
Fターム[5H115SE05]の内容
車両の電気的な推進・制動 (204,712) | 主な制御対象 (12,865) | エンジン (1,876)
Fターム[5H115SE05]に分類される特許
161 - 180 / 1,876
ハイブリッド車両の制御装置
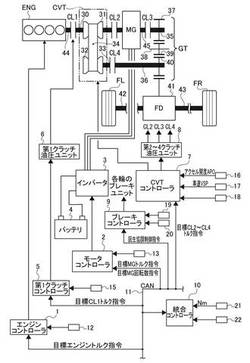
【課題】走行中、モータ走行モードによる走行領域を拡大し、回生エネルギーの回収量向上と燃費の向上を図ること。
【解決手段】ハイブリッド車両の制御装置は、エンジンENGと、モータジェネレータMGと、プライマリプーリ31と、セカンダリプーリ32と、第1クラッチCL1と、第2クラッチCL2と、エンジン始動制御手段(図6)と、を備える。エンジン始動制御手段(図6)は、モータ走行モードからのエンジン始動時、第2クラッチCL2を開放してプライマリプーリ31およびセカンダリプーリ32をモータジェネレータMGから切り離した状態で、第1クラッチCL1を締結し、プライマリプーリ31およびセカンダリプーリ32に蓄積されたエネルギーを使ってエンジンENGを始動する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】ハイブリッド車両において、歯打ち音の回避制御に起因するドライバビリティの低下を抑制する。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)及び電動機(MG2)を含む動力要素と、駆動軸と、動力伝達機構(300)とを備えたハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、電動機のトルクが発生領域であるか否かを判定する第1判定手段(120)と、電動機のトルクが発生領域であると判定された場合に、内燃機関のトルク変動が小さくなるように回避制御を行う回避手段(140)と、電動機のトルクが発生領域に近づいているか否かを判定する第2判定手段(110)と、電動機のトルクが発生領域に近づいていると判定された場合に、回避制御における内燃機関の運転状態の変化が小さくなるように予備回避制御を行う予備回避手段(130)とを備える。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
自動車用駆動システム及びその制御方法
【課題】減速時などに省エネのためエンジン停止制御指令を発してから実際にエンジンが止まるまでのエンジンからワンウェイ・クラッチの入力部材までの慣性力を有効利用する。
【解決手段】第1のエンジンENG1の下流側に、無限・無段変速機構BD1よりなるトランスミッションTM1が設けられ、その出力側にワンウェイ・クラッチOWC1が設けられ、第1のエンジンの出力軸にサブモータジェネレータMG2が接続された駆動システムにおいて、減速時などにエンジンを停止させる制御が実行された際に、実際にエンジンが停止するまでのエンジンからワンウェイ・クラッチの入力部材までの慣性力を、無段変速機構BD1の変速比可変機構112の駆動操作のアシスト力として利用すると共に、サブモータジェネレータMG2により電気エネルギーとして回生させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、アイドル運転時と負荷運転時とで異なる手法でスロットル開度をフィードバック制御する場合においてもエンジン出力を正確に制御する。
【解決手段】ECUは、アイドル運転時はISC制御によってスロットル開度をフィードバック制御し、負荷運転時はPe−F/B制御によってスロットル開度をフィードバック制御する。Pe−F/B制御中は、ISC制御時のフィードバック量eqiおよびPe−F/B制御時のフィードバック量efbが用いられる。ECUは、eqiが更新された場合、VVT進角フェイルが発生したという条件を含む第1〜第7の条件のいずれもが成立していないときはefbからeqiの変化分に相当する量を相殺する相殺補正を行ない、第1〜第7の条件の少なくともいずれか1つの条件が成立しているときは相殺補正を行なわない。
(もっと読む)
ハイブリッド車両の制御装置
【課題】登坂シーンで車両がずり下がる際、バッテリの過充電を防止しつつ、回生による車両のずり下がりを抑制すること。
【解決手段】ハイブリッド車両の制御装置は、エンジン3と、発電機5,6と、バッテリ8と、駆動機10,11と、ダイレクト配電制御手段(図2)と、車両ずり下がり対応制御手段(図7)と、を備える。ダイレクト配電制御手段(図2)は、発電機5,6が発電した実発電電力を過不足なく駆動機10,11の駆動電力として消費するように、駆動要求に応じて発電電力を制御する。車両ずり下がり対応制御手段(図7)は、ダイレクト配電による発電制御中、駆動トルク指令値の符号が反転せずに駆動回転数の符号が反転したとき、駆動機10,11を回生させる制御を行うとともに、発電機5,6を力行させる制御を行う。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、歯打ち音に起因するドライバビリティの低下を抑制する。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)及び電動機(MG1,MG2)を含む動力要素と、蓄電手段(12)と、駆動軸と、動力伝達機構(300)とを備えたハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、内燃機関及び電動機のトルクを夫々決定するトルク決定手段(110)と、電動機のトルクを発生領域とならないように調整する調整手段(120)と、電動機に対する蓄電手段による充電及び放電を所定間隔で相互に切替えて、電動機のトルクの正負を変化させる切替手段(130)と、内燃機関及び電動機の少なくとも一方のトルクを、内燃機関のイナーシャトルクに応じて補正する補正手段(140)とを備える。
(もっと読む)
車両用動力伝達装置用制御装置
【課題】差動機構を高回転化から保護しつつエンジントルク低下を補うことが可能な車両用動力伝達装置用制御装置を提供する。
【解決手段】許容回転速度設定手段96は、所定の加速操作量OPAC及びエンジン回転速度Neのときにエンジン14から出力されるエンジントルクTeが、エンジン14の出力トルク特性を示す予め設定された関係から上記所定の加速操作量OPAC及びエンジン回転速度Neに基づいて定まる基準エンジントルクTesよりも低いと判断された場合には、そうでない場合と比較して、差動機構である第1遊星歯車装置20の許容入力回転速度N1inを高く設定する。従って、許容入力回転速度N1inの制限によって第1遊星歯車装置20を高回転化から保護することが可能であると共に、許容入力回転速度N1inの変更に応じてエンジン回転速度Neを引き上げてエンジントルクTeを上昇させエンジントルク低下を補うことが可能となる。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
ハイブリッド自動車
【課題】段差を乗り越える際のアクセル操作に対して運転者に違和感を与えるのを抑制すると共に運転者により適正なフィーリングを与える。
【解決手段】エンジン指令パワーが始動停止閾値未満の範囲内において、エンジンの運転が停止されている状態で運転者に段差を乗り越える意思があると判定されたときには(S100)、エンジンを始動してアクセル開度が大きいほど大きくなる傾向の自立目標回転数でエンジンを自立運転し(S110,S120)、その後に運転者に段差を乗り越える意思が無くなったと判定されたときに(S130)、エンジンの運転を停止する(S140)。これにより、車両が段差を乗り超える際のアクセル開度の増加によりエンジンが始動されたときに与え得る運転者への違和感を抑制し、段差を乗り越える際のアクセル操作に対してより適正なフィーリングを運転者に与えることができる。
(もっと読む)
変速制御装置
【課題】回生トルクがかかっている際の掛け替え変速において発生しうる戻し変速における変速ショックを回避する技術の実現。
【解決手段】第1の変速段から第2の変速段への変速指令があった後、第1の変速段へ戻す戻し変速指令があった場合に、変速プロセスの進行による入力部材の回転速度の変化が所定の回転変化しきい値未満の範囲では、駆動力源の負方向の出力トルクの絶対値が所定の判定しきい値以上である負トルク状態であることを条件として、第1の変速段への戻し変速プロセスが禁止される。
(もっと読む)
ハイブリッド車
【課題】浄化装置の浄化触媒の暖機要求がなされているときにおいて、内燃機関での燃焼が安定しにくくなるなどの不都合を抑制する。
【解決手段】浄化触媒の暖機要求時において、触媒温度Tcが閾値Tcref未満のときには、第1所定運転ポイント(回転数Ne1およびトルクTe1)でエンジンを継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジンと二つのモータとを制御し(S150,S250〜S290)、触媒温度Tcが閾値Tcref以上のときには、第1所定運転ポイントに比してエンジンからの出力が大きくなる範囲内の第2所定運転ポイント(回転数Ne2およびトルクTe2)でエンジンを継続して運転しながら走行用パワーPdrv*に基づくパワーによって走行するようエンジンと二つのモータとを制御する(S160〜S200,S250〜S290)。
(もっと読む)
車両の制御装置
【課題】内燃機関の始動条件が異なる複数の走行モードを備える車両において、排気の悪化を精度よく検出する。
【解決手段】ECUは、CDモード中である場合(S30にてYES)、排気悪化条件を「失火回数Nが所定回数N1よりも大きい」という条件に設定する。一方、ECUは、CSモード中である場合(S30にてNO)、排気悪化条件を「失火回数Nが所定回数N2よりも大きい」という条件に設定する。所定回数N2は、所定回数N1よりも多い値に設定される。ECUは、各走行モードにおいて排気悪化条件が成立した場合(S31にてYESまたはS32にてYES)、失火カウンタCを1だけ増加させ(S33)、失火カウンタCが所定値C0以上である場合(S34にてYES)、排気が悪化していると判定する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】ハイブリッド車両において、燃費の悪化を防止しつつ、エンジン始動時の振動を抑制する。
【解決手段】ハイブリッド車両の制御装置(100)は、内燃機関(200)と、内燃機関のクランク軸(205)への動力伝達が可能な回転電機(MG1)とを備えるハイブリッド車両(1)を制御する。ハイブリッド車両の制御装置は、内燃機関の停止中に、クランク軸のクランク角を検出するクランク角検出手段(206)と、検出されたクランク角に基づいて、予め設定された複数の目標クランク角範囲から、少なくとも1つの目標クランク角範囲を選択する選択手段(121,122)と、内燃機関の始動開始前に、クランク軸のクランク角が選択された目標クランク角範囲となるように、回転電機から制御トルクを出力させてクランク軸を制御する制御手段(170)とを備える。
(もっと読む)
車両の制御装置
【課題】差動回転機構の所定の回転要素を確実に制動した状態で内燃機関を始動することが可能な車両の制御装置を提供する。
【解決手段】キャリアCaに内燃機関11が、サンギヤSuに第1MG12が、リングギヤRiに出力部19がそれぞれ連結された遊星歯車機構16を備えた駆動装置10が搭載された車両1に適用される制御装置において、駆動制御装置40は、所定の始動条件が成立した場合、リングギヤRiと出力部19との間の動力伝達が阻止されるとともにリングギヤRiが制動されるようにドグクラッチ機構17を制御し、次に第1MG12が所定の出力トルクで動作するように第1MG12の動作を制御し、その後所定の出力トルクで動作するように制御されている第1MG12の角速度の変化が所定の許容範囲内の場合に内燃機関11が始動されるように第1MG12の動作を制御する。
(もっと読む)
ハイブリッド車
【課題】走行中に内燃機関を停止する際の内燃機関での余分な燃料消費を抑制する。
【解決手段】車速Vが閾値Vpr未満である間欠許容車速条件を含む停止条件が成立したときであって吸気バルブの開閉タイミングVTが最遅角タイミングになっているときにエンジンを停止するものにおいて、車速Vが閾値Vpr以上かつ値(Vpr+α)未満で車速変化率ΔVが閾値ΔVref未満でアクセルオフのときには(S120〜S140)、停止条件の成立が予測されると判断し、吸気バルブの開閉タイミングVTが最も遅いタイミングである最遅角タイミングに変更されるよう可変バルブタイミング機構を制御する最遅角処理の実行を開始する(S160)。
(もっと読む)
車両用エンジン始動制御装置
【課題】エンジンと電動機とを備えた車両用駆動装置において、エンジン始動のために必要とされる電動機の最大出力トルクを低減することができる車両用エンジン始動制御装置を提供する。
【解決手段】エンジン始動制御手段180は、エンジン10を始動するために電動機MGでエンジン回転速度Neを引き上げるクランキング制御を行い、そのクランキング制御では、電動機MGからエンジン10までの動力伝達系の共振周波数fRSで電動機トルクTmgを脈動させる。そして、その共振周波数fRSは少なくとも電動機慣性モーメントIMGとダンパ36のねじり弾性定数kDPとに基づいて予め求められる。従って、前記クランキング制御において、前記電動機MGからエンジン10までの動力伝達系の共振により電動機トルクTmgが増幅されてエンジン10に伝達されるので、エンジン始動のために必要とされる電動機MGの最大出力トルクを低減することができる。
(もっと読む)
車両用駆動装置の制御装置
【課題】車両走行中のエンジン停止時においてエンジンが始動されるときにショックが発生するのを抑制することができる車両用駆動装置の制御装置を提供する。
【解決手段】車両がコースト走行中であってエンジン停止中であるときにおいて自動変速機18がシフトされる際に、エンジン12のクランク軸14が予め設定された始動位置に位置するように第1電動機MG1を制御するクランク軸位置制御手段70を含む。このクランク軸位置制御手段70は、上記シフトの開始から終了までの間、そのシフト直前に前記始動位置に位置するクランク軸14の回転角を維持するための回転ロック電流ILOCKを、第1電動機MG1に供給するものである。
(もっと読む)
ハイブリッド車の制御装置
【課題】ハイブリッド車の制御装置に関し、エンジン走行中にエンジンの出力が過剰になったらエンジンの不要な吹け上がりやこれによるエンジンのオーバーランを防止しながらクラッチを開放することができるようにする。
【解決手段】電動モータ1及びエンジン2を走行用駆動源として備えたハイブリッド車の制御装置において、エンジン2からの駆動力を車両の駆動輪に伝達可能とする動力断接クラッチ4と、エンジン2に接続された発電機3と、エンジンの状態量を検出する状態量検出手段74と、車両の状態に基づいてエンジンから出力されるべき目標状態量を算出する目標状態量算出手段75と、動力断接クラッチ4が接続されてエンジンの駆動力により車両が走行している際に状態量と目標状態量との差が所定量以上となると、発電機3でエンジンの回転数を抑制し、エンジンの回転数抑制が始まった後に動力断接クラッチ4を開放させる制御手段7とをそなえる。
(もっと読む)
車両用動力伝達装置
【課題】遊星歯車機構を利用してエンジンの減速比と電気モータの減速比を制御する技術において、エンジンの減速比と電気モータの減速比の対応関係を可変とする。
【解決手段】エンジン1の発生する動力が第1遊星歯車機構Peのキャリアに入力され、モータMGの発生する動力が第2遊星歯車機構Pmのサンギアに入力され、第1遊星歯車機構Peのリングギアおよび第2遊星歯車機構Pmのキャリアからの動力を結合して車両の駆動輪の車軸に伝達し、エンジン1の動力が第1遊星歯車機構Peのキャリアに入力される状態を保ちながら、第1遊星歯車機構Peのサンギアの回転を第1クラッチC1、第2クラッチC2、第1ブレーキB1のいずれかで規制し、また、モータMGの動力が第2遊星歯車機構Pmのサンギアに入力される状態を保ちながら、第2遊星歯車機構Pmのリングギアの回転を第2ブレーキB2、第3クラッチC3のいずれかで規制する。
(もっと読む)
161 - 180 / 1,876
[ Back to top ]