
Fターム[5H004LA18]の内容
フィードバック制御一般 (10,654) | 制御対象の特性 (738) | 複数の操作端を有するもの (70)
Fターム[5H004LA18]の下位に属するFターム
操作端を切り換えるもの (8)
Fターム[5H004LA18]に分類される特許
1 - 20 / 62
プラント制御装置、プラント制御方法およびプログラム
【課題】複数の操作端毎の位置指令信号値の間に差が生じた場合でも、速度型PID演算部からの自動制御を継続しつつ、複数の操作端毎の位置指令信号値間の偏差を自動的に解消する。
【解決手段】速度型PID演算手段と複数の積分演算手段と複数の上書き手段と自動バランス手段とを持つ。前記速度型PID演算手段は、偏差信号からPID演算を行い、偏差に応じた速度型の操作量指令信号を生成する。前記積分演算手段は、前記操作量指令信号に基づいて各操作端用の規定された操作端位置指令信号を生成する。前記複数の上書き手段は、各操作端用の追加の位置指令信号を生成し、対応する積分演算手段に上書き処理を行って操作端位置指令信号を新たに規定する。前記自動バランス手段は、前記規定された操作端位置指令信号間の偏差を算出し、その算出結果に基づいて前記操作量指令信号を補正し、補正された操作量指令信号を前記積分演算手段に与える。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法

【課題】ステップ応答制御においてエネルギー使用量が一定値を大幅に超えないように、かつ設定値への追従特性が損なわれないようにする。
【解決手段】電力総和抑制制御装置は、各制御ループの操作量を特定の値にした場合の昇温時間を推定する昇温時間推定部(12)と、各制御ループの制御量を昇温時間の間に設定値変更に応じた量だけ変化させるのに必要な出力を推定し、使用電力総量が割当総電力を超えない必要出力を各制御ループの操作量出力上限値とする電力抑制部(16〜18)と、昇温時間が最大限度時間以内でない場合に、各制御ループの必要出力を、各制御ループの制御量を最大限度時間の間に設定値変更に応じた量だけ変化させるのに必要な操作量として計算し直し、この必要出力を各制御ループの操作量出力上限値として再設定する補正設定部(21)と、制御部(23−i)とを備える。
(もっと読む)
出力制御方法および出力制御装置
【課題】位相制御器を用いずに、分解能を低下させることなく、オン/オフされる操作対象の出力を平滑化することができる、出力制御方法および出力制御装置を提供する。
【解決手段】まず、一定の制御周期Ts内にリレーをオンさせるオン信号を出力するオン期間Tsonおよびリレーをオフさせるオフ信号を出力するオフ期間Tsoffが設定される。次に、制御周期Tsに対するオン期間Tsonの割合Msおよびリレーに向けて出力可能な最小のパルス幅である出力最小期間dTsに基づいて、制御周期Ts内に複数の小時分割周期Tssが設定される。そして、各小時分割周期Tssにおいて、制御周期Tsに対するオン期間Tsonの割合Msに応じた期間にわたって、リレーに向けてオン信号が出力され、残りの期間にわたって、リレーに向けてオフ信号が出力される。
(もっと読む)
制御装置および方法
【課題】瞬間総エネルギーが一定値を超えないように、かつ温度のオーバーシュートの発生を抑制できる確率が高くなるようにする。
【解決手段】制御装置は、各制御ループLiの昇温電力量PWiを予測する昇温電力量予測部3と、昇温電力量PWiが大きい方から小さい方への順序を各制御ループLiの昇温実行順序として決定する昇温実行順序決定部4と、最初の昇温開始のとき、あるいは昇温対象の制御ループの昇温が進むことにより操作量が下降して電力余裕が生じたと判断されるときに、昇温実行順序に従って昇温対象の制御ループを選択する昇温対象選択部5と、各制御ループLiのヒータに供給する電力の制限操作を行なう電力制限操作部6と、制御ループLi毎に設けられた制御部7−iとから構成される。
(もっと読む)
プラントの制御装置
【課題】プラントのプロセスの時間因子に起因する操作変数間の相互作用を考慮し、その影響が最小となるような操作変数間の操作手順を自動演算する。
【解決手段】複数のロジック演算に使用する操作変数を保存する制御ロジックデータベースと、ロジック演算を実行しプラントに与える複数の制御信号を生成する制御信号生成部と、操作変数の操作手順を演算する操作手順演算部を備え、操作手順演算部は、複数の操作変数のうち、互いに関連する操作変数について、第1の操作変数のロジック演算結果と第2の操作変数が加味されるまでの間のロジック演算における遅れ時間を操作変数毎に求めて、複数の操作変数の操作手順を決定する。制御信号生成部は、複数のロジック演算で使用する操作変数の大きさを変更するとき、この操作変数に関連する他の操作変数の変更順序を操作手順演算部で求めた複数の操作変数の操作手順に従って実行する。
(もっと読む)
制御装置および方法
【課題】設定値変更時において制御手段とそれ以外の手段との間で行われる信号伝達の頻度を減らしつつ、各制御ループの制御量が設定値に達する時間がほぼ同じになるようにする。
【解決手段】制御装置は、複数の制御ループLiの設定値SPiが変更されたとき、各制御ループLiの操作量出力上限値OHiを規定出力上限値MOiにしたときに各制御ループLiの制御量PViが設定値SPiまで達するのに必要な昇温時間TLを推定する昇温時間推定部1と、昇温時間TLで制御量PViが設定値SPiまで達するのに必要な操作量出力MUiを制御ループLi毎に推定する必要出力推定部2と、操作量出力MUiを各制御ループLiの操作量出力上限値OHiとして一時的に設定する出力上限設定部3と、制御ループLi毎に設けられた制御部5−iとから構成される。
(もっと読む)
位置制御装置の制御パラメータ調整方法及び制御パラメータ調整システム
【課題】複数の駆動系が駆動時に互いに摩擦力を及ぼし合う関係にある位置制御装置の制御パラメータを調整する作業を簡単化する。
【解決手段】位置制御装置28により2つの駆動系のモータ16,24を同時に駆動して各駆動系の位置決めデータを採取し、遺伝的アルゴリズムを用いて各駆動系の位置決めデータの特徴量を評価して、その評価値が要求性能(設計仕様)を満足するように位置制御装置28の制御パラメータを調整する。この際、各駆動系の位置決めデータとして、位置指令波形、実位置波形及びトルク波形を採取し、各駆動系の位置決めデータの特徴量として位置決め波形を評価するようにすると良い。また、調整対象となる制御パラメータは、例えば、位置指令パラメータ、フィードバックゲインパラメータ及びフィードフォワードゲインパラメータである。
(もっと読む)
プロセス制御システム
【課題】分散型制御装置による制御からに多変数モデル予測制御装置による制御への切り替えを、1制御周期の欠落もなく実行することができるプロセス制御システムを実現する。
【解決手段】プロセス出力値を共通に入力する分散型制御装置と多変数モデル予測制御装置とを、双方のステータス変更操作により切り替える機能を有し、分散型制御装置が稼動するスタンドバイモードのステータスから多変数モデル予測制御装置が稼動するコントロールモードのステータスに切り替える際に、多変数モデル予測制御装置は、所定の制御周期で分散型制御装置と多変数モデル予測制御装置に設定されているステータスの読み込み処理と、双方のステータスをコントロールモードに一致させるステータス等値化処理と、プロセスの制御演算処理と、演算結果を分散型制御装置側に渡す書き込み処理とを制御周期の期間中に少なくとも1回の追加ステータス等値化処理を実行する。
(もっと読む)
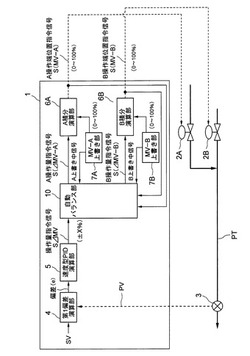
液体流量制御装置、液体流量制御方法、基板処理装置および記憶媒体
【課題】液体流量制御装置の制御可能総流量範囲を広くすること。
【解決手段】第1の流量制御ユニット21Aは、小流量の第1の制御可能流量範囲を有する第1の流量制御弁23Aを有しており、第2の流量制御ユニット21Bは、大流量の第2の制御流量範囲を有する第2の流量制御弁23Bを有しており、第1および第2の制御流量範囲には重複範囲がある。総流量の要求値の変化に応じて、第1および第2の流量制御ユニットの一方または両方に液体が流れる。第1および第2の流量制御ユニットを流れる液体の合計流量を増大させてゆく過程においては、第1および第2の流量制御ユニットの一方を流れる流量を固定しつつ他方を流れる流量を増大させる。
(もっと読む)
オートチューニング実行装置および方法
【課題】マルチループ制御系において次にオートチューニングを実行すべき未実行ループを効率よく選択する。
【解決手段】オートチューニング実行装置は、制御ループ毎に設けられ、リミットサイクル方式のオートチューニング(AT)を実行するAT実行部1と、AT未実行の制御ループを記憶するAT未実行ループ登録部2と、制御ループ毎に設けられ、ループ間干渉により各制御ループに発生する制御量PVの最大変動量を検出する最大変動量検出部3と、所定の特定処理開始時点において最大変動量検出部3の検出結果とAT未実行ループ登録部2の登録内容とを参照して、最大変動量が規定条件以内でかつ最大になるAT未実行ループを特定する特定部4と、AT未実行ループが特定されたときにこの制御ループのAT実行部1に対してATを起動するよう指示するAT起動部5とを備えている。
(もっと読む)
省エネルギー余裕算出装置、省エネルギー総余裕算出装置および方法
【課題】マルチループ温度制御系において最遅同調制御を適用することを想定した省エネルギー余裕分を概算で見積もる。
【解決手段】省エネルギー余裕算出装置は、昇温前の操作量MVLを取得する低温時操作量取得部1と、昇温完了後の温度で待機中の操作量MVHを取得する高温時操作量取得部2と、最遅制御ループ以外の制御ループの昇温完了から最遅制御ループの昇温完了までの、最遅制御ループ以外の制御ループの待機時間THを計測する待機時間計測部3と、ヒータ容量に関する情報HPを記憶するヒータ容量記憶部4と、待機時間THとヒータ容量HPと操作量MVHと操作量MVLとから最遅制御ループ以外の制御ループの省エネルギー余裕ESを算出する省エネルギー余裕算出部5とを備えている。
(もっと読む)
送水温度制御装置および方法
【課題】使用するエネルギーの種別が異なる機器が混在する熱源システムにおいて、省エネを図りつつ、エネルギーを使用する場合に適用される各種の規制を回避する。
【解決手段】例えば、所定の判断基準を「現在の時刻がピーク時間帯に入っているか否か」とし、現在の時刻がピーク時間帯に入っていない場合には(ステップS104のNO)、ガス式の冷凍機(低COP機)を緩和優先機、電気式の冷凍機(高COP機)を緩和後回し機とし(ステップS105)、現在の時刻がピーク時間帯に入っている場合には(ステップS104のYES)、電気式の冷凍機(高COP機)を緩和優先機、ガス式の冷凍機(低COP機)を緩和後回し機とする。
(もっと読む)
送水温度制御装置および方法
【課題】単位生成熱量あたりのエネルギーコストが大きい機器と単位生成熱量あたりのエネルギーコストが小さい機器が混在する熱源システムにおいて、合計のエネルギーコストを低減させ、さらなる省エネを図る。
【解決手段】設定送水温度TSspの緩和に際して、単位生成熱量あたりのエネルギーコストが小さい機器よりも単位生成熱量あたりのエネルギーコストが大きい機器を優先させて、その機器の冷温水の出口温度の設定値を緩和する。例えば、冷凍機1−1を低COP機(単位生成熱量あたりのエネルギーコスト大)、冷凍機1−2を高COP機(単位生成熱量あたりのエネルギーコスト小)とした場合、冷凍機1−2(高COP機)の冷水の出口温度の設定値TS2spよりも、冷凍機1−1(低COP機)の冷水の出口温度の設定値TS1spを優先させて、緩和する。
(もっと読む)
エネルギー総和抑制制御装置、電力総和抑制制御装置および方法
【課題】複数の制御系に関し、定常状態においてエネルギー使用量が指定された一定値を超えないように、かつ外乱抑制特性が可能な限り損なわれないように、制御を行う。
【解決手段】電力総和抑制制御装置は、複数の制御ループのヒータの電力使用量を規定する割当総電力の情報を受信する割当総電力入力部(10)と、各制御ループの消費電力値を取得する電力値取得部(11)と、消費電力値から各制御ループの電力余裕を算出し、電力余裕の総和に対する各制御ループの電力余裕の比率と割当総電力に基づいて各制御ループの操作量出力上限値を算出する電力抑制部(12〜18)と、制御ループ毎に設けられ、操作量を算出し、操作量の上限処理を実行して上限処理後の操作量を対応する制御ループのヒータに出力する制御部(19−i)とを備える。
(もっと読む)
PWM制御により双方向サーボアクチュエータを制御するためのシステム、方法、及び装置
【課題】タービンに多数の弁がある場合、タービンのサーボコントローラは、極めてかさばったものとなる可能性があるとともに、駆動エネルギーが線形駆動回路を通じて熱に変換される場合には、エネルギー効率が低下し、制御盤の全体的な温度を上げるのを解決する。
【解決手段】方向制御信号を受信するステップと、少なくとも方向制御信号に基づいてアクチュエータを通るスイッチング可能な正電流経路及びスイッチング可能な負電流経路を確立するようにデバイスを操作するステップと、アクチュエータに関連付けられた電流に少なくとも基づいてフィードバックを送るステップと、そのフィードバックに少なくとも基づいて電流を制御するステップとを含むことができる。この方法は、パルス幅変調制御を介してアクチュエータを通る少なくとも1つの正電流経路及び少なくとも1つの負電流経路を確立するように1つ又は複数のデバイスを操作するステップを含む。
(もっと読む)
外乱抑制荷重制御装置
【課題】リニアモータ併用シリンダから出力される実測荷重値を目標荷重値に良好に追従させて外乱に対する応答性を高めるとともに、リニアモータの発熱を抑えることができる外乱抑制荷重制御装置を提供すること。
【解決手段】リニアモータ併用シリンダ荷重制御部は、リニアモータ併用シリンダの目標荷重値信号と実測荷重値信号の差分信号からエアシリンダ装置の目標荷重値信号に対する追従特性が優れた低周波数帯域を取り出して、この低周波差分信号に基づいてエアシリンダ装置にエアシリンダ装置用最適荷重付加指示信号を送るエアシリンダ装置荷重制御部;及び上記差分信号からリニアモータの目標荷重値信号に対する追従特性が優れた高周波数帯域を取り出して、この高周波差分信号に基づいてリニアモータにリニアモータ用最適荷重付加指示信号を送るリニアモータ荷重制御部;を有する。
(もっと読む)
制御システム
【課題】非干渉化器を作動させた状態で、実運転させて昇温させた場合に、制御対象の温度が低い領域では干渉を見越して操作量を少なくするようにフィードバックが作用するので、投入熱量が抑制されてしまう。その結果、実運転開始から目標温度までの昇温に時間がかかるため、昇温までの時間の短縮化を図る。
【解決手段】複数の制御手段と制御対象との間に、各制御量において、一方の制御量が他方の制御量に与える影響をなくすか低減するように処理する非干渉化手段を備え、非干渉化手段として、補償要素3bと減算器3dとの間の減算器側ラインおよび補償要素3bと加算器3cとの間の加算器側ラインに、補償要素3bからのフィードバック量を可変するフィードバック量可変手段3h3,3h4を備えた。
(もっと読む)
熱処理装置の温度制御方法
【課題】高精度で且つ制御性能が高い温度制御を行うことができる熱処理装置の温度制御方法を提供する。
【解決手段】第1のPID演算要素と第2のPID演算要素とでカスケード制御を行う温度コントローラを有する熱処理装置の温度制御方法において、第1のPID演算要素の第1の操作量の上下限判定範囲を、炉内温度が目標値に一致しているときの該第1の操作量の値を基準に正負両側に略同じ値である範囲とし、かつ第1のPID演算要素で計算された第1の操作量がその上限値を超えたと判定されたときは該第1の操作量が前記上下限判定範囲の上限値になる分だけ前記第1のPID演算要素の積分操作量を増加させ、その下限値を下回ったと判定されたときは該第1の操作量が前記上下限判定範囲の下限値になる分だけ積分操作量を減少させる。
(もっと読む)
除振システム、除振方法及びプログラム
【課題】多入力多出力を扱え、かつ非振動的な除振制御が可能であり、システム変動に頑強な制御を実現する。
【解決手段】搭載物が載置される定盤1を駆動する複数の駆動部3bに対応して配置された複数のセンサ3aにより、定盤1の状態量を計測する。次に、定盤1についての複数の状態量及び定盤1の運動方程式に基づいて、スライディングモード制御により、該当する駆動部3bに対する制御量を作成し、出力する。
またカルマンフィルタ9をさらに備え、制御部は、複数のセンサ3aのうち一部のセンサから取得した状態量をカルマンフィルタ9に入力し、カルマンフィルタ9で推定された他の状態量と一部のセンサから取得した状態量及び定盤1の運動方程式に基づいて、該当する駆動部に対する制御量を算出することが好適である。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
1 - 20 / 62
[ Back to top ]