
Fターム[5H105EE06]の内容
電気的推進車両の集電装置 (4,133) | 集電部支持装置 (543) | 集電部支持装置の構造及び型式 (527) | 昇降、伸縮、折り畳み、押圧のための構造 (99)
Fターム[5H105EE06]の下位に属するFターム
機械的バネによるもの (34)
流体圧によるもの (13)
可変の設定、調節機能を有するもの (26)
Fターム[5H105EE06]に分類される特許
1 - 20 / 26
車両用パンタグラフの押上力調整機構
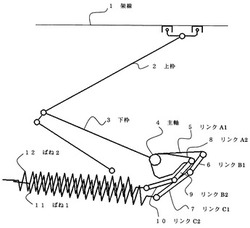
【課題】低コストで調整の容易で良好な押上力の水平特性が得られる車両用パンタグラフの押上力発生機構を提供する事である
【解決手段】主軸に複数のばねでリンクを介してモーメントを与えて押上力を発生させる車両用パンタグラフ集電装置において、該複数のばねがそれぞれ異なった位相、寸法の1つ又は複数の該リンクを介して該主軸と結合されることを特徴とする。良好な押上力の水平特性が得られることを最も主要な特徴とする。この押上力発生機構は、リンク数×ばね数の段階分モーメント半径を調整することが可能となり、良好な押上力の水平特性が得られる。
(もっと読む)
集電装置付運搬車両

【課題】運搬車両に鉱石等の荷物の積載又は排土にあたり集電装置の破損を抑制する集電装置付運搬車両を提供する。
【解決手段】集電装置付運搬車両であるダンプトラック1は、荷物を積載するベッセル5と、延伸して架線から電力を受け、縮退してベッセル5の下方に配置されるパンタグラフ7と、パンタグラフ7からの電力と、自走駆動源と、の少なくとも1つにより駆動輪32を回転駆動とし、ベッセル5を載置する車両本体3と、を含んでいる。
(もっと読む)
集電装置付運搬車両
【課題】架線からの集電にあたり集電装置の破損を抑制する集電装置付運搬車両を提供する。
【解決手段】集電装置付運搬車両であるダンプトラック1は、荷物を積載するベッセル5と、延伸して架線8から電力を受け、縮退して架線8から離隔配置するパンタグラフ7と、パンタグラフ7からの電力と、自走駆動源と、の少なくとも1つにより駆動輪32を回転駆動し、ベッセル5を載置する車両本体3と、パンタグラフ7と架線8との相対位置を検出するパンタグラフ位置検出器91と、パンタグラフ7と架線8とが接続される位置となるように車両本体3の走行方向を制御し、又は、車両本体3の操作すべき方向が認識できる情報を指示する制御装置と、を含む。
(もっと読む)
鉄道車両用集電装置
【課題】操舵台車への集電装置の装荷を可能としつつ、集電靴の動作範囲とエンドアプローチの高さを大きくとることがないようにする。
【解決手段】第3軌条に集電靴を接触させて鉄道車両に電気を取り込む鉄道車両用集電装置16である。集電装置16を、台車枠12との間に軸ばね13を介在させた状態で、鉄道車両の台車枠12との相対変位が可能なように支持部14によって支持した軸箱11の一つに、鉛直方向の弾性係数が鉛直以外の方向の弾性係数に比べて小さい防振ゴム17を介して装荷する。
【効果】前後の軸箱間隔が曲線区間で大きく変化する操舵台車に集電装置を装荷した場合においても、軸箱に集電装置を保持することができるので、集電靴の動作範囲とエンドアプローチの高さ範囲を広くとる必要がなくなる。
(もっと読む)
接触力制御方法及び接触力制御装置
【課題】電車線路の摩耗を低減させる新しい技術を提案すること。
【解決手段】パンタグラフ2にすり板13とトロリ線14との接触力Fを計測する接触力計測部20を設ける。接触力制御装置30は、計測された接触力Fが予め設定された閾値Fth以下になった場合に、エアスプリング制御装置16へエアスプリング12に接触力Fを増加させる制御をさせる指令を出す。閾値Fthには、すり板13とトロリ線14とが離線する前の比較的弱い接触力条件で最もトロリ線14が摩耗する接触力領域を上回る接触力値が設定される。
(もっと読む)
電気自動車の充電システム
【課題】設備費用が安価で、急速充電が可能な電気自動車の充電システムを提供する。
【解決手段】電気鉄道用の電力供給系統のき電線5からの直流電力で、電気自動車10に搭載された動力用の蓄電装置11を充電する。ここに、き電線5と蓄電装置11とは、充電ステーション2に設けられた給電端子26と電気自動車に取り付けられた受電端子部22とを電気的に接続することにより、接続される。
(もっと読む)
パンタグラフ用舟体及びそれを有するパンタグラフ
【課題】 パンタグラフからすり板体が外れた後も、安全に走行できるように改良された舟体を提供する。
【解決手段】 舟体20は、底板21、前後の長側板22、左右の短側板23、及び、左右の補助すり板24を有する。舟体20の上面には、左右補助すり板24の内端面24aと、前後長側板22の上端面とで囲まれる、左右方向に長い凹部S(はめ込み部)が形成される。すり板体10はこの凹部Sに保持されている。左右補助すり板24の内端面24aは、外側上向きのテーパ状となっている。これにより、万一すり板体10が舟体20から外れてトロリ線が舟体20のはめ込み部S内を摺動せざるを得なくなった場合に、トロリ線ははめ込み部Sのテーパ状端部24aに沿ってはめ込み部の外方向へ案内される。
(もっと読む)
パンタグラフのアクティブ制御におけるアクチュエータの摩擦の影響を低減する方法及びパンタグラフ
【課題】 パンタグラフのアクティブ制御において、アクチュエータの摩擦の影響を低減する方法を提供する。
【解決手段】 本発明のパンタグラフ1は、架線Tと摺り板10との間の上下方向接触力を動的に制御するアクチュエータ50を備える。さらに、枠組み20の変位を計測する変位計55を備える。変位計55で計測した枠組み20の変位の変化率を用いてアクチュエータ50の摩擦力を想定し、想定した摩擦力と反対方向の力を付加するように制御することによって、アクチュエータ50の摩擦の影響をキャンセルする。このため、アクティブ制御の精度が向上し、トロリ線とパンタグラフとの間に作用する接触力の変動をより効果的に低減できる。
(もっと読む)
車両用共鳴型非接触給電システム
【課題】車高調整機能を備えた電動車両に対して非接触給電を行うときに、車高調整機能を利用して給電側から電力を効率良く受電側に供給することができる状態にすることができる車両用共鳴型非接触給電システムを提供する。
【解決手段】車両用共鳴型非接触給電システムは、高周波電源11及び1次側共鳴コイル12bを備えた給電側設備10と、1次側共鳴コイル12bからの電力を受電する2次側共鳴コイル21bを備えた受電設備20及び車高調整装置31を搭載した電動車両30とを備えている。受電設備20は、2次側共鳴コイルが受電した電力を整流する整流器24、整流器24により整流された電力が供給される2次電池26を備えている。制御装置27は、2次電池26の充電時に、車高調整装置31を使用して1次側共鳴コイル12b及び2次側共鳴コイル21bを含む共鳴系のインピーダンス調整を行う。
(もっと読む)
接触力制御方法及び接触力制御装置、並びに、集電装置における接触力制御方法及び接触力制御装置
【課題】 電気車両に電車線から摺動集電部材を介して集電する集電装置における接触力の制御装置であって、接触力を直接測定しなくても高い周波数まで接触力の制御が可能な接触力制御装置などを提供する。
【解決手段】 集電装置の接触力制御装置20は、摺動集電部材13を電車線3に押し当てるアクチュエータ21と、アクチュエータ21への入力電流を測定する電流計23と、アクチュエータ21の出力変位を測定するセンサ25と、アクチュエータ21の駆動回路27と、電流計23及びセンサ25の測定値が入力されるとともに、アクチュエータ駆動回路27を制御する制御部30と、を備える。制御部30は、接触力の指令値を設定する設定部、センサの計測値から接触力の実際の値を推定する推定部、及び、現在における接触力指令値と推定値とを比較し、後者を前者に合わせるようにアクチュエータ駆動回路27を制御するアクチュエータ制御部、を有する。
(もっと読む)
陸上車両により一時的に又は連続的に駆動用の又は補助的な電気エネルギーを集電する上方側面部分の集電構造
トロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置
【課題】
装置高さが低くかつ小型化が可能なトロリ線摩耗量検出光学系およびトロリ線摩耗量測定装置を提供することにある。
【解決手段】
この発明は、レール横断方向に配列された単色光光源複数個によりスリット状の投光光を生成してトロリ線の摺動面に照射する投光ユニットと、第1の受光器、単色光の波長範囲を除去するフィルタを介してトロリ線からの反射光を受ける第2の受光器とを設け、2つの受光器の受光信号の差により摺動面についての検出信号を得るものである。
(もっと読む)
パンタグラフ
【課題】 アクティブ方式のパンタグラフにおいて、アクチュエータに著大な出力が働いたような場合でもトロリ線を保護できる対策を備えたパンタグラフを提供する。
【解決手段】 パンタグラフは、トロリ線に押し当てられる舟体を支持する枠組と、枠組を付勢して舟体を上昇させる主バネと、枠組を回転駆動させて、舟体のトロリ線に対する押上力を制御するアクチュエータ50と、を具備する。アクチュエータ50の先端51は、枠組に接続する連結部材53の基端が接続するブラケット60に、ピン61で回転可能に接続されている。ピン61の外周面には複数のノッチ61aが形成されており、所定の荷重を受けると破断する。アクチュエータ50の著大な出力が働くとピン61が破断し、アクチュエータ50は台枠3に設置された受部54に落下して、アクチュエータ50の作動を停止する。これにより、舟体は主バネのみで支持される。
(もっと読む)
集電器及びエネルギー伝達システム
本発明は、移動方向(F)またはその反対方向で導体線(5)に沿って移動可能な移動装置(2)を備えており、導体線(5)のガイド要素(9)に沿ってガイドする集電架線車(8)を備えた集電器(1)並びにエネルギー伝達システムに関係する。本発明は、集電器とエネルギー伝達システムを利用する際の問題を解決し、集電器を導体線に沿って移動させる際のエネルギー節約、接触改善、および損傷回避および集電架線車の導体線への簡単な接続を可能にする。集電架線車(8)と移動装置(2)との間に配置されており、第1駆動レバーアーム(13L)を備えた少なくとも1つの第1レバー構造体(12L)が利用され、その第1端は、移動装置(2)に回転式に接続されており、その第2端は、少なくとも1つの第1引張レバーアーム(14L)の第2端に回転式に接続されており、その第1端は、集電架線車(8)に回転式に接続されており、集電架線車(8)を移動装置(2)上の引込位置と、移動装置(2)から離れた延伸位置との間で移動させるために第1調整ドライブ(15L)が利用され、移動装置(2)が移動方向(F)に移動されるとき第1駆動レバーアーム(13L)を所定の延伸位置でロックするために第1ロック装置(16、18L、15L)が利用される。 (もっと読む)
車両用集電舟
【課題】簡単な構造によって、車両の走行速度に応じた適正な揚力に調整できる車両用パンタグラフの集電舟を提供することである。
【解決手段】架線に接触させて集電するためのすり板と、その下面を支持する舟体枠を有し、その舟体枠に走行風による抗力の大きさに応じて変形する弾性体を設け、その弾性体の変形により集電舟の断面形状が変化することで、あるいは 前記舟体枠に弾性支持した剛体を取り付け、走行風による抗力の大きさに応じてその剛体が変位して集電舟の断面形状が変化することで揚力を調整する機構を有する。車両速度に応じた揚力が得られるよう集電舟の形状を調整する。車両の走行速度が変わっても適正な揚力に調整でき、低コストである。
(もっと読む)
電気車両及び関連する輸送システム
【課題】所定の進行方向に進行するように構成された電気車両を提供する。
【解決手段】本発明は、a)電気駆動手段(13)と、b)前記駆動手段(13)に電力供給するための少なくとも1つの第1集電舟(11)と、c)少なくとも1つの第1送信機(18)とを具備した電気車両(4)に関する。前記第1集電舟(11)は、0.2メートル以上の第1距離(D1)によって、前記第1送信機(18)から分離され、かつ、前記第1送信機(18)は、車両の進行方向(F1)で、前記第1集電舟(11)の前に配置されている。また、本発明は、関連する輸送システムに関する。
(もっと読む)
パンタグラフ用電源供給装置
【課題】パンタグラフ及び車体間に碍子を用いて車体側からパンタグラフに電力を供給することなく、パンタグラフに電力を供給することができるパンタグラフ用電源供給装置をを提供する。
【解決手段】本発明のパンタグラフ用電源供給装置は、交流き電方式において、架線からパンタグラフの舟体を介して集電される電力を、パンタグラフから該鉄道車両の電源装置に主導体を介して供給する構成において、主導体からパンタグラフ内の電気回路にて用いる電力を得る、パンタグラフに設けられるパンタグラフ用電源供給装置であり、主導体に1次側が取り付けられた変流器と、変流器の2次側に生起される交流電流から直流電圧を生成する電源回路と
を有する。
(もっと読む)
パンタグラフ及びパンタグラフの追随特性向上方法
【課題】パンタグラフの複雑化を引き起こすことなく広範な車両走行速度域において集電摺動部のトロリ線への追随特性を向上したパンタグラフ等を提供する。
【解決手段】トロリ線Tに接触する集電摺動部10と、集電摺動部10を車体に対し変位可能に支持する支持機構30と、支持機構30に設けられたバネ定数を変更可能な可変磁気バネ要素100と、車両の走行時にトロリ線Tが集電摺動部10を加振する卓越周波数に応じて可変磁気バネ要素100のバネ定数を変更する制御手段とを備える構成とする。
(もっと読む)
パンタグラフの接触力調整方法及びパンタグラフ
【課題】舟体(摺り板を含む)とトロリ線との間の接触力を適正な範囲内に収めることができるパンタグラフを提供する。
【解決手段】パンタグラフの舟体5は、一例として鈍頭型であり、前縁部の上下にそれぞれ設けられた可動式の凹凸手段(ラフネス)7A、7Bを備えている。トロリ線と摺り板6との間の接触力が所定の上限値を超えた場合には、下側のラフネス7Bを突出させて前記舟体の下面側の気圧を低下させる。一方、接触力が所定の下限値を下回った場合には、上側のラフネス7Aを突出させて前記舟体の上面側の気圧を低下させる。これにより揚力を調整することができ、舟体の接触力の調整が可能となる。
(もっと読む)
電動車走行システム
【課題】電動車に大規模な蓄電装置や発電装置を搭載することなく、集電子及び電車線の磨耗を有効に抑制しながら、当該電動車の良好な走行を可能にする。
【解決手段】電動車4の集電子6が電車線1に対して接離可能であり、この集電子6からの集電電力とは別に走行のための給電を行う車上給電ユニット10と、走行制御装置5とが電動車4に搭載される。走行制御装置5は、運行管理装置2とデータ通信を行い、電動車4の走行状態を、集電子6からの集電なしに車上給電ユニット10からの供給電力を利用して走行する第1の走行状態と、集電子6からの集電電力を利用して走行する第2の走行状態とに切換える。運行管理装置2は、電車線4での異常発生時にその走行状態を第1の走行状態にさせる旨の走行指令を走行制御装置5に送信する。
(もっと読む)
1 - 20 / 26
[ Back to top ]