
Fターム[5H115PG04]の内容
車両の電気的な推進・制動 (204,712) | 車両の種類 (12,614) | 電気自動車(ハイブリッド車を含む) (11,291)
Fターム[5H115PG04]の下位に属するFターム
Fターム[5H115PG04]に分類される特許
101 - 120 / 11,046
車両および車両用制御方法
【課題】複数の蓄電装置の各々を保護しつつ、複数の蓄電装置の各々の充放電性能を十分に発揮する。
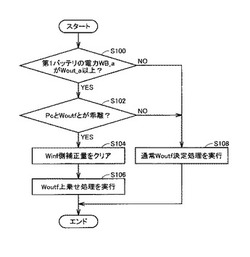
【解決手段】ECUは、第1バッテリの使用電力WB_aが放電側制限値Wout_a以上であって(S100にてYES)、かつ、指令パワーPcと第1バッテリおよび第2バッテリにおいて許容される入出力電力の上限値Woutfとが乖離している場合(S102にてYES)、Winf側補正量をクリアするステップ(S104)と、Woutf上乗せ処理を実行するステップ(S106)と、第1バッテリの電力WB_aがWout_aよりも小さい場合(S100にてNO)、あるいは、指令パワーPcと上限値Woutfとが乖離していない場合(S102にてNO)、通常Woutf決定処理を実行するステップ(S108)とを含む、プログラムを実行する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】アクセルペダルが踏み込まれた状態でハイブリッド車両が減速走行するときに部品保護やエネルギ効率の改善を図る。
【解決手段】モータ出力パワーPmg1が閾値Pref以上であってモータMG1が比較的高い回転数で回転しながら正のトルクを出力しており(ステップS130)、モータMG2の回転数変化量ΔNm2が閾値ΔNref未満であり(ステップS150)、かつモータMG2の回転数Nm2が閾値Nref未満である場合(ステップS160)、運転者によりアクセルペダルとブレーキペダルとの双方が同時に踏み込まれたのに伴ってモータMG1およびモータMG2の双方が電力を消費して正のトルクを出力するとみなされ、モータMG2に対するトルク指令Tm2*が減少側に補正される(ステップS170)。
(もっと読む)
車両の制御装置
【課題】勾配路における発進時の応答性を向上可能な車両の制御装置を提供する。
【解決手段】車両停止状態からの発進時、所定増加割合により動力源の駆動トルクを増加させるにあたり、検知された路面勾配が所定以上、かつ、車速が略0の状態が所定時間以上継続し目標駆動トルクが勾配負荷トルク相当値以上のときは、目標駆動トルクの増加割合を平坦路における所定増加割合よりも大きな勾配路用増加割合に変更する。尚、この勾配路用増加割合は、運転者のアクセルペダル開度が大きい程、大きな増加割合となるように設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】EV走行領域を拡大する。
【解決手段】動力源としてエンジン1及びモータ2を備えるハイブリッド車両100の制御装置であって、エンジン1の廃熱を回生動力として回生する廃熱回生装置6と、モータ2のみを動力源として走行するEV走行時に、廃熱回生装置6によって回生した回生動力をエンジン1の出力軸13に伝達する回生動力伝達機構(11,12,663)と、を備える。これにより、EV走行時に廃熱回生装置6によって回生した回生動力によってエンジン1の出力軸を空回しさせておくことができる。そのため、モータ2によるクランキングを行うことなくエンジン1を自立始動させることが可能となり、EV走行中にエンジン再始動のための余力を残しておく必要がない。したがって、モータ2のみによって走行できる領域を増大させることができる。
(もっと読む)
自動車
【課題】要求トルクの変化を制限する緩変化処理で用いるトルクの基準点を適正に設定する。
【解決手段】付加トルクTpaddが値0以上の場合、緩変化基準点Tbsとして、実行トルクTmpがシステム要件トルク(Tprqus+Tpadd)よりも大きいときには実行トルクTmpから付加トルクTpaddを減じたトルクを設定し、実行トルクTmpがシステム要件トルク以下でユーザー要求トルクTprqus以上のときにはユーザー要求トルクTprqusを設定し、実行トルクTmpがユーザー要求トルクTprqus未満のときには実行トルクTmpを設定する。これにより、緩変化基準点Tbsに付加トルクTpaddが反映されないようにすることができるから、運転者の意図しないトルクが出力されるのを防止することができ、ドライバビリティの向上を図ることができる。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両の走行中に内燃機関の始動に伴うショックの発生を抑制すると共に運転停止されていた内燃機関をより適正に始動させる。
【解決手段】エンジンの運転停止中におけるエンジンの始動判定に際して要求走行パワーと比較される始動判定パワーPref1は、当該始動判定パワーPref1をリングギヤ軸のトルクに換算することにより得られる換算始動判定トルクTc1が車速Vが高いほど小さくなるように設定され、エンジンの始動判定に際して要求トルクと比較される始動判定トルクTref1は、車速Vが間欠禁止車速Vrefよりも低い基準車速V0以下であるときに換算始動判定トルクTc1以下となると共に車速Vが基準車速V0を上回っているときに換算始動判定トルクTc1よりも大きくなるように設定される。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電気システム内部での過電圧等の電圧異常の発生を防止することによって走行距離を確保することである。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、MG1およびMG2のトルク上下限範囲に基づいて、MG1およびMG2の出力トルクによって発生できる電力線54の電力変化量の上下限範囲を設定するとともに、電力線54の電圧VHを電圧指令値に近付けるために必要な前記電力変化量の指令値を算出する。HVECU70は、さらに、指令値と上下限範囲との比較に基づいて、MG1およびMG2の出力トルクによる電力制御の可否を判定する。
(もっと読む)
ハイブリッド車両およびその制御方法
【課題】ハイブリッド車両のバッテリレス走行において、電動機および発電機の駆動に用いられる直流電圧を一定に制御するとともに、車両走行のための要求トルクを確保する。
【解決手段】ハイブリッド車20は、バッテリ50の異常時には、SMR55をオフしてバッテリレス走行を実行する。HVECU70は、バッテリレス走行時には、電力ライン54の電圧VHを電圧指令値に制御するためのMG1およびMG2の出力トルクである電力制御トルクを算出する。さらに、HVECU70は、電力制御トルクを出力する余地を残すように設定されたMG1およびMG2のトルク上下限範囲から、駆動軸32aに発生できる駆動トルクのトルク上下限範囲を定める。そして、HVECU70は、当該トルク上下限範囲内で車両走行のための要求トルクに最も近いトルクが駆動軸32aに発生するように、MG1およびMG2のトルク指令値を設定する。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車にて、実際のクラッチトルク特性の変化によってクラッチ操作部材の操作に対する「駆動輪に伝達される駆動トルク」の推移に変化が発生することの抑制。
【解決手段】この動力伝達制御装置は、動力源として内燃機関(EG)とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。クラッチトルク基準特性(マップ)にクラッチ戻しストローク検出値を適用してクラッチトルク基準値が決定される。このクラッチトルク基準値と「EGの出力軸の駆動トルク検出値」とのうちで小さい方の値が「CT通過後基準EGトルク」として決定される。MGトルクは、CT通過後基準EGトルクから、M/Tの入力軸の駆動トルク検出値(CT通過後実EGトルク)を減じた値に調整される。これにより、CT通過後EGトルクの誤差が補償され得る。
(もっと読む)
車両の制御装置
【課題】第2モータジェネレータの出力トルクTMが零付近である状態においてギヤの歯同士が衝突することによる音の発生を未然に防ぐ。
【解決手段】エンジンと、第2モータジェネレータと、エンジンと第2モータジェネレータとを連結するギヤと、エンジンによって駆動されて発電する第1モータジェネレータと、第1モータジェネレータが発電した電力を蓄える蓄電装置とが搭載された車両の制御装置は、蓄電装置の残存容量が予め定められたしきい値より大きいと、エンジンの出力軸回転数が増大するように制御するECUを備える。
(もっと読む)
車両用駆動装置の制御装置
【課題】ハイブリッド車両用駆動装置の制御装置であって、例えば短距離運転が頻繁に行われたとしても、車両の燃費悪化を抑制することができる制御装置を提供する。
【解決手段】電子制御装置110は、車両走行中において、車両状態が予め定められた長時間駐車状態になることを予測し、その車両状態が長時間駐車状態になる前に所定の制御開始条件が成立した場合には蓄電装置46の充電残量SOCを減らすようにする充電残量減少制御を実行する。そして、前記長時間駐車状態後の走行開始に際してエンジン10の暖機運転を行うと共にエンジン10からの動力で蓄電装置46に充電する。従って、前記長時間駐車状態後におけるエンジン10の暖機運転の際には蓄電装置46に充電余地が生じているので、エンジン10の暖機運転と共に発電することで、エンジン効率ηegを高めるようにエンジン負荷を調節し、車両6の燃費悪化を抑制することができる。
(もっと読む)
接近報知装置
【課題】歩行者の安全を確保することができる接近報知装置を提供する。
【解決手段】地域判定手段24Aは、自車位置が、接近を報知すべき接近報知地域に該当するか否かを判定する。時間帯判定手段24Bは、時刻情報生成部16によって検出された現在時刻が、接近報知地域に関連付けられた接近報知時間帯に該当するか否かを判定する。制御手段24Cは、地域判定手段24Aおよび時間帯判定手段24Bの双方の判定結果が肯定であるという条件が成立したときに接近報知手段を作動させる。
(もっと読む)
非接触給電による充電交通システム
【課題】運行予定に縛られない個人用の移動手段として完成されている軽自動車と、巡行運転が可能で給電も実施出来る電車のよいところをハイブリッド的に統合でき、極めて少ない費用と投資で構築できる、電気自動車の走行充電交通システムを提供する。
【解決手段】軽自動車規格の電気自動車又はハイブリッド車に電気容量の少ない小型蓄電池を搭載し、蓄電池の消耗分の電力を、ETCを改良した電力課金車両情報システムを利用して、勾配の緩やかな鉄道規格の専用道路に敷設した給電線より無接点の集電装置経由で送電する。
(もっと読む)
車両の発進制御装置
【課題】 車両発進時のクラッチジャダーを抑制できる車両の発進制御装置を提供する。
【解決手段】 車両の発進時、モータジェネレータMGと左右後輪RL,RRとの間に介装した第2クラッチCL2をスリップ締結状態からロックアップ締結状態へと移行させる車両の発進制御装置において、クラッチジャダーの発生が予測または検出された場合には、予測または検出されない場合よりもスリップ締結状態からロックアップ締結状態への移行時間を短くする。
(もっと読む)
ハイブリッド車両のエンジン停止制御装置
【課題】非走行レンジ選択中に第1クラッチ締結状態でイグニッションスイッチをOFFした時のモータの負トルクが車両の音振性能を悪化させないエンジン停止を実現する。
【解決手段】非走行レンジ選択中に(S15)、第1クラッチ締結状態のまま(S13)、イグニッションスイッチOFFにより(S11)、暖機後アイドル回転数Neidを超えた高回転(S17)でエンジンを停止させる場合、S19でエンジン回転数Neをアイドル回転数Neidへと低下させた後にエンジンを停止させるが、この際、モータの目標回転数tNmを所定の変化割合ΔNmで低下させ、モータ回転数Nmがこの目標tNmに追従するよう目標モータトルクtTmを定めてモータの制御をする。これにより、エンジン回転低下時における目標モータトルクtTmの変化量が、目標モータトルクtTmを音振許容トルク範囲内の値よりも大きくすることのない程度に抑制される。
(もっと読む)
車両の制御装置
【課題】 目標トルクをゼロ相当にしたときに安定した走行状態を達成可能な車両の制御装置を提供すること。
【解決手段】 エンジンとモータジェネレータとからなる動力源のトルク制御により目標トルクを発生させるときに、目標トルクをゼロ相当とする要求が出力されたときは、モータジェネレータをトルク制御から回転数制御に切り換え、かつ、該回転数制御における目標回転数を駆動輪回転数相当値とすることとした。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 コースト走行時に安定した減速を達成可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータジェネレータとからなる動力源と、動力源と駆動輪との間に介装され、複数の変速段を達成すると共に、1速をワンウェイクラッチの係合により達成する自動変速機と、自動変速機を変速する変速手段と、コースト走行中の減速の時は、動力源により負トルクである目標コーストトルクを発生させ、変速手段により1速へのダウンシフトが終了する前に、目標コーストトルクを0または正トルクとするコーストトルク制御手段と、を備えた。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機の変速種により判別される走行シーンに対応し、走行シーン毎に異なる要求性能を達成すること。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、自動変速機3と、モータトルク変化処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、アクセル操作と自動変速機3の変速種により判別される走行シーンが、駆動力レスポンスが要求される走行シーンであるほど大きな値のトルク変化率を選択し、ショック低減が要求される走行シーンであるほど小さな値のトルク変化率を選択し、モータトルク差分を、選択したトルク変化率で変化する目標モータトルクにより繋ぐ。
(もっと読む)
101 - 120 / 11,046
[ Back to top ]