
Fターム[5H115QE10]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 減速、制動時 (1,407)
Fターム[5H115QE10]に分類される特許
81 - 100 / 1,407
車両の駆動力制御装置
【課題】車両の駆動力制御装置において、運転者によるアクセル操作の負担を軽減してドライバビリティの向上を可能とすると共に燃費の悪化を抑制可能とする。
【解決手段】エンジン11とモータジェネレータ14との駆動力を駆動輪16に伝達可能なハイブリッド車両にて、エンジン11の駆動力により車両を走行可能なエンジン走行モードとモータジェネレータ14の駆動力により車両を走行可能なEV走行モードとを切替可能であり、また、アクセル開度に基づいてモータジェネレータ14が駆動力を出力する力行区間と回生制動させる回生区間と駆動力及び回生制動のない惰性走行区間とに切替可能であり、運転者による惰性走行区間への切替意図を検出してから惰性走行区間を通過して力行区間または回生区間へ移行した頻度に基づいて惰性走行区間の領域を変更する。
(もっと読む)
ハイブリッド車両の制御装置自動車の発電制御

【課題】強制発電モードでありかつ減速コースト運転中である場合において特定の条件ではエンジンをフュエルカットすることとして燃費を向上させる。
【解決手段】強制発電モードでありかつ減速コースト運転中であると判定された場合に、エンジンをフュエルカットしたときバッテリから放電されるフュエルカット時バッテリ放電条件であるのか、それともエンジンをフュエルカットしたときバッテリに充電されるフュエルカット時バッテリ充電条件であるのかを判定し(S3)と、この判定結果よりフュエルカット時バッテリ放電条件であると判定された場合に作動状態のエンジンでモータジェネレータを連れ回しての発電を行わせ(S7、S8)、フュエルカット時バッテリ充電条件であると判定された場合にエンジンをフュエルカットする(S5、S6)。
(もっと読む)
車両用走行制御装置
【課題】ハイブリッド車両において、実際のエンジントルクの変動に伴うエンジン停止・始動のハンチングを抑える。
【解決手段】目標とする走行状態が予め設定したエンジン停止判定値以下の場合には、エンジン1による駆動輪の駆動を停止する。このとき、目標エンジントルクと実際のエンジントルクとの間の推定される偏差に基づき、上記エンジン停止判定値を補正する。
(もっと読む)
回生制御装置
【課題】回生制御を行っている場合のアップシフト時に制動力抜けを抑制する回生制御装置を提供する。
【解決手段】モータジェネレータと、モータジェネレータと駆動輪との間に配置される変速機とを備えた車両における回生制動を制御する回生制御装置であって、統合コントローラは、回生制御を実施しているかどうか判定し、変速機でアップシフトを行っているかどうか判定し、回生制御を実施し、かつ変速機でアップシフトを行っている場合に、イナーシャフェーズの解放側クラッチトルク容量を、回生制御を実施せずにアップシフトを行っている場合のイナーシャフェーズの解放側クラッチトルク容量よりも大きい値に設定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エネルギー効率を高めつつ、共振による振動を抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】第1回転電機は、エンジンとの間で動力伝達が行われ、エンジンの動力に基づき発電する。第2回転電機は、車両の駆動軸と連結し、当該駆動軸の動力に基づき回生制動を行う。蓄電手段は、例えばバッテリであり、第1回転電機及び第2回転電機に電力を供給すると共に、第1回転電機及び第2回転電機の回生電力により充電を行う。制御手段は、第2回転電機の回生制動時に、当該回生電力のうち蓄電手段により充電できない電力に基づき、第1回転電機によりエンジン回転数を上昇させるエンジン強制回転制御を行う。このとき、制御手段は、上述の充電できない電力が、エンジン強制回転制御を実行したときにエンジン回転数が共振回転数より大きくなる電力である場合に、エンジン強制回転制御を行う。
(もっと読む)
モータ設計方法、モータ設計方法により設計されたモータおよびモータを備えた電気式車両。
【課題】走行パターンを分析し、仕事量をモータ効率で除算した時間積分が最小となるようなモータの効率マップを設定することにより電力消費量を改善できるモータ設計方法、モータ設計方法により設計されたモータおよびモータを備えた電気式車両を提供する。
【解決手段】モータ設計方法、モータ設計方法により設計されたモータ11およびモータ11を備えた電気式車両10は、予め定められた走行パターンを達成するのに必要な回転数および予め定められた走行パターンを達成するのに必要なトルクの集合を求める第1算出工程と、回転数およびトルクに対応するモータ効率をある一つのモータ特性曲線から選択する第2算出工程と、回転数およびトルクから仕事量を求め、仕事量をモータ効率で除算して消費電力を求める第3算出工程と、第1算出工程と第2算出工程と第3算出工程とを全走行時間にわたって繰り返して消費電力の総和を求める第4算出工程とからなる。
(もっと読む)
回生制動制御装置
【課題】本発明は、ブレーキフィーリングを向上することのできる回生制動制御装置を提供する。
【解決手段】ペダル回生最大トルク演算ブロック(B18a)では、入力された車速におけるブレーキペダル操作で発生しうる最大の回生トルクであるペダル回生最大トルクが演算される。また、ゲイン演算ブロック(B18b)では、ブレーキペダルストローク量が所定操作量以下の少ない領域においてはブレーキペダルストローク量の変化量に対するゲインの変化量を少なくし、ブレーキペダルストローク量が所定操作量より多い領域においてはブレーキストローク量の変化量に対するゲインの変化量を多くしている。そして、ペダル回生最大トルクとゲインとを乗算し、ペダル回生トルクが演算され、切換ブロックに供給される。
(もっと読む)
ハイブリッド自動車
【課題】アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にする。
【解決手段】シフトポジションSPがBポジションでアクセルオフのときに、モータMG2の回生駆動によって生じる回生電力Pm2の積算値である回生電力積算値Pm2を計算すると共に(S210,S220)、エンジンのモータリングのためにモータMG1で消費されるモータリング電力Pm1の積算値であるモータリング電力積算値Pm1sumを計算し(S230,S240)、モータリング電力積算値Pm1sumと回生電力積算値Pm2sumとの和が正の値(電力消費側の値)のときには(S270)、シフト変更提案情報をディスプレイに表示出力する(S280)。これにより、シフトポジションSPのDポジションへのシフト変更を運転者に促すことができ、アクセルオフ時にバッテリから放電が行なわれるのを抑制可能にすることができる。
(もっと読む)
ルート探索装置、ルート探索方法、車両側装置
【課題】従来のガソリン車から集約した燃費情報に基づいて作成されたデータベースをそのまま利用すると、新たなタイプの車両に対しては適切な経路案内を実現することができない恐れがあった。
【解決手段】本発明のルート探索装置は、駆動源にモータを使用するタイプの車両から回生電力量に関する情報を取得する取得部と、取得部で取得した回生電力量に関する情報を地図情報に対応付けて記憶する記憶手段と、記憶手段に記憶された回生電力量に基いてルートを探索するルート探索手段と、を備えたことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置
【課題】 車両負荷が大きいときに第2クラッチの過剰な発熱を抑制可能なハイブリッド車両の制御装置を提供すること。
【解決手段】 エンジンとモータの間に第1クラッチを有し、モータと駆動輪の間に第2クラッチを有するハイブリッド車両において、車両負荷が所定値以上のときは、エンジンを作動させた状態で第1クラッチを解放し、モータをエンジン回転数よりも低い回転数として第2クラッチをスリップ締結することとした。
(もっと読む)
物品搬送設備
【課題】搬送装置の搬送作動時にサーボ制御される電動モータを停止状態にて制動するときの電力の低減を図ることができながら、必要な搬送能力を維持することができる物品搬送設備を提供すること。
【解決手段】電動モータを制動する制動状態と制動を解除する解除状態に切換自在で、電力供給時に解除状態に、非供給時に制動状態に切り換える制動手段と、高負荷状態か低負荷状態かを判別する負荷状態判別手段とが設けられ、制御手段が、高負荷状態において、電動モータを停止状態に維持するときは、制動手段を解除状態にしかつ駆動制御手段によるサーボロックにて電動モータの回転作動を制動し、低負荷状態において、電動モータを停止状態に維持するときは、駆動制御手段による電動モータのサーボ制御を中断しかつ制動手段を制動状態に切り換えることで電動モータの回転作動を制動する物品搬送設備。
(もっと読む)
車両の制動制御装置
【課題】車両の制動制御装置に関し、エネルギーの有効利用とブレーキ性能の向上とを両立させる。
【解決手段】回生発電により車輪11に回生制動力を付与するモータ装置1と、車輪11に摩擦制動力を付与するブレーキ装置2とが設けられた車両の制動制御装置において、モータ装置1で発電された電力の充電先であるバッテリ9の充電量を検出する検出手段7aと、バッテリ9の電力で駆動されブレーキ装置2の摩擦面に空気を送風する送風手段3とを備える。
また、バッテリ9の電力で駆動され送風手段3が送風する前記空気を冷却する冷却手段4,5と、検出手段7aで検出された前記充電量に応じて、送風手段3及び冷却手段4,5を駆動する制御手段7cとを備える。
(もっと読む)
スタッカクレーン
【課題】走行作動と昇降作動とのそれぞれで適切な省電力化を図ることができるスタッカクレーンを提供すること。
【解決手段】制御手段が、走行台車が定格走行速度で走行し、かつ、昇降台が定格昇降速度で昇降するように搬送制御を実行する定格運転モードと、走行台車が、走行作動に関して省電力に適した省電力運転用走行速度で走行し、かつ、昇降台が、昇降作動に関して省電力に適した省電力運転用昇降速度で昇降するように、搬送制御を実行する省電力運転モードとに切り換え自在に構成されているスタッカクレーン。
(もっと読む)
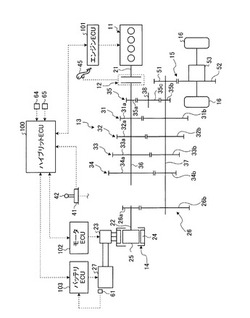
車両の制御システム
【課題】複数のEV走行モードを有する車両でEV走行モードの使用制限の発生を抑えること。
【解決手段】電気エネルギを変換した機械エネルギを動力にして駆動力を発生させるモータ/ジェネレータ20の動力を用いた複数のEV走行モードの中から所望のEV走行モードを運転者に手動で選択させる走行モード選択装置(クラッチ50、クラッチペダル51及び変速操作装置71)と、夫々の前記EV走行モード毎に当該EV走行モードの出力制限を設定するハイブリッドECU100及びモータ/ジェネレータECU102と、を備えること。
(もっと読む)
蓄電装置及びそれに用いられる監視制御装置
【課題】エネルギー損失を小さくできる蓄電装置及びそれに用いられる監視制御装置の提供を課題とする。
【解決手段】上記課題は、複数の単電池セル104がSDスイッチ103によって第1単電池セル群101と第2単電池セル群102とに電気的に解列(分離)されたとき、第1単電池セル群101と第2単電池セル群102との間に構成した接続回路502によって、第1単電池セル群101と第2単電池セル群102との間の同電位の位置関係にある単電池セル104を電気的に並列に接続し、この電気的に並列に接続された単電池セル104の一方から他方に放電させることにより、解決することができる。
(もっと読む)
車両用ブレーキ装置
【課題】回生ブレーキ装置における回生可能制動力を知りつつ制動制御を行うことで、良好な制動フィーリングおよび高い回生効率が得られる車両用ブレーキ装置を提供する。
【解決手段】液圧制動力を車輪に付与する液圧ブレーキ装置と、発電電動機に駆動される駆動輪に回生制動力を付与する回生ブレーキ装置と、液圧制動力および回生制動力を協調制御する制動制御装置とを備える車両用ブレーキ装置であって、制動制御装置は、発電電動機に指令した回生要求制動力FRから発電電動機が実行した回生実行制動力FGを減算して差分量DFを演算する手段(S9)と、回生要求制動力FRが発電電動機の実行可能な回生可能制動力FX(FXU、FXL)の範囲内であるか否かを判定する手段(S11)と、差分量DFが正でかつ回生要求制動力FRが回生可能制動力FXの範囲内である場合に液圧制動力FCの増加を抑制する手段(S12)と、を有する。
(もっと読む)
車両のブレーキ制御装置および編成列車のブレーキ制御装置
【課題】従来は回生ブレーキと空気ブレーキの協調制御において空気ブレーキの応答遅れを実回生ブレーキ力に所定の補正量を付加することで補っていたため、車両状態および気温等の外部状態に応じて毎回異なる空気ブレーキの応答遅れに対応できず、回生ブレーキと空気ブレーキの総和が必要なブレーキ力と一致しなかった。
【解決手段】車両のブレーキ制御装置に出力可能な回生ブレーキ力を推定する手段を設け、推定された回生ブレーキ力と必要ブレーキ力から空気ブレーキ力の指令値を決定し、回生ブレーキ力の指令値は必要ブレーキ力と実際に作用した空気ブレーキ力からを決定することで、ブレーキ力の総和を必要ブレーキ力に一致させることができ、さらに現車での補正量調整が不要となる。
(もっと読む)
ハイブリッド車両の駆動制御装置
【課題】例えばEV走行からパラレルHV走行に切り替える際のエンジンの始動時にハイブリッド車両の走行能力が低下することを抑制する。
【解決手段】ハイブリッド車両の駆動制御装置は、ハイブリッド車両(1)の走行モードを、第2回転電機(MG2)のみから駆動軸(OUT)に駆動力を出力する第1走行モード(EV走行)から内燃機関(20)及び第2回転電機から駆動軸に駆動力を出力する第2走行モード(パラレルHV走行)に切り替える際、内燃機関を始動させるために第1回転電機(MG1)の動力によって内燃機関の回転数を増大させるときに、クラッチ(CR)を滑らせる制御手段を備える。
(もっと読む)
車両用電源装置
【課題】車両減速時の回生エネルギーの損失を抑制して、高圧蓄電手段および低圧蓄電手段のどちらにも効率良くエネルギーを回収すること。
【解決手段】第1の回路部L1は、高圧蓄電手段111と低圧蓄電手段112との間をDC/DCコンバータ107を介して接続する。第2の回路部L2は、発電機102と高圧蓄電手段111との間を接続し、第3の回路部L3は、発電機102と低圧蓄電手段112との間を接続する。高圧用全波整流器103は、高圧蓄電手段111の充電を遮断可能に構成されている。低圧用全波整流器104は、低圧蓄電手段112の充電を遮断可能に構成されている。電源ECU113は、車両が減速するときに発電機102により発電される電力の充電経路を、高圧用全波整流器103および低圧用全波整流器104を制御することにより第2および第3の回路部L2、L3のいずれかに設定する。
(もっと読む)
制御装置
【課題】回生制動時のトルク変動を抑制する。
【解決手段】エンジンの吸気弁及び排気弁のバルブ作動角の中心位相角を変更可能な可変動弁機構を制御する制御装置は、電動モータによる回生制動時に、吸気弁の中心位相角を、上死点を含む角度範囲内で予め決められた第1角度(例えば、上死点TDC)に変更すると共に、排気弁の中心位相角を、下死点を含む角度範囲内で予め決められた第2角度(例えば、下死点BDC)に変更する。また、制御装置は、排気弁の中心位相角を、上死点を含む角度範囲内で予め決められた所定角度(例えば、上死点)に変更してもよい。そして、排気行程の後半に吸気弁を開弁させて筒内へと導入される空気量を抑制し、筒内圧力の最大値及び最小値を小さくすることで、トルク変動を抑制する。
(もっと読む)
81 - 100 / 1,407
[ Back to top ]