
Fターム[5H115QE08]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 加速時 (488)
Fターム[5H115QE08]に分類される特許
1 - 20 / 488
ハイブリッド自動車
【課題】減速中に加速要求がなされたときに車両を迅速に加速させる。
【解決手段】減速からの加速と判定したときには、エンジンを始動して必要な回転数にするまでに要する時間に相当する時間などに設定された所定時間が経過するまでは、アクセル変化量ΔAccに係数αを乗じて得られる出力補正量ΔWを基本出力制限Wobaseに加えた値として出力制限Woutを設定する(S110〜S140)。これにより、基本出力制限Wobaseを出力制限Woutとした場合に比して、大きな出力制限Woutを用いてモータのトルク指令を設定して加速することができると共にエンジンを始動して必要な回転数まで上昇させてエンジンからのパワーを加えて加速することができる。この結果、減速中に加速要求がなされたときに車両を迅速に加速させることができる。
(もっと読む)
ハイブリッド自動車

【課題】発電機用インバータのスイッチングに伴うノイズの変化により運転者に違和感を与えるのを抑制する。
【解決手段】第1モータは車速Vに同期せずに回転する構成であり、車速変化量ΔVと回転数変化量ΔNm1との積が値0より大きいときには(S150)、第1モータの回転数Nm1に同期して変更されるキャリア周波数を用いたPWM制御方式でインバータをスイッチングする同期キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S170)。また、車速変化量ΔVと回転数変化量ΔNm1との積が値0以下のときには、予め固定されたキャリア周波数を用いたPWM制御方式でインバータをスイッチングする固定キャリアPWM制御方式によって第1モータが駆動されるようインバータを制御する(S160)。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 連続変速時であってもショックを回避可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータとの間の駆動力の伝達を断接する第1クラッチと、モータから駆動輪へ伝達される駆動力の伝達を断接する第2クラッチと、自動変速機の変速中に、第2クラッチをスリップ状態とするスリップ制御手段と、を備えたハイブリッド車両の制御装置において、スリップ制御手段は、現在の変速と次の変速とを連続で行う連続変速中に、現在の変速が終了した後、かつ、次の変速が終了する前に第2クラッチのスリップ状態を完全締結状態に移行させる場合には、第2クラッチの締結圧を徐々に上昇させることとした。
(もっと読む)
電動車両の制御装置
【課題】電動モータを回転数制御からトルク制御に切り替える際、加速側で切り替えレスポンスの向上を達成しながら、コースト減速中の切り替えに伴う捩れショックの発生を防止する。
【解決手段】ハイブリッド車両の制御装置は、モータジェネレータ2と、モータ制御切り替え手段としての統合コントローラ20と、遅れ処理手段としてのモータコントローラ22と、を備える。モータコントローラ22は、モータジェネレータ2の制御を回転数制御からトルク制御に切り替える際、モータトルク差分に対し、アクセル踏み込みによる加速側では、加速要求に適合する加速用変化量制限値によりモータトルク変化の遅れ処理を行なう。一方、アクセル足離しによるコースト減速中のときには、加速用変化量制限値よりも小さい値に設定したコースト用変化量制限値によりモータトルク変化の遅れ処理を行なう。
(もっと読む)
建設機械
【課題】HSTモータおよび走行電動モータによって制駆動する建設機械においては、停止状態から急加速を行う場合に、エンジンをアシストするために、蓄電装置から発電電動機を介してエンジン軸に伝えられた出力が、HSTポンプへの動力として吸収されてしまい、エンジンの加速が遅れる可能性があった。また、蓄電装置からの出力は、発電機やHSTポンプ等を介した後に走行動力として得られるため、駆動効率が低下するという課題があった。
【解決手段】本発明の建設機械は、エンジンをアシストする発電電動機が電動機動作を行う場合に出力されるアシスト要求出力と、HSTモータおよび/または走行電動モータのモータ回転数とに基づいて、走行電動モータを駆動するために出力される電動走行トルク指令およびHSTモータを駆動するために出力されるHST走行トルク指令を算出する制御手段を有することを特徴とする。
(もっと読む)
電気車制御装置
【課題】粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる電気機関車の電気車制御装置を提供すること。
【解決手段】速度ゼロから切換速度に達するまでは速度センサ付ベクトル制御器CAによって加速制御を行い、これと併行して速度ゼロから速度センサレスベクトル制御器CBも動作させて主電動機1の電圧・電流から推定速度を演算する。この推定速度と速度センサ2から得た速度とから空転検知用速度演算器5により空転検知に用いる速度を演算し、この速度を各動輪速度とみなし、その最小値を基準速度に設定して各動輪速度の差速度によって空転検知器6により空転検知を行いながら加速制御を行う。この加速制御中の平均加速度と機関車の平均牽引力から牽引質量推定器9で牽引質量を推定し、閾値演算器8において空転検知の閾値を設定する。列車速度が切換速度以上になった後は、この閾値を用いて軸加速度による空転検知を行う。
(もっと読む)
車両用駆動力制御装置
【課題】最大駆動力が制限された状態で加減速操作を行った場合の違和感を解消できる駆動力制御装置を提供する。
【解決手段】加減速操作量に対応させて駆動力を設定している駆動力特性に基づいて車両の駆動力を制御する車両用駆動力制御装置において、出力可能な最大駆動力が、制限条件が成立したことにより前記制限条件が成立しない場合より小さい駆動力に制限されることを検出する駆動力制限検出手段(ステップS1)と、出力可能な最大駆動力が制限されていることが前記駆動力制限検出手段によって検出された場合に、その制限が検出された時点の加減速操作量とその時点の駆動力との関係を維持したまま、前記時点の駆動力と前記制限された最大駆動力との間の前記出力特性を、前記制限が検出される前の出力特性から他の特性に変更する出力特性変更手段(ステップS6,S7)とを備えている。
(もっと読む)
シリーズハイブリッド車両の制御装置
【課題】エンジンと発電機とバッテリと駆動モータとを備えたシリーズハイブリッド車両の制御装置において、高燃費を維持しつつ、アクセル開度に応じてエンジン回転数を上げて運転者にエンジン音上昇による加速感を与えることにある。
【解決手段】制御手段(10)は、アクセル開度検出手段(11)により検出されたアクセル開度に基づいて目標エンジン回転数を決定し、アクセル開度検出手段(11)により検出されたアクセル開度が最小である時に発電効率が最大となるエンジン回転数を目標エンジン回転数とするとともに、アクセル開度検出手段(11)により検出されたアクセル開度が最大である時には出力が最大となるエンジン回転数を目標エンジン回転数とする。
(もっと読む)
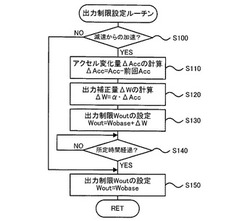
組電池の出力均等化システム
【課題】ハイブリット車等の電気自動車用の組電池の単位セル毎の過放電防止と、走行距離を伸ばすこと、との両立を図ることができる組電池の出力均等化システムを提供する。
【解決手段】監視制御部80は、車両の加速時に組電池10の出力が所定値を超えた場合(ステップ100)、全てのセル11のセル電圧を電圧監視回路60に検出させる(ステップ110)。そして、セル電圧の電圧バラツキが閾値(ΔV)を超える場合(ステップ120)、検出させたセル電圧を記憶部90に記憶させると共に、均等化を継続して行うための所定時間を設定する(ステップ130)。この後、記憶部90に記憶させた各セル11のセル電圧がそれぞれ等しくなるように均等化回路70に均等化を行わせる(ステップ140)。均等化は、設定した所定時間が経過するまで行う。
(もっと読む)
ハイブリッド自動車
【課題】加速要求に迅速に対応する。
【解決手段】高電圧系の電圧VHが要求トルクTr*が閾値Tref以上であるときより低い昇圧上限値Vlim(電圧Vlo)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御している最中に要求トルクTr*が閾値Tref以上になったときには(ステップS170)、高電圧系の電圧VHが昇圧上限値Vlim(電圧Vhi)の範囲内で要求トルクTr*に基づいて設定される電圧指令VH*になるよう昇圧回路55を制御する(ステップS200,S230)と共にエンジン22を応答性よく運転しながら要求トルクTr*に基づくトルクにより走行するようエンジン22やモータMG1,MG2を制御する(ステップS220,S240)ことにより、加速要求により迅速に対応することができる。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】アクセルレスポンスを犠牲にすること無く、加減速時における車輌前後振動や衝撃を効果的に抑制緩和し得るハイブリッド車輌の制御装置を提供する。
【解決手段】加減速時に発生するエンジントルクと、エンジンがエンジンマウントに対し直立姿勢となるエンジントルク(バランストルク)との差分に基づいて目標エンジントルクと目標電動機駆動トルクを算出し、この算出した目標電動機駆動トルクが得られるように電動機を駆動制御し、加減速時におけるエンジンから車軸等の駆動系への入力トルクの急変を抑える。
(もっと読む)
走行制御支援方法及び走行制御支援装置
【課題】安全性を低下させることなく、コストをかけずに、警報時間の短縮効果が得られる走行制御を支援する。
【解決手段】列車2が踏切3に接近すると、車上装置21は、自らの列車2の位置・速度情報を所定の間隔で踏切制御装置31に送信する。踏切制御装置31は、車上装置21から受信する列車の位置及び速度に基づいて踏切到達予測時間及びブレーキパターン到達予測時間を算出する。また、踏切制御装置31は、予め記憶する設計警報時間と、算出される踏切到達予測時間を比較するとともに、予め記憶する踏切遮断完了時間と、算出される踏切遮断完了時間を比較し、所定の条件を満たす場合には警報を開始するように指示する。踏切制御装置31が、警報開始後に列車2を加速させる走行制御パターンを算出し、車上装置21に送信する。そして、車上装置21は、算出される走行制御パターンを乗務員に提示し、乗務員による走行制御を支援する。
(もっと読む)
セミトレーラ式のハイブリッド車両
【課題】セミトレーラ式のハイブリッド車両に関し、燃費を効果的に改善する。
【解決手段】トラクタ10及びトレーラ20を有するセミトレーラ式のハイブリッド車両1に、トラクタ10に搭載されたエンジン11と、トラクタ10に搭載された第一の電動発電機13と、トレーラ20に搭載され、第一の電動発電機13に電力を供給可能に接続されるバッテリ25と、トレーラ20に搭載され、発電した電力をバッテリ25に供給する第二の電動発電機26と、トレーラ牽引走行時に、走行用の動力源としてエンジン11及び第一の電動発電機13の少なくとも一方の動力を用いるように制御し、かつ、トラクタ単体走行時に、走行用の動力源としてエンジン11の動力を用いるように制御する動力制御手段60,61とを備えた。
(もっと読む)
ハイブリッド自動車の制御装置
【課題】一方の変速機入力軸にのみモータを取り付けたデュアルクラッチ式変速機において、変速段の切替時等にクラッチの断接によってドライバに与える違和感を解消することができ、効率よくバッテリを駆動することができるハイブリッド電気自動車の制御装置を提供する。
【解決手段】変速ギア機構4は、エンジン1と第1クラッチ2Aを介して接続され且つモータ3が配置された第1入力軸40Aを備えて複数の変速段を有する第1変速機構4Aと、エンジン1と第2クラッチ2Bを介して接続された第2入力軸40Bを備えて複数の変速段を有する第2変速機構4Bと、を備え、ドライバの加速要求を検出するアクセルポジションセンサ58と、ドライバの加速要求が検出されると、第1変速機構4Aの発進変速段の使用時以外は、クラッチ2A,2Bの同時遮断を禁止するクラッチ制御手段60aを備える。
(もっと読む)
ハイブリッド電気自動車の制御装置
【課題】ハイブリッド電気自動車の制御装置において、様々な運転状況下で発生する駆動輪のスリップに対して各運転状況に応じた制御を行ない適切にスリップの抑制を行なう。
【解決手段】走行駆動源としてのエンジン1及びモータ3と、エンジン1とモータ3との間に介装されたクラッチ2と、駆動輪8の実スリップ率を算出するスリップ率算出手段60bと、駆動輪8のスリップが検出されたら、クラッチ2の断接状態と、車両の走行状態に基づいて、駆動輪8の目標スリップ率を設定する目標スリップ率設定手段60dと、駆動輪8のスリップが検出されたら、実スリップ率が目標スリップ率になるように走行駆動源の出力トルクを制御する出力トルク制御手段60eとを備える。
(もっと読む)
ハイブリッド電気自動車の停車発電制御装置
【課題】車両停車中にバッテリのSOC低下に応じて停車発電制御を適切に実行でき、もって確実にバッテリのSOCを回復できるハイブリッド電気自動車の停車発電制御装置を提供する。
【解決手段】PレンジまたはNレンジでの車両停車中においてバッテリのSOCが充電判定値SOC0以上のときには(S10がNo)、インナクラッチC1及びアウタクラッチC2を切断状態に保持して油圧ポンプ駆動のためのエンジン負荷を軽減する一方(S12)、SOCが充電判定値SOC0未満のときには(S10がYes)、電動機3側のアウタクラッチC2のみを接続状態に切り換え(S16)、停車発電制御により電動機3をジェネレータ作動させてバッテリ5を充電する(S18)。
(もっと読む)
組電池及びこれを装備する電動車両
【課題】電池セルを積層しない状態で、絶縁性のセパレータを電池セルの定位置に固定し、セパレータでもって外装缶の表面の一部あるいは全体を絶縁して、電池セルの組み立て工程や取り扱いを極めて容易に、しかも安全にする。
【解決手段】組電池は、複数の電池セル1を絶縁性のセパレータ2を介して積層して、セパレータ2と電池セル1とを定位置に連結している。セパレータ2は、隣接する電池セル1の間に挟着される絶縁プレート部21の周囲に外周壁22を有し、この外周壁22の内側に電池セル1を嵌め込んで定位置に配置する箱形凹部23を設けている。さらに、セパレータ2は、外周壁22のコーナー部に、箱形凹部23に挿入される電池セル1のコーナー部を押圧して、箱形凹部23に挿入される電池セル1を箱形凹部23に固定する押圧固定部9を設けており、この押圧固定部9で、箱形凹部23に挿入される電池セル1をセパレータ2に固定している。
(もっと読む)
ハイブリッド電気自動車の変速制御装置
【課題】第2歯車機構のプレシフト要求と走行モードの切換要求とが相前後して発生したとき、これに応じたエンジン吹き上がり制御による燃料消費の増大及び騒音発生を抑制できるハイブリッド電気自動車の変速制御装置を提供する。
【解決手段】電動機単独走行中において偶数歯車機構G2に対するプレシフト要求があったときに(S2,4)、エンジン・電動機併用走行への走行モードの切換要求があるまで待機し、この走行モードの接続要求があると(S6がYes)、インナクラッチC1を接続し、電動機3の駆動力を0にしていくと共にエンジン駆動力を増加させて(S8,10)、電動機3の駆動力の瞬断を防止しつつ偶数歯車機構G2に対するプレシフトを実行し(S12)、同時にエンジン・電動機併用走行への走行モードの切換を完了する(S14)。
(もっと読む)
四輪駆動車の動力伝達装置及び動力伝達方法
【課題】四輪駆動状態と二輪駆動状態との切り換え機能、及び、高速レンジと低速レンジとの切り換え機能を有する四輪駆動車に対し、構成の簡素化及び小型化を図ることができる四輪駆動車の動力伝達装置を提供する。
【解決手段】遊星歯車機構30のキャリアCAをモータジェネレータ2の出力軸26に、リングギヤRをリヤプロペラシャフト51に、サンギヤSをフロントプロペラシャフト41にそれぞれ接続する。サンギヤSを車体側に固定可能とするスリーブ機構と、フロントディファレンシャルギヤ44と右側車輪4Rとの間のトルク伝達を遮断可能とするディスコネクト機構46とを備えさせる。スリーブ機構を解放状態とし且つディスコネクト機構46を係合状態とすることで4WD−Loモードを成立させる。スリーブ機構を係合状態とし且つディスコネクト機構46を解放状態とすることで2WD−Hiモードを成立させる。
(もっと読む)
電動機のステータコアの取付方法
【課題】ステータコアをコアホルダの内周に無理なく装着でき、かつコアホルダあるいはステータコアの熱変形等によっても、コアホルダに対するステータコアの軸方向移動を規制することができる電動機のステータコアの取付方法を提供する。
【解決手段】コアホルダ44の内周に、電動機のステータコア41を取付ける取付方法は、コアホルダの円筒部44aに形成された凹部37内にステータコアの外周部を係合する工程を含む。凹部は第1壁37aと第2壁37bと底部37cとにより区画され、常温における第1壁と第2壁との間の距離は、ステータコアの外周部が凹部内に嵌合するように設定されている。
(もっと読む)
1 - 20 / 488
[ Back to top ]