
Fターム[5H115QN08]の内容
車両の電気的な推進・制動 (204,712) | 制御、演算 (10,339) | フィードバック制御するもの (3,031) | 電気的変量をフィードバックするもの (1,377)
Fターム[5H115QN08]の下位に属するFターム
電流フィードバックするもの (342)
Fターム[5H115QN08]に分類される特許
81 - 100 / 1,035
動力伝達装置
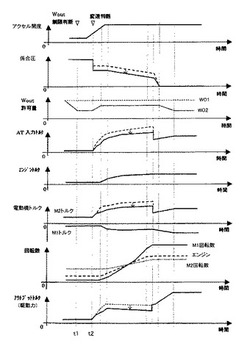
【課題】蓄電装置の耐久性を向上させることを課題とする。
【解決手段】動力伝達装置は、車両用の動力伝達装置であって、電動機と、無段変速部と、有段変速部と、蓄電装置と、を有する。無段変速部は、駆動源からの出力が入力され、前記電動機により差動状態が制御される。蓄電装置は、第1蓄電部、及び、第1蓄電部よりも入出力特性が優れた第2蓄電部を有し、有段変速機の変速制御により電動機と授受される電力を第2蓄電部に蓄電する。また、動力伝達装置は予測部と制御部とを備える。予測部は、車両の走行状況による駆動力伝達変化を予測する。制御部は、予測部により駆動力伝達変化が予測された場合には、変速制御時における蓄電装置と電動機との間で授受される電力量を制限する。これにより、駆動力伝達変化が生じることによる蓄電装置の耐久性低下を防ぐことができる。
(もっと読む)
ハイブリッド車両の制御装置および制御方法

【課題】内燃機関の動力を用いて回転電機で発電した電力を蓄電装置に充電可能に構成されたハイブリッド車両において、蓄電装置に充電される電力が充電可能電力を超えるのを防止しつつ、内燃機関の出力制御性を確保する。
【解決手段】ECUは、実エンジントルクが目標エンジントルクに近づけるためのフィードバック量efbを算出し、算出されたフィードバック量efbの絶対値をefbガード値以下に制限した値を、スロットル開度に反映させる。ECUは、efbガード値を、バッテリ温度がT1よりも低い範囲R1では「0」よりも大きい値に設定し、そうでない範囲R3では「0」に設定する。さらに、ECUは、バッテリ温度がT2〜T1度の間に含まれる範囲R2では、バッテリ温度の増加に応じてefbガード値の絶対値を最大値から0まで徐々に減少させる。
(もっと読む)
シリーズハイブリッド車両の制御装置
【課題】直流バス電圧に対応してバッテリの出力を適切に制御できる制御装置を提供することを目的とする。
【解決手段】バッテリ23の目標出力PBとバッテリ23の充電率SOCに基づいて直流バス8に対する直流バス電圧指令値Vbus*を設定し、バッテリ目標出力PBに達するようにバッテリ23から直流バス8に対する出力を制御する。そして、直流バス8へのバッテリ23からの出力がバッテリ目標出力PBに達すると、直流バス電圧指令値Vbus*にコンバータ21の直流電圧レベルが近づくように発電機2からの電力量を制御する。
(もっと読む)
ハイブリッド車およびその制御方法
【課題】停車時にバッテリを充電する際の充電電力の変動を抑制する。
【解決手段】モータMG1を駆動するためのインバータをゲート遮断した状態でエンジンを目標回転数Nsetで自立運転してモータMG1の回転によって発生する逆起電力を用いてバッテリを充電する際には(S150〜S170)、目標充電電力Pb*と充電電力Pbとの差が小さくなるように高電圧系の目標電圧VH*を設定し(S180)、高電圧系の電圧VHが目標電圧VH*となるよう昇圧回路55を制御する(S190)。これにより、充電電力Pbが目標充電電力Pb*から大きく外れて変動するのを抑制することができる。この結果、バッテリの低温時などバッテリの入力制限が大きく制限されているときでも、充電電力Pbが入力制限を超えてしまうのを抑制することができる。
(もっと読む)
車両用の電源装置及びこの電源装置を搭載する車両
【課題】回路構成を簡単にしながら、走行用バッテリの漏電とコンタクタの溶着を検出する。
【解決手段】車両用の電源装置は、モータ22に電力を供給する走行用バッテリ1と、走行用バッテリ1の出力側を、中点を車両のシャーシーアース30に接続してなる直列コンデンサー24に並列に接続している車両側負荷20に接続するコンタクタ2と、コンタクタ2と並列に接続されて車両側負荷20の負荷コンデンサー23をプリチャージするプリチャージ抵抗7とプリチャージリレー6との直列回路からなるプリチャージ回路3と、プリチャージリレー6とコンタクタ2をオンオフに制御する制御回路4と、走行用バッテリ1とシャーシーアース30との漏電を検出する漏電検出回路5とを備えている。電源装置は、制御回路4がプリチャージリレー6をオンオフに切り換える状態で、漏電検出回路5が漏電状態の変化を検出してコンタクタ2の溶着を検出する。
(もっと読む)
車両用電源装置
【課題】異なる特性を有する電力貯蔵装置を搭載し、性能が向上した車両用電源装置を提供する。
【解決手段】制御装置30は、第1の電力変換器および第2の電力変換器(昇圧コンバータ12Bおよび12C)を協働させることにより、第1の電力貯蔵装置(バッテリB)と電気負荷との間の双方向送電、第2の電力貯蔵装置(キャパシタ23)と電気負荷との間の双方向送電、および第1の電力貯蔵装置と第2の電力貯蔵装置との間の双方向送電を実現する。
(もっと読む)
車両の駆動制御装置
【課題】バッテリの蓄電率が低い場合におけるドライバビリティの低下を防止できる車両の駆動制御装置を提供する。
【解決手段】第1モータ・ジェネレータに発電させつつ内燃機関3及び第2モータ・ジェネレータ7の両者を駆動源とするハイブリッド走行モードと内燃機関3を停止させた状態で第2モータ・ジェネレータ7を駆動源とする電気走行モードとを要求駆動力に応じて選択的に実行させ、かつバッテリ8の蓄電率が高い場合は低い場合に比べて電気走行モードを優先的に実行させる。ハイブリッド走行モードが実行される場合にクラッチCが係合状態に操作され、かつ電気走行モードが実行される場合にバッテリ8の蓄電率が高いときはクラッチCが解放状態に、バッテリ8の蓄電率が低いときはクラッチCが係合状態にそれぞれ操作されるようにクラッチCを制御する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】モード切替可能なハイブリッド車両において、動力伝達効率の低下を抑制することができるハイブリッド車両の制御装置を提供する。
【解決手段】走行モードとして、EVモードと、シリーズモードと、パラレルモードと、を有するハイブリッド車両の制御装置において、SOCが高いときに、前記EVモードと、前記パラレルモードとの間で走行モードを走行状態に応じて切り替える高SOC走行状態となり、SOCが低いときに、前記シリーズモードと、前記パラレルモードとの間で走行モードを走行状態に応じて切り替える低SOC走行状態となり、高SOC走行状態ではでは、現在のバッテリ22の充電状態で、ハイブリッド車両がEVモードで走行可能な距離である予測走行可能距離L2が、所定距離L1より小さい場合、EVモードとパラレルモードとの間の切り替えを前記パラレルモードに切り替わりやすくする。
(もっと読む)
電動車両
【課題】携帯端末の車室内への置き忘れを防止することでユーザの負担を軽減し商品性の向上を図ることができる電動車両を提供する。
【解決手段】外部充電の充電コネクタが接続されたことを検知した場合に、乗員を検知せず、かつ携帯端末を検知したときに、携帯端末の置き忘れと判定し、この際に、車両装備品であるヘッドライト、ウィンカー、ルームランプなどと、車両用携帯品であるキー端末などとのうち少なくとも何れか一つを用いて携帯端末の置き忘れ状態を車両外部に警告する。
(もっと読む)
駆動装置及び車両
【課題】斜面に停車させた車両が滑落することを容易かつ効果的に抑制する駆動装置や、当該駆動装置を備える車両を提供する。
【解決手段】駆動装置1は、電力を供給するバッテリ11と、バッテリ11から供給される電力を変換するインバータ12と、インバータ12から供給される電力によって車両を駆動する動力を発生するモータ13と、インバータ12における電力の変換を制御するインバータ制御部14と、車両の速度を測定する速度測定部15と、車両の傾斜度を測定する傾斜度測定部16と、車両の重量を測定する重量測定部17と、を備える。インバータ制御部14は、重量測定部17が測定する車両の重量と、傾斜度測定部16が測定する傾斜度とに基づいて、車両にかかる斜面に沿って下向きの力を求め、当該力を相殺する力がモータ13から発生するように、インバータ12を制御する。
(もっと読む)
車両の制御装置
【課題】SOCを目標に近づけつつ、燃費を向上させることが可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、ハイブリッド車両に搭載され、内燃機関と、回転電機と、蓄電手段と、変速部と、フィードバック制御手段と、制御手段と、を備える。蓄電手段は、回転電機へ電力を供給すると共に、回転電機の回生電力を充電する。フィードバック制御手段は、蓄電手段の蓄電状態に対応する状態量を、所定のフィードバックゲインに基づきフィードバック制御する。制御手段は、内燃機関のトルクを高め、駆動力を調整するため回転電機によって発電させる場合において、内燃機関のトルクが最適燃費動作線上のトルクよりも低い場合のフィードバックゲインを、内燃機関のトルクが最適燃費動作線上のトルクよりも高い場合のフィードバックゲインよりも大きくする。
(もっと読む)
ハイブリッド式作業機械
【課題】ミニショベルのような小型の建設機械において、簡易なハイブリッド方式を採用することで燃費の向上、排ガス特性の改善及び騒音の低減を図り、かつ排出ガス規制をクリアできる安価なハイブリッド式作業機械を提供する。
【解決手段】エンジン出力馬力の制限値HELeが油圧ポンプ21のPQ馬力特性Dにより近接した設定とし、エンジン11をダウンサイジングする。走行高速時にバッテリ33により発電・電動機31を電動機として作動させて出力アシストを行う。バッテリ33の充電時は、トルク制御電磁弁44に制御信号を出力して減トルク制御を行い、エンジン11の余剰トルクを強制的に作り出し、急速充電を行う。
(もっと読む)
列車モニタ・データ伝送システムを有する列車制御装置
【課題】常に編成全体として粘着限界値に近いトルクを発生させて粘着力の有効利用を図ることができる列車制御装置を提供すること。
【解決手段】先頭電動車の電気車制御装置B1で空転あるいは滑走を最初に検知すると、そのときの接線力係数Muj(B1)を推定し、この接線力係数と、先頭車から後方の車両における粘着係数の増大量データDeltaMujと、計画トルク指令値Tauczjをもとに、各電気車制御装置B1,Ajにおける実際に発生すべきトルク指令値上限値Taujmax_actを求め、車両モニタ・データ伝送システム1を介して各電気車制御装置に対して伝送する。各電気車制御装置B1,Ajでは、上記トルク指令値上限値Taujmax_actを目標値として、各電気車制御装置の制御対象範囲の電動機でトルクを制御する。
(もっと読む)
燃料電池システム
【課題】燃料電池の間欠運転時における二次電池の過充電を防止する。
【解決手段】FC要求電圧算出部110は、燃料電池の間欠運転時に、高電位化回避閾値電圧を下回る所定電圧を、FC要求電圧Vrfとして算出し、コンバータへ出力する。FC要求電圧補正部は、燃料電池の間欠運転時に、燃料電池システムとして許容できるシステム許容パワーPsyから燃料電池の発電パワーPfcを引いた偏差Dが値0以下となったときに、偏差Dが値0となるようにコンバータへの指令値を補正する。
(もっと読む)
鉄道車両用渦電流ブレーキ装置
【課題】蓄電池を搭載するのみでその他の電源を要しない鉄道車両用渦電流ブレーキ装置を提供する。
【解決手段】鉄道車両用渦電流ブレーキ装置において、渦電流ブレーキ装置を搭載する鉄道車両に蓄電池1を搭載し、この蓄電池1を前記渦電流ブレーキ装置の電源回路として完全に独立して動作させ、かつ前記蓄電池1の放電に備えて前記蓄電池1の蓄電残量値7をモニタし、この蓄電残量値7が予め設定された一定値を下回った場合、前記鉄道車両の走行中に渦電流ブレーキ装置を動作させ、自車の蓄電池1に充電する。
(もっと読む)
電動車両
【課題】ユーザの要望に応じて回生音の発生をコントロールできる電動車両を提供する。
【解決手段】バッテリから電力供給を受けて走行用動力を出力可能であるとともに車両の回生制動時に発電を行う第1のモータ14を備えたハイブリッド車両1であって、第1のモータ14による回生制動の使用比率を変更するための操作スイッチ56が設けられている。
(もっと読む)
車両用駆動装置
【課題】小型化が可能であって精度よく磁石温度によって変化する磁石磁束を算出できる車両用駆動装置を提供する。
【解決手段】エンジン6と、永久磁石72aを内蔵したモータ7と、第1クラッチ41を介してエンジン6に連結されるとともにモータ7に連結され第1変速用シフター51により複数のギヤを選択可能な第1主軸11と、第2クラッチ42を介してエンジン6に連結され第2変速用シフター52により複数のギヤを選択可能な第2中間軸16と、を備え、モータ7の電圧、電流、インダクタンス、回転数から永久磁石72aの磁石磁束を算出して、トルク指示値を補正するECU5を備え、ECU5は、磁石磁束の算出が所定時間以上行なわれていない場合であって、且つ、モータ7の回転数が所定回転数以上又は前記モータの電圧振幅が所定振幅以上の場合に、磁石磁束の算出を行なう。
(もっと読む)
編成車両の制御方法及び制御装置
【課題】各エンジンの出力時間積算値(電力量)が均一にし、各エンジンのメンテナンス周期の統一化を図る。
【解決手段】エンジン3a〜3cと発電機4a〜4cとコンバータ装置5a〜5cとインバータ装置6a〜6cと空調等の補助機器に電力を供給する補助電源装置7a〜7cをコンバータ装置5a〜5cとインバータ装置6a〜6cの間の直流部に備えた鉄道車両を複数両連結した編成車両において、統括制御装置12が、該エンジン3a〜3cの出力時間積算値を均一化するように、該統括制御装置が該エンジン3a〜3cの出力指令及び稼動時間指令(起動・停止指令)を演算し、該出力指令及び該稼動時間指令(起動・停止指令)に基づいて、該エンジン3a〜3cの出力及び稼動時間を調整する。
(もっと読む)
走行可能距離算出装置及びこれを用いた車両
【課題】簡易に、かつ、現在の走行状態を反映して正確に走行可能距離を予測することができる走行可能距離算出装置及びこれを用いた車両を提供する。
【解決手段】走行可能距離算出装置は、単位走行距離当たりの最新の電力消費率を算出する電力消費率算出手段3と、記録部に記録された複数の過去の電力消費率を更新し、前記記録部に記録する電力消費率更新手段4と、前記記録部に記録された複数の電力消費率と二次電池の電池残量とから走行可能距離を算出する走行可能距離算出手段5とを備え、電力消費率更新手段は、所定の条件が満たされている場合には、記録された複数の電力消費率を全て設定された所定のデフォルト電力消費率に更新し、それ以外の場合には、記録部に記録された複数の過去の電力消費率のうち、前記電力消費率算出手段により算出された最新の電力消費率と最も偏差の大きい過去の電力消費率を、最新の電力消費率に更新する。車両Iはこれを有する。
(もっと読む)
自動走行車駆動用モータ制御装置
【課題】 自動走行車の車輪のスリップを抑制しつつ、安定して自動走行車を駆動させるための自動走行車駆動用モータ制御装置を得る。
【解決手段】自動走行車を駆動するモータ4のモータ速度を求めるモータ速度検出手段11と、自動走行車の車体速度を求める車体速度検出手段12と、モータ速度がモータ速度を制御するための速度指令に応じた指令に追従するようにモータ4を制御する速度制御手段10と、速度指令を上位から入力し、速度指令で指令する速度が所定の速度範囲内にある場合は、速度指令を速度制御手段にそのまま出力し、速度指令で指令する速度が速度範囲内にない場合は、指令速度を速度範囲内の速度に補正し、補正した速度指令を制限速度指令として速度制御手段に出力する速度指令制限手段13と、を備え、速度指令制限手段13は、速度範囲の上限値及び下限値を、車体速度に基づき算出する。
(もっと読む)
81 - 100 / 1,035
[ Back to top ]