
Fターム[5H004KB06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Dの使用 (209)
Fターム[5H004KB06]に分類される特許
41 - 60 / 209
プロセス制御システムの制御ループタイミングを調整する方法及び装置

【課題】プロセス制御システムの制御ループタイミングを調整する方法及び装置を提供する。
【解決手段】本方法は、プロセス制御システム内の第1のプロセス制御装置を利用して生成される第1の入力信号を受信する工程と、第1の入力信号が、制御ループの第1の予定時間枠の間に受信されたか否かをプロセス制御システム内で判定する工程と、後に続く入力信号が、後に続く制御ループの予定時間枠の間に受信されるように、第1のプロセス制御装置から受信される後に続く入力信号のタイミングをプロセス制御システム内で調整する工程であって、後に続く入力信号のタイミングは、第1の入力信号が受信された時間に少なくとも基づいている、タイミングを調整する工程と、を含んでいる。
(もっと読む)
熱処理装置の温度制御方法

【課題】高精度で且つ制御性能が高い温度制御を行うことができる熱処理装置の温度制御方法を提供する。
【解決手段】第1のPID演算要素と第2のPID演算要素とでカスケード制御を行う温度コントローラを有する熱処理装置の温度制御方法において、第1のPID演算要素の第1の操作量の上下限判定範囲を、炉内温度が目標値に一致しているときの該第1の操作量の値を基準に正負両側に略同じ値である範囲とし、かつ第1のPID演算要素で計算された第1の操作量がその上限値を超えたと判定されたときは該第1の操作量が前記上下限判定範囲の上限値になる分だけ前記第1のPID演算要素の積分操作量を増加させ、その下限値を下回ったと判定されたときは該第1の操作量が前記上下限判定範囲の下限値になる分だけ積分操作量を減少させる。
(もっと読む)
温度制御装置及び温度制御方法
【課題】オーバーシュートの発生を抑制しつつ、温度変化の立ち上がり時間を充分に短くできる温度制御装置及び温度制御方法を提供する。
【解決手段】制御対象の初期温度Ts毎に、目標温度Teを得るための操作信号Wである最終出力値Weを記憶させておき、温度制御の起動時に、そのときの初期温度Tsに対応する最終出力値Weを検索する。そして、前記最終出力値Weに所定比率Rs(<100%)を乗算して起動出力値Wsを求め、PID動作における積分動作出力の初期値として、前記起動出力値Wsを設定することで、操作信号Wをステップ的に起動出力値Wsにまで変化させる。その後、制御対象の実際の温度Tと目標温度Teとの偏差eに応じて操作信号Wを変化させ、実際の温度Tが目標温度Teに収束したときの積分動作出力を、前記最終出力値Weとして更新記憶させる。
(もっと読む)
フィードバック制御装置及びフィードバック制御プログラム
【課題】スイッチング素子のON/OFF動作に起因するノイズの影響を受けない形でフィードバック制御を行えるフィードバック制御装置を提供する。
【解決手段】フィードバック制御装置は、PWM信号発生部12に対する制御内容を決定するために必要な情報を得るためにセンサ21からのアナログ信号をADコンバータ17にAD変換させる際に、スイッチング素子14のスイッチング動作を停止させる構成(遅延回路16、2入力NANDゲート13)を備える。
(もっと読む)
連続的にスケジュールされるモデルパラメータに基づく適応制御装置
【課題】制御装置の調整パラメータを進行するために使用される連続的にスケジュールされるプロセスモデルパラメータを決定する適応プロセス制御装置を提供する。
【解決手段】状態に基づく適応PID制御装置は、プラントの種々の稼動領域における適応調整を実行するために使用される、適切なプロセスモデルを決定するための新しい技術を使用し、特に、当該の種々のプラント稼動領域または点において連続的にスケジュールされるプロセスモデルパラメータの更新を可能にする、プロセスモデルパラメータ決定技術を使用する。この連続的にスケジュールされるプロセスモデルパラメータ更新方法の使用により、プロセスの稼動領域または稼動点における変更に基づいて実行される適応調整手順中に、当該PID制御装置で使用される調整パラメータ間でのより円滑な遷移が実現されるため、全体的な制御が向上する。
(もっと読む)
自動化されたPIDコントローラの設計
本発明の実施形態は、ユーザーが、自由形式モデリング環境においてPIDコントローラなどのコントローラの対話型設計を実行できるようにするための技術、コンピュータ読み取り可能媒体、及び装置を提供する。ユーザーは、コントローラの性能に関連付けるのがユーザーには難しい場合があるコントローラのゲイン値の指定をするのではなく、典型的なユーザーになじみのなる特徴を用いてコントローラを調整することができる。 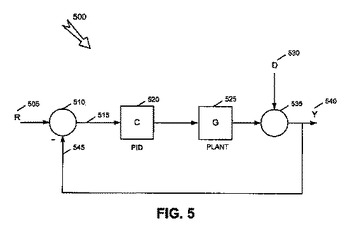 (もっと読む)
(もっと読む)
精密温調システム、その制御装置
【課題】精密温調システムにおいて、非定常外乱が生じた場合でも温調対象空間の空気温度の変動を最小限に抑える。
【解決手段】外乱推定部11、ノミナルプラント14を備える外乱オブザーバ部10を設ける。ノミナルプラント14は制御対象4を模擬するモデルである。制御対象4のモデル化は、温調対象空間(チャンバ等)やエアダクトにおける空気の熱量、流れを考慮して行う。外乱推定部11は、このノミナルプラント14のモデルに応じた伝達関数を用いて、制御対象5の出力yとノミナルプラント14の出力yNとの偏差(yN−y)に基づいて外乱推定値dmを生成・出力する。この外乱推定値dmに対して所定のゲインKADD(≦1;例えば0.7程度)を乗じた値を、操作量MV(s)に加える。
(もっと読む)
PID調整装置およびPID調整プログラム
【課題】PID調節器の調整方法等に関して、広く現場のエンジニアに普及させることが可能となり、且つ調整労力と時間とを著しく短縮できるPID調整装置30等を提供する。
【解決手段】伝達関数パラメータ取得部32は、制御対象10に入力する操作量MVの時系列データと操作量MVに応じて制御対象10から出力される制御量PVの時系列データとに基づき制御対象10を表現する複数の伝達関数のパラメータを求める。適合性取得部34は当該パラメータを有する各伝達関数が出力した推定制御量と実際の制御量との適合率を求める。最良伝達関数選択部36は当該適合率に基づき、最良の適合性を有する伝達関数を選択する。最適PIDパラメータ探索部38は、選択された伝達関数11等を対象として設定値SVに対する設定値応答及び外乱dに対する外乱応答の結果から予め決めておいた評価指標を満たすようにPID調節器20のPIDパラメータを探索する。
(もっと読む)
物理量制御装置、物理量制御方法及び物理量制御プログラム
【課題】ザゼンソウ型制御アルゴリズムと、従来の汎用制御アルゴリズムとを融合させ、広範囲な制御対象に対して適応した物理量制御アルゴリズムを提供する。
【解決手段】温度制御装置は、遅延器1、温度センサー3、第1のザゼンソウ型制御部、第2のPID制御部11、エネルギー発生器4,ヒーター5、混合器21を備え、第1のザゼンソウ型制御部は現在温度と前回温度との時間変化勾配をパラメータとし、第2のPID制御部11は現在温度と目標温度との差をパラメータとし、第1のザゼンソウ型制御部と第2のPID制御部11が並列に接続されることを特徴とする。
(もっと読む)
PID制御装置
【課題】 制御量が周期的な変動を呈している積分プロセスにおいて、制御対象に同定用信号を与えることなく、PID制御器のチューニングを可能とする。
【解決手段】 制御対象12に操作端14から加える操作量と、検出器15で検出される制御量から、周期解析手段31で周期を求める。積分特性算出手段である簡易積分器32で積分ゲインが求められ、プロセスモデル30が生成される。制御モデル20、制御モデルのPIDパラメータを調整する評価器21と併せて制御シミュレータ16を構成し、シミュレーションによって最適なPIDパラメータを算出する。算出した制御モデルのPIDパラメータを、プロセスの要求に合わせて微調整し、制御器13の制御パラメータとして設定することができる。
(もっと読む)
電空コントローラにおいて駆動値の変更を制限する方法および装置
電空コントローラにおいて駆動値の変更を制限する例示の方法および装置が開示される。開示する例示の方法は、制御信号およびフィードバック信号を受信することと、制御信号およびフィードバック信号から駆動値を算出することと、駆動値と以前の駆動値との差異が電空コントローラのスルー限界よりも大きいか否かを決定することと、スルー限界に基づいて算出された駆動値を変更することとを含む。 (もっと読む)
水車またはポンプ水車用調速制御装置
【課題】水車またはポンプ水車用調速制御装置において、発電機の負荷遮断後、ガイドベーン閉鎖特性の適正化と、軸系の回転速度および導入鉄管の水圧変動の安定性を確保する。
【解決手段】出力増減指令1による指令値と、軸回転速度19とガイドベーン9の開度の検出値との偏差を演算する制御入力演算器3の演算値を入力するPIDコントローラ4と、フィードフォワード制御要素22を設け、発電機18の負荷遮断信号を受信するフィードフォワード制御要素22によって、予め設定されたガイドベーン閉鎖特性の関数でトラッキング演算するようPIDコントローラのI(積分)演算要素6が制御され、その演算結果と、P(比例)5、D(微分)6演算要素の結果和でガイドベーン開度を制御する調速制御装置2。
(もっと読む)
サーボ制御回路、アクチュエータの制御装置、および撮像装置
【課題】周波数が高い領域においても良好な制御特性を維持するとともに、集積回路化が容易なPID制御によるサーボ制御回路を提供する。
【解決手段】サーボ制御回路100において、差分演算部10は、制御対象から検出された検出信号xに比例した量と第1の信号fに比例した量との差uを出力する。A/D変換部21は、差分演算部10の出力uをデジタル変換する。積分部22は、A/D変換部21の出力Uをデジタル積分する。D/A変換部23は、積分部22の出力に比例した量Fをアナログ変換して、第1の信号fとして出力する。加算演算部15は、A/D変換部21の出力Uに比例した量と積分部22の出力Fに比例した量との和Dを出力する。デジタルPI制御部40は、加算演算部15の出力Dと目標値Rとの偏差Eに基づいて比例演算および積分演算を行なうことによって、制御対象を制御する制御信号Yを生成する。
(もっと読む)
弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラム
【課題】弾性体アクチュエータで駆動されるロボットアーム等の可動機構を事前に想定した環境以外でも、位置又は力を精度良く制御できる、弾性体アクチュエータの制御装置及び制御方法、並びに、制御プログラムを提供する。
【解決手段】出力の目標値から出力値を減じた値にゲインを乗じた値を積分した適応オフセット値と、出力の目標値から初期値を減じた値に、出力の目標値から出力値を減じた値を乗じた値にゲインを乗じた値を積分した適応ゲイン値を算出し、適応ゲイン値に出力の目標値を乗じた値と、適応オフセット値とを加算した値を内部状態の目標補正値として適応目標内部状態補正手段で決定する。
(もっと読む)
むだ時間補償制御装置
【課題】制御対象だけでなく、制御装置内のむだ時間を補償することにより、制御系の安定性向上を図ったむだ時間補償制御装置を得る。
【解決手段】出力Y(s)のフィードバック値と目標値U(s)との偏差は制御装置1に入力されると同時に、制御装置むだ時間補償器6に入力され、制御装置むだ時間補償器6で求められた補償信号Pc(s)がむだ時間を経た制御量にフィードフォワード制御される。この結果得られる制御装置むだ時間e−Lc・sを補償後の制御量は、制御対象2に入力されると同時にスミス補償器4に入力され、求められた補償信号Pp(s)が制御装置1の前段にフィードバックされる。
(もっと読む)
パラメータ決定装置及び方法並びにプログラム
【課題】制御器の切替時において、切替後の制御の特徴を調整すること。
【解決手段】複数の制御器を備えるシステムにおいて、処理を行う制御器を切り替える場合に、切替後の前記制御器で用いるパラメータを決定するパラメータ決定装置であって、異なる特徴を有する複数の演算式の組み合わせからなり、該異なる特徴の重みづけを変更可能とするパラメータ算出演算式を備え、パラメータ算出演算式を用いることにより、切替後の制御器において使用されるパラメータを決定する。
(もっと読む)
制御装置および制御方法
【課題】測定が困難な実体物の制御量の代わりに、実体物に関係する計測点の制御量を測定して制御する場合に、実体物の制御量の設定値への追従速度を向上させる。
【解決手段】制御装置は、昇温開始点POと昇温幅PHと操作量維持値MHとからなるオンラインデータから維持時間TXを推定する推定用多項式を記憶する推定用多項式記憶部1と、推定用多項式を用い、入力されたオンラインデータから維持時間TXを推定する維持時間TX推定値算出部4と、昇温開始時点から維持時間TXが経過するまでの初期制御期間において、操作量維持値MHを目標として操作量MVを出力する操作量維持制御部5とを備える。
(もっと読む)
制御装置および制御方法
【課題】ガス燃焼炉と電気炉のハイブリッド型熱処理炉についてガスモードから電気モードに早く確実に切り換える。
【解決手段】制御装置は、追従フェーズへ切り換える第1のフェーズ切換部3と、収束フェーズへ切り換える第2のフェーズ切換部4と、安定フェーズへ切り換える第3のフェーズ切換部5と、追従フェーズの操作量を出力する第1の操作量決定部6と、収束フェーズの操作量を出力する第2の操作量決定部7と、安定フェーズの操作量を出力する第3の操作量決定部8と、ハイブリッド型熱処理炉をガス燃焼炉として動作させる操作手段に第1の操作量決定部6からの操作量を出力するガスモード操作量出力部9と、ハイブリッド型熱処理炉を電気炉として動作させる操作手段に第2、第3の操作量決定部7,8からの操作量を出力する電気モード操作量出力部10とを備える。
(もっと読む)
プラント制御システムおよび制御方法
【課題】同定波形採取のための同定実験を行わず、プラントの立ち上げデータを用いてプラントの同定、及び、制御パラメータの調整を実現可能とするプラント制御システムを提供する。
【解決手段】システム支援ツール100は、制御装置200内の各部(MPC制御部210,PID制御部220)および制御対象230の起動制御を行って各部を起動する。各部を起動することで、制御量(PV),操作量(MV),設定値(SV)に関する各ゾーン毎のデータを、システム支援ツール100のデータロギング機能を用いて採取する。システム支援ツール100は、立ち上げデータを元に同定機能を用いて、プラントのモデルパラメータを推定する。そして制御パラメータ調整機能を用いて、モデル予測制御(MPC)部210及びPID制御部220に係る制御パラメータを同定結果のモデルパラメータを使って計算する。
(もっと読む)
制御装置および制御方法
【課題】操作量総和を操作量総和下限値以上の値に維持しつつ、制御の限界を改善する。
【解決手段】制御装置は、各制御ループの制御量PV1,PV2と設定値SP1,SP2との偏差に基づいて操作量MV1,MV2を算出するPID演算部22−1,22−2と、操作量MV1とMV2の総和MV_allを算出する操作量総和算出部31−1,31−2と、複数のゾーンZ1,Z2のうち予め規定されたゾーンの制御の整定状態を検出したときに、整定時の各ゾーンZ1,Z2の操作量MV1,MV2と整定時の操作量総和MV_allとの比に応じて、予め規定された操作量総和下限値OL_allを各ゾーンに配分し、この配分した値を各ゾーンの操作量下限値OL1,OL2とする下限値配分部32−1,32−2とを備える。
(もっと読む)
41 - 60 / 209
[ Back to top ]