分演算及び微分用不感帯部13の出力に対するデジタル微分演算のうち少なくとも一方の演算を実行することによりデジタル操作量を生成する。
(もっと読む)
制御装置および制御方法
【課題】電流値の総和を制限する。
【解決手段】優先側上限処理部L_MH1と非優先側上限算出部C_MH2と優先側上限算出部C_MH1 とは、コントローラPID1,PID2から出力される操作量出力MV1 ,MV2 の総和が制御装置全体の操作量出力上限値MT1以下となるように抑制する。一方、総電流値算出部C_CTaは、操作量出力MV1 ,MV2に応じて2個のヒータに流れる電流値の総和である総電流値を算出し、総操作量値算出部C_MTaは、操作量出力MV1,MV2の総和である総操作量値を算出する。全体操作量出力上限値算出部C_MT1は、総電流値と総操作量値とから制御装置全体の操作量出力上限値MT1を修正する。
(もっと読む)
オートチューニング方法、温度調節器および熱処理装置
【課題】冷却制御において、適切な制御パラメータを得られるようにする。
【解決手段】加熱冷却制御において、加熱側のオートチューニングは、期間T1において、100%のステップ状の加熱操作量を印加してステップ応答波形から加熱側のPIDゲインを算出し、冷却側のオートチューニングは、期間T3において、50%以下である30%のステップ状の冷却操作量を印加して冷却側のPIDゲインを算出するようにしている。これによって、水冷のような非線形特性を示す冷却方式の場合に、100%の冷却操作量を印加して冷却側のPIDゲインを算出する従来例に比べて、より正確に制御対象の特性を同定して、適切な冷却制御の制御パラメータを求めることが可能となる。
(もっと読む)
81 - 100 / 209
[ Back to top ]