
Fターム[5H115QE10]の内容
車両の電気的な推進・制動 (204,712) | 制御時の状態 (7,652) | 減速、制動時 (1,407)
Fターム[5H115QE10]に分類される特許
21 - 40 / 1,407
運転支援装置
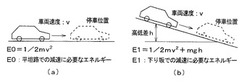
【課題】下り勾配区間におけるモータの回生損失の低減を図る。
【解決手段】搭載車両の走行先に、当該搭載車両を停車位置に一時停止させるためのブレーキ操作を必要とする下り勾配区間が存在すると判定した場合、搭載車両の位置から停車位置までの区間において、平坦区間を走行する際に行われるブレーキ操作でモータの回生損失が発生するか否かを判定し、モータの回生損失が発生すると判定された場合、平坦区間を走行する際に行われるブレーキ操作の操作開始位置より手前でブレーキ操作を開始するように運転者に案内する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
移動体制御システム
【課題】速度発電機やGPS、加速度センサ、ドップラーレーダーなどの位置推定手法は、列車状態や周辺環境などによって推定精度が常に変化するため、走行前に適切な誤差を想定して安全余裕距離として設定することが難しく、過剰な安全余裕距離が設定され、運行密度が低下する可能性がある。
【解決手段】車上装置1は、位置推定装置11と位置精度評価装置12と送信装置14と受信装置15と停止目標情報を元に列車の走行速度を制御する速度制御装置13とを有し、地上装置2は、各列車からの列車位置情報及び位置精度情報を受信する受信装置21と受信情報を元に各列車の在線確率を算出する在線確率算出装置22と在線確率情報を元に停止目標を算出する停止目標算出装置23と停止目標を送信する送信装置24とを有し、位置推定精度が走行中に変化した場合、その変化に追従して最適な停止目標を算出する。
(もっと読む)
電動車両の制御装置
【課題】ユーザによってブレーキ操作がなされる状況下、車両の運動エネルギをモータジェネレータ10の発電エネルギに変換して高圧バッテリ48(第1バッテリ)を充電する主機回生制御処理が行われる電動車両がある。この車両において、主機回生制御処理を適切に行うことができず、車両の運動エネルギを有効に利用することができないおそれがあること。
【解決手段】主機回生制御処理が行われる状況下において、車両の運動エネルギをコンプレッサ30の駆動エネルギ及びオルタネータ18の発電エネルギに変換し、蓄熱器34に蓄熱したり、低圧バッテリ40(第2バッテリ)を充電したりする処理である補機回生制御処理を行う。
(もっと読む)
車両の制御装置
【課題】蓄電装置を搭載し外部充電が可能な車両において、蓄電装置を構成するセルの電圧を検出する検出部の診断を確実に実行する。
【解決手段】外部充電が可能な車両100のECU300は、蓄電装置110のSOCを演算するためのSOC演算部310と、蓄電装置110内の複数のセルCL1〜CLnの各々についての電圧を検出する検出部DT1〜DTnの自己診断を実行する判定部330と、充電装置200を制御するための充電制御部350とを備える。判定部330は、SOCが基準範囲内であるときに自己診断を実行することができるように設定され、外部充電の実行中にSOCが基準範囲内となった場合に、充電動作を一時的に中断して自己診断を実行する。
(もっと読む)
運転支援装置
【課題】より適切に減速操作の案内を行うようにする。
【解決手段】搭載車両の走行先に存在する信号機より手前に設置された光ビーコン51から送信される情報を受信して搭載車両が走行先に存在する信号機の手前で停車する際の搭載車両の停車位置を推定し(S116)、予め定められた基準値以下の減速度で、推定した停車位置に搭載車両を停止させるための減速操作を開始すべき減速操作開始位置を特定し(S120、S122)、搭載車両が減速操作開始位置に到達する前に、運転者に減速操作の開始を促す案内を行う(S132)。
(もっと読む)
ハイブリッド車両の充電量制御装置
【課題】ハイブリッド車両の走行開始前に空調装置を作動させる場合でも、そのときにエンジンを始動して空調装置の作動用の電気エネルギーを生成する必要性を低下させる。
【解決手段】充電量制御装置は、学習処理において、走行前空調運転を行う場所として登録場所を記録し、当該登録場所で走行前空調運転を行う前に当該登録場所で車両を駐車する時刻を登録時刻Bとして記録する。また、車両が当該登録場所を含むエリアの外から中に入ったことに基づいて、当該登録時刻Bを含む制御対象時間帯を算出し、車両が当該エリアの外から中に入った進入時刻が、当該制御対象時間帯内に入っているか否かを判定し(320、330、340)、入っていると判定した場合、バッテリの充電量が第1範囲内に収まるよう制御されている状態から、バッテリの充電量が第1範囲内よりも上限および下限が大きい第2範囲内に収まるよう制御する(350)。
(もっと読む)
車両用制動装置
【課題】ビルドアップ制御を行う車両制動装置において、ビルドアップによる制動力を適切に設定する。
【解決手段】モータ駆動シリンダ8と、ペダルストロークセンサ11aと、ディスクブレーキ3と、制御ユニット6とを有するブレーキ装置であって、ブレーキ液圧を検出する液圧センサ16を有し、制御ユニットが、ブレーキペダル操作量の変化量に応じて、通常マップと、ビルドアップマップとのいずれかを選択し、ブレーキペダル操作量に基づいて選択したマップを参照し、ブレーキ液圧規範値を設定するブレーキ液圧規範値設定部23と、ブレーキ液圧規範値とブレーキ液圧との差に基づいてブレーキ液圧規範値を補正する補正値設定部25および加算器26と、補正されたブレーキ液圧規範値に応じて目標値を設定するストローク目標値設定部28とを有する。
(もっと読む)
電気自動車および電気自動車走行制御方法
【課題】電気自動車における電気エネルギー利用効率の改善および車両減速時の運動エネルギー回生動作による大容量二次電池サイクル寿命の劣化低減。
【解決手段】信号交差点赤信号時の減速・停止、およびその後の発進・加速による車両の運動エネルギー変動量及び運動エネルギー変動量の時間変化量を、交差点無停止走行によって最小にする。また、無信号交差点等の停止点に向けての減速時においては、運動エネルギー回生走行に代えて、その時点での車両の有している運動エネルギーを最大限直接的に車両走行に活用した惰性走行あるいは惰性走行減速度に近い減速度での等減速度走行を行う。
(もっと読む)
自動列車停止装置および自動列車停止方法
【課題】変周式およびトランスポンダ式の両方式に対応したATS車上装置の更なる小型化を図ることが可能な自動列車停止装置および自動列車停止方法を得る。
【解決手段】列車で検出された速度情報20を速度照査パターンに照査して列車速度を制御するATS車上装置1を備えた自動列車停止装置であって、ATS車上装置1には、トランスポンダ式地上子からの電文を受信する車上子13と、変周式地上子の周波数に応じて変周された変周信号を検出する車上子14とが設置されており、ATS車上装置1は、車上子14から勾配補正を示す変周信号が出力された場合、この変周信号を出力した2つの変周式地上子間の距離を計測し、計測された距離に対応した勾配値で速度照査パターンを補正する。
(もっと読む)
ハイブリッド車輌の制御装置
【課題】アクセルレスポンスを犠牲にすること無く、加減速時における車輌前後振動や衝撃を効果的に抑制緩和し得るハイブリッド車輌の制御装置を提供する。
【解決手段】加減速時に発生するエンジントルクと、エンジンがエンジンマウントに対し直立姿勢となるエンジントルク(バランストルク)との差分に基づいて目標エンジントルクと目標電動機駆動トルクを算出し、この算出した目標電動機駆動トルクが得られるように電動機を駆動制御し、加減速時におけるエンジンから車軸等の駆動系への入力トルクの急変を抑える。
(もっと読む)
電動車両のブレーキ制御装置
【課題】回生協調ブレーキ制御中にABS制御が介入したとき、制御干渉の防止と、制御再介入の頻度抑制と、回生エネルギー量確保の実効と、を併せて達成すること。
【解決手段】ハイブリッド車のブレーキ制御装置は、液圧制動手段であるブレーキ液圧発生装置1と、回生量制御手段であるモータコントローラ8と、回生協調ブレーキ制御手段である統合コントローラ9と、ABS制御手段であるブレーキコントローラ7と、を備える。統合コントローラ9は、回生協調ブレーキ制御中にABS制御が介入したとき、ABS制御介入中は回生制動要求を停止し、ABS制御が非作動状態へ移行すると、前回のABS制御介入時の回生量を超えない値に制限した回生量を今回の回生量リミッタとする制限付き回生制動要求による回生協調ブレーキ制御に復帰するABS介入時回生協調ブレーキ制御を行う(図3)。
(もっと読む)
電気自動車の制御装置
【課題】バッテリの長寿命化と充電効率の改善を好適に実現可能な電気自動車の制御装置を提供する。
【解決手段】本発明の電気自動車(1)は、バッテリ(11)の充電電力で力行駆動する電動機(4)を搭載し、下り勾配を走行する際に電動機を回生駆動させてバッテリに充電を行う。その制御装置は、走行路面の勾配情報を取得する手段(17)と、バッテリ(11)の充電量を検出する手段(15)と、勾配継続距離を走行した際にバッテリの充電量が上限充電量となるように、下り勾配を走行中の電動機(4)の回生量を設定する制御手段(26)とを備えたことを特徴とする。
(もっと読む)
車両用ブレーキ装置
【課題】ブレーキ・バイ・ワイヤシステムにおけるブレーキ力の増減時の応答性を簡単な構成で運転者の感覚に合うようにする。
【解決手段】ブレーキペダルのストロークを操作量として操作量制動力変換回路31に入力し、その出力信号を増加用ローパスフィルタ32と減少用ローパスフィルタ33とに入力し、各出力を最大値選択回路34により大きい方を選択し、各ローパスフィルタの出力の大きい方で制御目標値Bmaxを生成し、制御目標値Bmaxが最終的な制動力目標値となる。ブレーキ操作量に対する制動力目標値の応答遅れを、ブレーキ操作量の増加側では小さく、ブレーキ操作量の減少側では大きくすることができ、各ローパスフィルタのカットオフ周波数(時定数)を調整するという簡単な構成で、運転者に違和感の無いブレーキフィーリングを与えることができる。
(もっと読む)
車両の動力伝達制御装置
【課題】HV−MT車について、運転フィーリングを通常MT車の運転フィーリングに一致させたいという要求を考慮しながらエネルギー効率(燃費)を向上すること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関とモータ(MG)とを備えたハイブリッド車両に適用され、手動変速機と、摩擦クラッチとを備える。MGトルクが車両減速側の回生トルクに調整されている状態において、運転者によるクラッチペダル操作によりクラッチが完全分断状態に移行したとき(t2)、回生トルクの大きさが「ゼロより大きい微小値A」まで減少させられ、その後、微小値Aに維持される。クラッチの完全分断状態への移行に伴って回生トルクが直ちにゼロに調整される場合と比べて、回生により発生するより多くのエネルギーをバッテリに蓄えることができ(ドットで示した領域を参照)、エネルギー効率(燃費)が向上する。
(もっと読む)
走行制御支援方法及び走行制御支援装置
【課題】安全性を低下させることなく、コストをかけずに、警報時間の短縮効果が得られる走行制御を支援する。
【解決手段】列車2が踏切3に接近すると、車上装置21は、自らの列車2の位置・速度情報を所定の間隔で踏切制御装置31に送信する。踏切制御装置31は、車上装置21から受信する列車の位置及び速度に基づいて踏切到達予測時間及びブレーキパターン到達予測時間を算出する。また、踏切制御装置31は、予め記憶する設計警報時間と、算出される踏切到達予測時間を比較するとともに、予め記憶する踏切遮断完了時間と、算出される踏切遮断完了時間を比較し、所定の条件を満たす場合には警報を開始するように指示する。踏切制御装置31が、警報開始後に列車2を加速させる走行制御パターンを算出し、車上装置21に送信する。そして、車上装置21は、算出される走行制御パターンを乗務員に提示し、乗務員による走行制御を支援する。
(もっと読む)
車両用動力分割装置
【課題】動力分割機構24のリングギアRにオルタネータ40を機械的に連結するのみでは、回生運転時において、駆動輪16側からフライホイール36側への動力の伝達量が十分とならないこと。
【解決手段】動力分割機構24は、1の遊星歯車機構によって構成されており、そのキャリアCには、駆動輪16が機械的に連結され、サンギアSには、フライホイール36が機械的に連結されている。リングギアRに、オルタネータ40に加えて、オイルポンプ44の従動軸を機械的に連結する。これにより、回生運転時にリングギアRに加わる負荷トルクを大きくすることができ、ひいては駆動輪16からフライホイール36に伝達される動力を大きくすることができる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン始動時にクラッチを係合する際に、エンジンが逆回転するのを抑制可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、クラッチ同期制御手段と、ポンピングロス制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。クラッチ同期制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、エンジンの始動前に、第1回転電機のトルクに基づきクラッチの係合要素の回転を同期させる制御を行う。ポンピングロス制御手段は、上述の制御時に、ポンピングロスを大きくする制御を行う。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
車両用制御装置
【課題】エンジンの自動停止中にスタータの駆動回路やエアコンシステム等の車載機器に異常が生じる状況下において、ユーザに車両の退避走行等の適切な対応をとらせる。
【解決手段】車両の走行中においてもエンジン10の自動停止が許可されるアイドルストップ制御(減速時IS制御)が行われる車両においてエンジン10の自動停止中において、ISS−ECU68やスタータ56の駆動回路等に異常が生じたと判断されて且つ車両が走行中であると判断された場合、エンジン10の再始動処理を強制的に行う。
(もっと読む)
21 - 40 / 1,407
[ Back to top ]