
Fターム[5H004KB06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Dの使用 (209)
Fターム[5H004KB06]に分類される特許
121 - 140 / 209
偏差量補償プログラム、偏差量補償装置、PID制御出力補償装置

【課題】応答性及びロバスト性の向上を容易にできる経済性に有利なPIDフィードバック制御システムを提供する。
【解決手段】図1に示すような、制御機能110、減算機能112、及び目標値設定機能114を備えたPIDフィードバック制御システムにおいて、前記目標値と前記制御量を取得して、前記制御量を、ランプ状に変化する前記目標値に追従させる追値制御中であるか否かを示す信号を出力する機能と制御量の微分に応じて出力する機能などにより偏差を調整する偏差補償プログラムを備える。
(もっと読む)
モデル構造、制御装置、温度調節器および熱処理装置

【課題】非干渉化制御などに好適な制御対象のモデル構造、それを用いた制御装置、温度調節器および熱処理装置を提供する。
【解決手段】制御対象モデル1を、2出力z1,z2の差を、フィードバック要素Pfを介して2入力u1,u2に、正負を異ならせてそれぞれフィードバックする、すなわち、温度差(出力差)に応じて、一方から他方へ熱量(操作量)が移動するという現象に適合するモデル構造とし、このモデル構造を用いて、非干渉化器8によって、その干渉を打ち消すように構成している。
(もっと読む)
熱処理装置、制御定数の自動調整方法及び記憶媒体
【課題】PID制御による温度制御を行って被処理体を熱処理する装置において、確実にかつ容易にPID定数のチューニングを行うことができる技術を提供すること。
【解決手段】PID定数を設定した後、処理雰囲気を昇温させて温度プロファイルを取得し、温度特性項目の値と目標値との差分が許容範囲から外れていればールテーブル84を参照してその差分に応じた当該温度特性項目の予測変化量に対応する変更率によりPID定数を変更して再設定し、その後、前記差分が許容範囲内になるまで同様のステップを繰り返すと共に、前記ルールテーブル84を使用した後の温度特性項目の実測変化量に基づいてルールテーブルにおけるPID定数と当該温度特性項目の予測変化量との対応関係を更新するようにしてルールテーブルに学習機能を持たせている。
(もっと読む)
制御装置、温度調節器およびゲイン調整装置
【課題】傾斜温度(温度差)を用いた温度制御などにおいて、干渉の強い制御対象であっても、ハンチング等が生じないようにすることを目的とする。
【解決手段】温度差である傾斜温度に基づいて、操作量を演算する傾斜モモードのコントローラCgと、平均温度に基づいて、操作量を演算する平均モードのコントローラCaとを備える温度調節器において、傾斜温度に基づいて、干渉を打ち消すように、傾斜モードおよび平均モードの各コントローラCg,Caの操作量を調整する傾斜モードおよび平均モードの非干渉化器Fg,Faを設けている。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
PID制御器の制御パラメータの調整方法及び調整装置
【課題】PID制御器の制御パラメータを反証に基づいて単一の応答からでも簡易に調整する。
【解決手段】目標値信号と制御対象の出力信号との差分信号を出力する減算器と、差分信号が入力されるPID制御器と、PID制御器の出力信号が入力される制御対象とから構成される制御システムにおけるPID制御器の制御パラメータを調整する方法であって、制御対象への入力信号及び出力信号を通過域が互いに異なる複数のフィルタを用いてそれぞれ処理することによりフィルタ毎に処理後入力信号及び処理後出力信号を取得し、これらの信号を用いてPID制御器の制御パラメータである比例ゲインp1、積分ゲインp2、微分ゲインp3を要素とするベクトルpを反証することにより、PID制御器の制御パラメータを調整する方法であって、差分信号から評価値z1を得るための第1の重み関数Vを定数とする。
(もっと読む)
改良型プロセス制御用のモデルメンテナンスアーキテクチャ
【課題】改良型プロセス制御コントローラ用の施設におけるプロセスの動的モデルを変更するシステム及びその方法を提供する。
【解決手段】モデルメンテナンスを実施するアーキテクチャ100は、性能モニタツール120により監視された制御器115の性能の低下を定量化し、所定数のサブモデル又は全モデル動的情報が制御器の定量化された性能低下の関数として更新される必要があるかどうかを決定する。所定数のサブモデルを更新する必要がある場合、新たなサブモデルを識別するよう励起信号をサブモデルに対し発信し、全モデル動的情報を更新する必要がある場合、完全摂動信号を発信して、全モデルの完全閉ループの識別を開始する。新たに識別されたモデル又はサブモデルを制御器115に組み込む。
(もっと読む)
電子制御装置及びフィードバック制御方法
【課題】制御対象装置に印加される電源電圧が変動した場合でも、適切な制御を行うことを可能とする電子制御装置及びフィードバック制御方法を提供する。
【解決手段】制御対象の前記目標値と実測値との偏差と前記制御対象に係る駆動装置に印加される電源電圧値とをパラメータとして、前記伝達関数の制御係数及び/又は前記伝達関数の積分項の零点設定値を補正する補正値を格納する参照手段を備え、当該参照手段から得た前記伝達関数の補正値に基づいて前記伝達関数の制御係数(又は積分項の零点設定値)を補正し、この補正された伝達関数に基づいて前記駆動装置へ出力される駆動信号を決定する。
(もっと読む)
PID制御装置及びPID制御方法
【課題】予測モデルに基づいて、PID制御対象への入力の差分に対する重み係数を含む制御則を用いてPIDパラメータを決定して、上記制御対象を制御する場合に、上記重み係数を適切にかつ容易に設定できるようにして、所望の制御性能が確実に得られるようにする。
【解決手段】制御誤差の分散と制御対象への入力の差分の分散とに関するトレードオフ曲線を描くとともに、このトレードオフ曲線上において、予め設定された所定の条件を満足する位置を求めかつ該位置に対応する重み係数及びPIDパラメータを求めて、該PIDパラメータを、制御対象を制御するためのPIDパラメータとして決定する。
(もっと読む)
制御装置、制御方法および制御プログラム
【課題】外乱等による特性変動のある制御対象に対し、PID調節計を用い高精度で低コストの制御が可能な制御装置、制御方法および制御プログラムを提供する。
【解決手段】制御装置は、PID調節計の比例要素11、積分器11および微分器12を備え、制御量測定値の制御量設定値からの偏差にリミッタ値を設定する偏差リミッタ14、そして、偏差調節要素15、微分リミッタ16、積分演算出力を初期化する積分初期化手段17、演算切換器18を有している。ここで、演算切換器18は、スイッチ19等と共に、上記PID調節計による通常のPID演算と、制御対象20の特性変動が生じたときに上記偏差調節要素15、微分リミッタ16、積分初期化手段17が作動するPid演算とを、例えば特性変動がある場合に偏差リミッタ14に従って切り換えるようになっている。
(もっと読む)
制御装置
【課題】時間的に変化する指令値に対して制御量がなるべく正確に追従するとともに、指令値が停止した後にもオーバーシュートを抑制しながら、制御量を早く整定させる制御装置を提供する。
【解決手段】制御装置は、制御対象から入力される制御量と外部から入力される指令値とに基づいて算出する操作量を上記制御対象へ出力する制御装置において、上記指令値が連続的に変化する時点において上記指令値に対して先行する予測指令値を少なくとも上記指令値に基づいて生成する予測指令生成部と、外部から入力される停止目標値に基づく制限値で上記予測指令値を制限することにより追従指令値を生成する制限器と、上記制御量が上記追従指令値に追従するように上記制御対象を制御する上記操作量を出力する追従制御部と、を備える。
(もっと読む)
PID制御装置及びPID制御方法
【課題】PID制御対象を制御するためのPIDパラメータを決定して、該PIDパラメータを用いて、上記制御対象を制御する場合に、予測モデルを構築しないで最適なPIDパラメータを容易に決定できるようにして、制御の信頼性を向上させる。
【解決手段】時刻tの時点での制御対象への入力、該制御対象からの出力及び目標値をそれぞれu(t)、y(t)及びr(t)とし、上記入力の差分に対する重み係数をλとし、むだ時間をkとし、差分演算子をΔとしたとき、
φ(t+k)=y(t+k)−r(t)+λΔu(t)
で表される一般化出力φ(t+k)が小さくなるように、上記PIDパラメータを決定する。
(もっと読む)
PID制御方法及びPID制御装置
【課題】オーバーシュートが少なく、かつ計算工程が少ないPID制御装置及びPID制御方法を提供すること。
【解決手段】予め設定される目標値と制御対象から得られる測定値との偏差により操作量を算出するPID制御方法において、
前記制御対象に基づいて設定されるパラメータにより決定された制御可能範囲内において、目標値と測定値との偏差より偏差変化速度を決定し、
前記偏差変化速度から偏差変化速度の最大値を決定し、
前記偏差変化速度の最大値、前記偏差、ARW及び比例帯に基づいてオーバーシュートを生じさせないで目標値に到達することのできる理想偏差変化速度を算出し、
前記偏差変化速度と前記理想偏差変化速度とに基づいて補正偏差を算出してこの補正偏差をI演算に用いることを特徴とするPID制御方法及び装置。
(もっと読む)
作動中のプロセス環境における動的プロセスシミュレーションの更新と利用
【課題】シミューレーション・システムが使い易く且つ更新し易くなる態様でプロセスプラントのプロセス制御環境に統合する。
【解決手段】シミューレーション・システムにより生成されたプロセスパラメータの現在の予測値だけでなく将来的な予測値を、性能評価に利用し、並びにプラントの動作を誘導するために利用することが可能になる。また、該シミューレーション・システムは、プロセスプラントに関する様々なオンライン計測値を受信できるように作動中のプロセスプラントに接続されており、シミューレーション・システムで使用されるプロセスモデルを自動的に更新してシミューレーション・システムをプロセスプラントの実際の作動状態と協調(coordinate)した状態に保つために、これらの計測を使用する。
(もっと読む)
温度制御装置、温度制御方法および温度制御プログラム
【課題】複数の温度制御領域を持つ制御対象の多点温調制御にモデル予測制御を適用した上で、モデル予測制御の設計パラメータの最適化を図る。
【解決手段】温度制御システムには、シリンダ31の各ゾーンZ1、Z2、・・・、Znの温調制御をモデル予測制御に基づいて連携させながら行う多点温度調節手段21を設けるとともに、パネルコンピュータ22の上位にはパーソナルコンピュータ11が設け、パーソナルコンピュータ11には、モデル予測制御における設計パラメータの最適化を行うモデル予測制御支援手段12を設ける。
(もっと読む)
オートチューニング装置およびオートチューニング方法
【課題】リミットサイクル方式によるオートチューニング実行時の操作量の上下限値の設定が適切か否かを判定する。
【解決手段】オートチューニング装置は、リミットサイクルオートチューニングの実行時に、制御対象に一定振幅の操作量を出力し、操作量出力に応じた制御応答に基づいてコントローラの制御パラメータを算出するリミットサイクルオートチューニング演算部6と、リミットサイクルオートチューニングの実行中に操作量の上限値が出力される操作量上限値出力時間と操作量の下限値が出力される操作量下限値出力時間を測定する時間測定部8と、操作量上限値出力時間と操作量下限値出力時間との比率RTを算出する比率RT算出部9と、比率RTに基づいて操作量の上下限値の設定が適切か否かを判定する判定部10とを備える。
(もっと読む)
制御装置、制御パラメータの調整装置、制御パラメータの調整方法およびプログラム
【課題】ユーザによる学習係数の調整作業を不要にすることを目的とする。
【解決手段】制御量の時系列データおよびPID制御パラメータを、状態ベクトルとしてデータベース6に蓄積し、新たな状態ベクトルが与えられると、蓄積されたデータベース6の状態ベクトルに基づいて、局所モデルとして新たな状態ベクトルに対応するPID制御パラメータを生成してPID制御器3のPID制御パラメータを調整するとともに、学習係数を用いて、制御誤差が小さくなるようにPID制御パラメータを修正してデータベース6に蓄積し、前記学習係数を、予め定めた算出式によって算出するようにしている。
(もっと読む)
プロセス制御ネットワークに統合された分析サーバ
【課題】プロセス制御ネットワークに統合された分析サーバを提供する。
【解決手段】プロセス制御システムは、より高速且つ効率的なプロセス制御ルーチンのサポートを提供するために、プロセス制御ルーチンの一つ又は複数が実施される同一の制御装置において、適応モデルの生成およびチューニング・パラメータの生成のような計算上コストの高い特定のプロセス制御機能を実行するのに使用されるプロセス制御データの収集および分析を統合する。該システムは、一つ又は複数の制御ルーチンにより使用される計算上コストの高い解析を実行する分析サーバを制御ルーチンが設けられる実時間制御装置に直接統合することにより、複数の処理装置を使用する階層化アプローチに取って代るものである。この統合は、特定の装置により制御される複数のプロセスループに対して大量のデータを高速且つ効率的に分析する能力を提供する。
(もっと読む)
非同期センサ情報に基づく測定値予測を使用して抄紙機または他の機械を制御する装置および方法
方法は、
プロセス(204)を制御するために、コントローラ(202)によって使用される測定値または状態を予測することを含む。予測される測定値または状態は、プロセス(204)のモデルを使用して生成される。方法は、また、予測される測定値または状態をコントローラ(202)に提供することであって、それにより、コントローラ(202)は、予測される測定値または状態をコントローラ(202)のサンプリングレートで使用する、提供することを含む。さらに、方法は、センサからのアイテムの特性に関連する測定値を使用して、予測される測定値または状態の少なくとも一部を更新することを含む。モデルは、離散時間モデル(304)を表してもよく、方法は、また、プロセス(204)の連続時間モデル(302)を使用して離散時間モデル(304)を生成することを含んでもよい。測定値は、複数のセンサ(122、124)から受信されることができ、センサのうち少なくとも2つは、異なるサンプリング時間を有する。 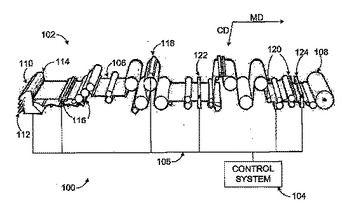 (もっと読む)
(もっと読む)
剛性同定装置およびそれを備えたモータ制御装置
【課題】 非剛性パラメータが分からない場合にも、微小動作のみで負荷が低剛性に連結したモータの剛性を高精度に同定することができる剛性同定装置およびそれを備えたモータ制御装置を提供する。
【解決手段】 剛性同定器107が、トルク指令とモータ位置との乗算値である位置トルク指令乗算値を算出する位置トルク指令乗算器108と、モータ位置の振幅であるモータ位置振幅を算出する位置振幅演算器109と、前記位置トルク指令乗算値と前記モータ位置振幅に基づいて剛性同定値を算出して出力する剛性演算器110と、を備える。
(もっと読む)
121 - 140 / 209
[ Back to top ]