
Fターム[5H004KB06]の内容
フィードバック制御一般 (10,654) | 制御部 (1,246) | PID制御又はその類型 (1,013) | Dの使用 (209)
Fターム[5H004KB06]に分類される特許
21 - 40 / 209
流体制御装置
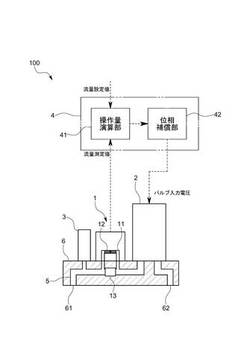
【課題】デジタル制御を採用したバルブ制御機構であっても、従来のアナログ制御を使用している場合に近い応答性を実現することができる流体制御装置を提供する。
【解決手段】流体が流れる流路5上に設けられた流体制御バルブ2と、前記流体に関する物理量を測定する流体測定部1と、前記流体測定部で測定される物理量の測定値が、予め設定される設定値となるように前記流体制御バルブ2の開度を制御するバルブ制御機構4とを備えた流体制御装置100であって、前記バルブ制御機構4が、前記測定値と前記設定値の偏差に基づいてデジタル制御によって前記流体制御バルブ2の開度の操作量を演算する操作量演算部41と、アナログ制御によって位相遅れを補償する位相補償部42と、を備えた。
(もっと読む)
ロバスト性マップからのプロセスコントローラのためのチューニングパラメータの決定方法

【課題】プロセス制御システム内のプロセスコントローラのための、チューニングパラメータの決定方法を提供する。
【解決手段】まず、プロセス制御ループの応答をシミュレートし、オーバーシュート、振動、応答時間等を表示(ステップ120)し、ロバスト特性を示す特性図としてのロバスト性マップを生成(ステップ130)し、プロット(ステップ132)する。ロバスト性マップがユーザに安定領域を示すために表示されるので、ユーザはロバスト性マップ上の安定領域内の点を選択する。このようにして、選択されたロバスト特性を有する制御ループを生成する新たなチューニングパラメータのセットが決定される(ステップ136)。さらに、これらの新たなチューニングパラメータを使用して制御ループをシミュレート(ステップ138)し、結果として得られる性能特性をユーザが見ることを可能とする。
(もっと読む)
オートチューニング装置及びオートチューニング方法
【課題】カスケード接続されたPIDコントローラのPIDパラメータをオートチューニングにより求める。
【解決手段】スレーブ制御量に対して2位置制御を行い測定したリミットサイクル波形からスレーブコントローラ5のPIDパラメータを求め及びスレーブ側制御対象9を一次遅れ+むだ時間モデルで同定し、マスタ制御量に対して2位置制御を行い測定したリミットサイクル波形からマスタ側制御対象10を同定する。さらにスレーブ側をフィードバック制御したときの閉ループ伝達関数を求め、このスレーブ側閉ループ伝達関数を一次遅れ+むだ時間モデルで近似することによりマスタPIDコントローラ4のPID定数を算出する。
(もっと読む)
負荷イナーシャ推定方法及び制御パラメータ調整方法
【課題】負荷イナーシャ推定方法及び制御パラメータ調整方法を提供する。
【解決手段】負荷位置制御システムにおいて、フィードバック制御系21による負荷位置制御試験を実施して、特定の負荷位置θLで生じる第1の位置偏差Δθを測定し、負荷位置制御システムのモデルである負荷イナーシャ推定モデル60において、フィードバック制御系モデルによる送り系モデルの負荷位置制御シミュレーションを実施し、このときに前記特定の負荷位置で生じる第2の位置偏差Δθが、前記第1の位置偏差に等しくなるまで、送り系モデルに含まれている負荷イナーシャJLを調整して前記負荷位置制御シミュレーションを繰り返し、その結果、前記第2の位置偏差が、前記第1の位置偏差に等しくなれば、このときの送り系モデルの負荷イナーシャが実機の送り系の負荷イナーシャであると推定する。また、この推定した負荷イナーシャで逆特性モデル50の係数a3〜a5を設定する。
(もっと読む)
PID制御器の構成方法、プログラム及びシステム
【課題】プラントの事前情報が乏しく不安定系であっても、入力と出力が観測できれば準最適なロバストPID制御器を構成可能にする。
【解決手段】PID制御器の係数空間の中から、入出力データによって反証された組合せを除外して絞込みを行い、その係数候補群における各候補の評価関数履歴と全体での進化履歴の情報を共有させながら候補群を移動させ、同時に候補群近傍の係数空間探索を自動的に行いつつ、プラントと制御器の全体系におけるロバスト安定を実現する係数を非反証的に自動設計する機能を与える。各候補の評価関数履歴のうち最小となったPIDゲインと、候補群全体履歴のうち最小評価値になったPIDゲインの情報を記憶・共有しつつ、PSOにより、より良い中心を目指して候補群全体を移動させ、候補周辺探索と、その中からの反証候補除去を実行することで自動設計し、PSOによる候補群の各粒子の周辺探索候補に対しても非反証制御を行う。
(もっと読む)
オートチューニング実行装置および方法
【課題】マルチループ制御系において次にオートチューニングを実行すべき未実行ループを効率よく選択する。
【解決手段】オートチューニング実行装置は、制御ループ毎に設けられ、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、AT未実行の制御ループを記憶するAT未実行ループ登録部2と、制御ループ毎に設けられ、ループ間干渉により各制御ループに発生する制御量PVの最大変動量を検出する最大変動量検出部3と、所定の特定処理開始時点において最大変動量検出部3の検出結果とAT未実行ループ登録部2の登録内容とを参照して、最大変動量が規定条件以内でかつ最大になるAT未実行ループを特定する特定部4と、AT未実行ループが特定されたときにこの制御ループのAT実行部1に対してATを起動するよう指示するAT起動部5とを備えている。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】複数の制御系に関し、定常状態においてエネルギー使用量が指定された一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、複数の制御ループのヒータの電力使用量を規定する割当総電力の情報を受信する割当総電力入力部(10)と、各制御ループの消費電力値を取得する電力値取得部(11)と、消費電力値から各制御ループの電力余裕を算出し、電力余裕の総和に対する各制御ループの電力余裕の比率と割当総電力に基づいて各制御ループの操作量出力上限値を算出する電力抑制部(12〜18)と、制御ループ毎に設けられ、操作量を算出し、操作量の上限処理を実行して上限処理後の操作量を対応する制御ループのヒータに出力する制御部(19−i)とを備える。
(もっと読む)
PIDパラメータ調整支援装置および方法
【課題】ユーザがPIDパラメータ調整の行き詰まりに至る確率を低減する。
【解決手段】PIDパラメータ調整支援装置は、知識型の調整手法を実行してPIDパラメータの推奨値を探索する知識型調整部20と、分析型の調整手法を実行してPIDパラメータの推奨値を探索する分析型調整部21と、知識型調整部20と分析型調整部21とによるPIDパラメータの推奨値を提示する調整情報提示部3とを備える。
(もっと読む)
被処理物の熱処理装置
【課題】 制御の追従性と定常特性の向上を図ることができる被処理物の熱処理装置を提供する。
【解決手段】 被処理物を熱処理する熱処理炉4と、熱処理炉を制御するための複数の設定値と複数の制御部選択信号を出力するシーケンサ10と、熱処理炉の複数の制御量を制御するために構成されている複数の制御系ループとを備え、各制御系ループに、前記シーケンサからの設定値と前記熱処理炉からの制御量とに基づいて操作量を出力する複数の制御部と、複数の制御部から出力される操作量のうち1つをシーケンサ10からの制御部選択信号に従って選択して熱処理炉4に出力する切替器3−1,3−2,3−3とをそれぞれ備えた被処理物の熱処理装置において、シーケンサ10は、複数の制御系ループの制御構成の切替をそれぞれ独立して行うための手段を有する。
(もっと読む)
プログラム調節計
【課題】複数台のプログラム調節計を並列運転するのにあたり、比較的安価な構成で、プログラムパターンの進行についてセグメント単位で同期をとることができるプログラム調節計を提供すること。
【解決手段】複数のセグメントに分割された時間の経過に応じて目標設定値が変化するように作成された所定の制御プログラムパターンに基づき制御対象を制御するプログラム調節計において、他のプログラム調節計の運転状態を監視する監視手段を設け、いずれかのプログラム調節計がセグメントにおける目標設定値の変化に追従できない場合には次のセグメントへの移行を遅らせることを特徴とするもの。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
外乱抑制荷重制御装置
【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
制御システム
【課題】非干渉化器を作動させた状態で、実運転させて昇温させた場合に、制御対象の温度が低い領域では干渉を見越して操作量を少なくするようにフィードバックが作用するので、投入熱量が抑制されてしまう。その結果、実運転開始から目標温度までの昇温に時間がかかるため、昇温までの時間の短縮化を図る。
【解決手段】複数の制御手段と制御対象との間に、各制御量において、一方の制御量が他方の制御量に与える影響をなくすか低減するように処理する非干渉化手段を備え、非干渉化手段として、補償要素3bと減算器3dとの間の減算器側ラインおよび補償要素3bと加算器3cとの間の加算器側ラインに、補償要素3bからのフィードバック量を可変するフィードバック量可変手段3h3,3h4を備えた。
(もっと読む)
圧力制御装置及び圧力制御方法
【課題】サーボモータにより動力伝達手段を介して作動体を動作させて受圧体に与える力を、ロードセル等を使わずに正確に制御し、機械の構成を簡単にし、信頼性を得る。
【解決手段】サーボモータ11により射出圧力を制御する電動射出成形機1の制御装置15は、電動射出成形機1の制御モデルに対して構築され射出スクリュー5が発生する力を推定するオブザーバ19と、サーボモータ11に対する電流指令値Iとパルスエンコーダ14の回転位置θとによりオブザーバ19が推定した力を入力して射出スクリュー5に作用させる力をフィードバック制御する射出圧力フィードバック制御部20とを備え、オブザーバ19は、電流指令として重畳させた振動に応じて生じる抗力が、機械インピーダンス要素を介して被駆動部に作用する力を外乱として同定した制御モデルに基づいて構成される外乱オブザーバ部を備え、被駆動部に作用する力を推定する。
(もっと読む)
位置制御装置
【課題】位置検出にインクリメンタルタイプのパルスエンコーダを使用すると、低速領域ではパルスが発生しなくなるため、低速領域では大きな速度変動が発生する。
【解決手段】位置制御装置のマイナーループに速度制御を持たない位置制御とし、
この位置制御部をPID制御器とし、入力θrefと出力θdet比のPID制御器の伝達関数を次式で求めた後、位置制御部のパラメータKPθ、KIθ、KDθを求めたものである。
θdet/θref=(KDθs2+KPθs+KIθ)/{Jdys3+(KDθ+Ddy)s2+KPθs+KIθ}
(ただし、KPθは比例要素、KIθは積分要素、KDθは微分要素、Jdyはモータ慣性、Ddyは回転損失、sはラプラス演算子)
(もっと読む)
フィードフォワード制御装置およびフィードフォワード制御方法
【課題】制御回路の構成を複雑化させることなく、変化量演算の取り扱いを容易化したフィードフォワード制御装置およびフィードフォワード制御方法を提供する。
【解決手段】フィードフォワード制御装置50Aは、あるプロセス量を指標にして先行要素の量を決定するフィードフォワード制御部21Aを具備し、フィードフォワード制御部21Aは、現在のプロセス量を入力し、サンプリング周期毎に逐次記憶する記憶部を有し、この記憶部に記憶された過去のプロセス量を入力時から所定時間経過時に出力するサンプリング遅延器51aと、サンプリング遅延器51aに入力される現在のプロセス量と記憶部に記憶された過去のプロセス量とから所定時間で変化したプロセス量の変化分を算出する減算器24とを備え、先行要素の量を減算器24で算出されたプロセス量の変化分に基づいて調整するように構成される。
(もっと読む)
適応制御装置
【課題】負荷変化や制御対象の特性変化に対しても即応でき、より優れた応答特性を実現し得る適応制御装置を提供する。
【解決手段】ループゲイン調節器7、適応制御器5およびPI制御器3を有し、制御偏差ea(t)を自乗する乗算器16と、乗算器16の出力を入力とする1次遅れ要素17と、を備えた適応制御器5の可変ゲイン演算部11において、制御偏差ea(t)の変動傾きが負のときの1次遅れ要素17の時定数を制御偏差ea(t)の変動傾きが一定または正のときの1次遅れ要素17の時定数よりも大きい値に設定する。
(もっと読む)
自動チューナおよび制御要素をチューニングする方法
【課題】分散化制御機能を有するプロセス制御ネットワーク内で制御要素をチューニングするのに用いられる自動チューナを提供する。
【解決手段】自動チューナは、制御要素62が動作している第1のフィールド装置44内に位置した第1のチューニング要素66と、通信ネットワークによって第1の装置と通信する異なる装置14内に位置する第2のチューニング要素71とを含む。第1のチューニング要素は、自動チューニング手続きの間にデータを集め、プロセス特性を決定し、通信ネットワークによって、決定されたプロセス特性を第2のチューニング要素に伝える。第2のチューニング要素は、送信されたプロセス特性に基づいて制御要素のための新しいチューニングパラメータを決定し、通信ネットワークによって、これを制御要素に送り、それにより、制御要素を再チューニングする。
(もっと読む)
印刷装置およびゲイン補正方法
【課題】特定の制御対象について、速度変動を抑えた安定した動作を実現することが困難であった。
【解決手段】制御対象を駆動するモーターと、当該制御対象の速度を検出し、当該検出した速度と当該制御対象の目標速度との差に基づいて当該モーターの駆動をPID制御する制御部とを備える印刷装置であって、上記制御部は、上記モーターを駆動させることにより特定の制御対象を動作させた所定期間における当該特定の制御対象の速度変動量を取得し、上記PID制御のための所定の定数を、当該速度変動量に基づいて求めた補正比率に応じて補正するゲイン演算部を備える構成とした。
(もっと読む)
フィードバック制御装置とフィードバック制御方法
【課題】むだ時間を含む制御対象に対して、安定して制御を行うことができ、かつ、制御量の応答性が良好となるフィードバック制御装置と、フィードバック制御の制御方法とを提供する。
【解決手段】制御量を検出する検出手段と、むだ時間を除いた制御対象の伝達関数の逆モデルに、制御量を入力して、第一出力値を得る第一出力値計算手段と、操作量から、第一出力値を減算して、第二出力値を得る第二出力値計算手段と、むだ時間を除いた前記制御対象の伝達関数に、第二出力値を入力して、第三出力値を得る第三出力値計算手段と、目標値から、制御量を減算して、制御偏差を得る制御偏差計算手段と、制御偏差から、第三出力値を減算して、補正された制御偏差を得る制御偏差補正手段と、補正された制御偏差を入力して、操作量を得るPID制御器と、を具備するものである。
(もっと読む)
21 - 40 / 209
[ Back to top ]