
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
1,961 - 1,980 / 5,473
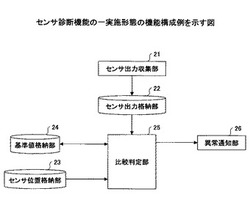
センサ診断方法及びセンサ診断装置
【課題】センサ診断方法で、センサに自己診断機能を設けることなく各センサが正常に動作しているか否かを診断することができることを目的とする。
【解決手段】物体を識別する複数のセンサそれぞれで得た識別情報をセンタ装置に集約するセンサシステムの各センサの診断を行うセンサ診断装置であって、所定時間における前記複数のセンサの識別情報から、各センサとその近隣のセンサ間での移動物体数を計測する移動物体数計測手段と、各センサとその近隣のセンサ間で予め設定された基準値を格納する基準値格納手段と、各センサとその近隣のセンサ間で計測された移動物体数に基づく値を、前記基準値格納手段から読み出した前記各センサとその近隣のセンサ間の基準値と比較して、前記移動物体数に基づく値と前記基準値との偏差が閾値を超えたとき前記移動数を計測したセンサを異常と判定する比較判定手段とを有する。
(もっと読む)
駐車場システム

【課題】優良顧客に不満を感じさせず、また一般顧客が感じるメリットを低下させないことにより、店舗における売り上げの低下が抑えられる駐車場システムを提供する。
【解決手段】駐車場に入場する車両のナンバープレートに表記されている登録番号が、顧客管理装置1の顧客テーブル13aに登録されており、且つ対応付けられている第1の期間の取引合計金額が予め定めた判定金額に達していれば、ゲート開閉装置2が入口ゲート2aを開する。一方、駐車場に入場する車両のナンバープレートに表記されている登録番号が、顧客管理装置1の顧客テーブル13aに登録されていなかったり、登録されているが対応付けられている第1の期間の取引合計金額が予め定めた判定金額に達していなければ、ゲート開閉装置2が駐車券を発券し、その後、入口ゲート2aを開する。
(もっと読む)
露出制御装置及び露出制御プログラム
【課題】認識対象物の明るさに応じた露出制御を安定して行うことのできる露出制御装置を提供する。
【解決手段】前方車両の明るさを検出するための台形状の障害物(認識対象物)用領域と、路面の明るさを検出するための長方形状の路面用領域とからなる明るさ測定領域から画素を抽出し、抽出した画素に基づいて露出制御を行う。このため、前方車両の明るさ(障害物用領域の明るさ)のみに応じて露出制御を行う場合に比べ、日照条件やトンネル等による明るさの変化に対する応答性を保ちつつ、前方車両の移動、消失、出現等の変化に対して安定した露出制御を実現することができる。しかも、明るさ測定領域を過剰に大きくする必要がないため、処理負荷の増加も抑えることができる。
(もっと読む)
走行支援装置
【課題】先行車両である自車両だけではなく、後続車両についても信号機を通過することが可能となる走行支援を行う走行支援装置を提供する。
【解決手段】信号サイクル情報を読取る路車間通信機51と、自車両Aが信号機Sを通過することが可能な自車両Aの車速を算出する最低車速算出部55と、当該最低車速に基づいて自車両Aの走行支援を行う提供情報決定部59と、自車両Aの後続車両Bの状態を取得する後続車両状態取得部58とを備え、提供情報決定部59は、後続車両状態取得部58が自車両Aに後続車両Bが存在することを検知している場合は、後続車両状態取得部58が取得した後続車両Bの状態に応じて、後続車両Bも信号機Sを通過することが可能となるように自車両Aの走行支援を行う。これにより、先行車両である自車両Aだけではなく、後続車両Bについても信号機Sを通過することが可能となる。
(もっと読む)
自車位置認識装置及び自車位置認識プログラム、並びにナビゲーション装置
【課題】工事によって地物の位置が移動され、或いは地物の種別が変更された場合等であっても、誤って自車位置情報を補正することを抑制し、安定的に高い精度の自車位置認識を行うことが可能な自車位置認識装置等を提供する。
【解決手段】自車両の周辺の画像情報Gに含まれる地物の画像認識処理を行う地物画像認識手段18と、複数の地物の位置情報及び属性情報を含む地物情報Fを記憶した地物データベースDB2と、地物画像認識手段18による地物の画像認識結果と当該地物についての地物情報Fとを照合して自車位置情報Pを補正する自車位置補正手段19と、自車両が走行する道路について工事区間の情報を含む工事情報Wを取得する工事情報取得手段31と、工事情報Wに基づいて工事区間内での自車位置補正手段19による自車位置情報Pの補正を停止する補正停止手段35と、を備える。
(もっと読む)
撮影装置及びプログラム
【課題】 事故当事者のプライバシー侵害対策を講じる。
【解決手段】 衝突の発生またはそのおそれが高いことを検出する衝突検出手段(13)、衝突の発生またはそのおそれが高いことが検出されたときにその時点前後の映像をカメラで撮影して保存する第1の映像保存手段(17)、衝突の発生またはそのおそれが高いことが検出されたときに無線により撮影依頼信号を送信する第1の送信手段(15)、撮影依頼信号を受信する第1の受信手段(15)、撮影依頼信号を受信したときその時点前後の映像をカメラで撮影し暗号化して保存する第2の映像保存手段(17)、暗号化された映像を無線により送信する第2の送信手段(15)、暗号化された映像を受信する第2の受信手段(15)、暗号化された映像を受信したときその暗号化された映像を保存する第3の映像保存手段(17)を備える。
(もっと読む)
注意喚起装置
【課題】 運転者にとって対処することが困難な範囲を路面に実際に描画することによって、その範囲をリアルタイムで実際に表示する技術を提供する。
【解決手段】 運転者の死角範囲と運転者が避けきれない範囲と運転者の視野外範囲等は運転者が対処することが困難な範囲である。そこで、運転者が対処することが困難な路面上の範囲を特定する特定手段と、その特定手段で特定された範囲の路面を車両から照射してその範囲を実際に描画する車載式描画手段を車載する。すると、車両の運転者にとって対処することが困難な範囲を路面に実際に描画して表示することができ、周囲に居る歩行者等の注意喚起対象に対して、対処することが困難な範囲に居ることを直接的に知らせることができる。あるいは注意喚起対象に対して対処することが困難な範囲に侵入しようとしていることを直接的に知らせることができる。
(もっと読む)
近傍車両監視装置
【課題】自車両の近傍を走行する車両であって、自車両に関係があると推測される車両に関する情報を自車両の搭乗者に通知できる近傍車両監視装置を提供すること。
【解決手段】自車両の近傍を走行する近傍車両を監視する近傍車両監視装置100は、車車間通信を利用して近傍車両に関する情報を収集する近傍車両情報収集手段2と、自車両の近傍を走行した時間を近傍車両毎に計測する近傍車両監視手段10と、自車両の近傍を走行した時間が所定時間以上である近傍車両に関する情報を出力する近傍車両情報出力手段11と、を備える。
(もっと読む)
運転支援装置
【課題】不透明なフロントピラー部を使用しながら、その死角を排除することにより、運転者による安全な運転を支援する。
【解決手段】運転支援装置では、運転者から見てあたかも左右フロントピラー14L,14Rが存在しないかのように見えるように、左右フロントピラー14L,14Rの死角の範囲を含む映像をカメラ10により取得し、映像信号処理部130により変換し、左右ディスプレイ30L,30Rに表示する。さらに左右障害物センサ20L,20Rによって検知された障害物の位置(および距離)に基づき、警告判定部140により左右スピーカ40L,40Rから警告音または警告音声が出力される。このことにより、左右ディスプレイ30L,30Rに表示されている障害物の映像に対する運転者の注意がより強められ、運転者のより安全な運転を支援することができる。
(もっと読む)
脇見検出装置および方法、並びに、プログラム
【課題】運転者の脇見の危険度をより正確に認識する。
【解決手段】視線方向検出部21は、カメラ11により撮影された運転者の顔画像に基づいて、運転者の視線の方向を検出する。脇見検出部22は、運転者の視線の方向に基づいて運転者の上下方向および左右方向の脇見を検出するとともに、運転者が上下左右のいずれの方向に脇見をしているかに基づいて危険度を判定する。本発明は、例えば、車載用の脇見検出装置に適用することができる。
(もっと読む)
車載警報装置及び車両用警報方法
【課題】自車両以外の物体と他の物体とが接近する状況に遭遇する可能性に応じて物体に対して警報を出力する車載警報装置を提供する。
【解決手段】
自車両周辺に存在する他車両の位置その他の他車両に関する物体情報を取得する物体情報取得手段10と、取得した物体情報に基づいて、第1他車両が第2他車両と接近する状況に遭遇する可能性が高い状況として予め定義された物体情報に関する警戒パターンを参照し、他車両が接近等の状況に遭遇する可能性に係る関与度を算出する関与度算出手段20と、算出された関与度に応じて、その関与度が算出された他車両に関する警報を作成する警報作成手段30と、作成された警報を他車両に対して出力する出力手段40とを備える。
有する車載警報装置。
(もっと読む)
外界認識装置
【課題】
衝突判定を行う場合、自車情報に異常が発生するとシステムの機能が著しく低下する。
【解決手段】
外界認識装置は、自車の情報を取得する自車情報取得手段と、外界認識センサが検知した物体の情報を取得する物体情報取得手段と、自車情報取得手段が取得した自車情報に基づいて自車の予測進路を設定する予測進路設定手段と、物体情報取得手段が取得した物体情報と予測進路設定手段が設定した予測進路に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第1の衝突判定手段と、物体情報取得手段が取得した物体情報に基づいて外界認識センサが検知した物体と自車との衝突可能性を判定する第2の衝突判定手段と、自車情報取得手段が取得した自車情報の異常を判定する自車情報判定手段と、自車情報判定手段が、自車情報取得手段が取得した自車情報が異常と判定した場合、第2の衝突判定手段を選択する衝突判定選択手段とを備える。
(もっと読む)
地物情報収集装置及び地物情報収集プログラム、並びに自車位置認識装置及びナビゲーション装置
【課題】工事によって地物の位置が移動され或いは地物の種別が変更された場合等であっても、工事後の地物情報を迅速に収集することが可能な地物情報収集装置等を提供する。
【解決手段】自車両の周辺の画像情報Gに含まれる地物の画像認識処理を行う地物画像認識手段18と、工事区間の情報を含む工事情報Wを取得する工事情報取得手段31と、取得した工事情報Wを記憶する工事情報記憶手段DB3と、既に記憶された工事情報Wに係る工事区間に対応する道路の区間を自車両が走行する際に、当該工事情報Wが示す工事の終了を判定する工事終了判定手段36と、工事の終了が判定された場合には、当該工事情報Wに係る工事区間において地物画像認識手段18に地物の画像認識処理を行わせ、その画像認識結果と自車位置情報Pとに基づいて、画像認識された地物の位置情報及び属性情報を含む学習地物情報Fbを生成する地物学習手段41と、を備える。
(もっと読む)
停車案内装置
【課題】車両が交差点で停止しようとしたときに、右左折車両の走行エリア内に自車が進入しないように停止位置を案内する。
【解決手段】停車案内装置1は、制御装置3、位置検出器4、地図データ入力器5、表示装置8、スピーカー9及び車載カメラ15などを有して構成されている。制御装置3は、自車走行時に自車が停止することが予測される交差点があるか否かを判断し、自車が停止することが予測される交差点が有ると判断されたときには、当該交差点における右左折車両の大きさ情報を取得し、取得した右左折車両の大きさ情報と当該交差点形態とから当該右左折車両の走行エリアを推測し、推定した走行エリアの境界より手前の位置で走行停止するように案内する。
(もっと読む)
他車検出装置
【課題】簡易な処理によって確実に死角中に位置する他車を検出する「他車検出装置」を提供する。
【解決手段】自車300が現在走行中の車線の右側に隣接する車線が存在する場合において、自車300後方の当該右側に隣接する車線上に他車302が存在し、当該他車302によって当該右側に隣接する車線の右側の境界となるレーンマーク301がカメラ1に対して完全に隠蔽されている場合(b1)には、カメラ1で撮影される自車300後方の画像には、当該右側に隣接する車線の右側の境界となるレーンマーク301が一切写り込まない(b2)。そこで、死角内他車検出部2は、このように当該右側の隣接する車線の右側の境界となるレーンマーク301を認識できない場合、右側のブラインドスポット内の他車の検出を警報制御部3に通知する。
(もっと読む)
車両用表示装置
【課題】覚醒度の低い運転者にも安全な運転支援を行うことができる運転支援装置を提供する。
【解決手段】車両用表示装置1は、危険情報をディスプレイ6に表示する表示処理ECU2を備えており、この表示処理ECU2には、周辺情報検出部3と、車両走行特性センサ4と、ドライバ操作センサ5と、ディスプレイ6に接続された画像生成CPU7と、警報装置8とが接続されている。表示処理ECU2は、周辺情報検出部3から、自車両の周囲に存在する障害物などの周辺情報を取得すると、自車両への予想接近時間に基づいて、各周辺情報の危険度を判定し、危険な周辺情報を危険情報と判断する。そして、周辺情報検出部3から取得した周辺情報に異なる危険度の危険情報が含まれていた場合、表示処理ECU2は、相対的に危険度の低い危険情報の表示を停止する。
(もっと読む)
車両番号行動指示システム、および、車両番号行動指示方法
【課題】入力を簡便化することができ、車両に対応付けられた情報と顧客に対応付けられた情報とを関連付けて管理することができる車両番号行動指示システム、車両番号行動指示方法を提供することを課題とする。
【解決手段】車両番号行動指示装置とPOSシステムとデータセンタとをネットワークを介して通信可能に接続して構成された車両番号行動指示システムであって、車両番号行動指示装置は、車両検出装置を介して読取った車両番号に対応付けて顧客情報をデータセンタに送信し、POSシステムは、カード読取装置を介して読取ったカード番号に対応付けてカード番号マスタ情報をデータセンタに送信し、データセンタは、車両番号とカード番号とを対応付ける変換テーブルを作成して、当該カード番号に対応するカード番号マスタ情報と、当該車両番号に対応付けられた顧客情報と、を統合車両番号マスタ情報として記憶部に格納することを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】先行車の右左折を認識した際の目標車間距離を適正に設定し、運転者の要求に沿った走行制御を実現することができるようにする。
【解決手段】自車両1に搭載された、ステレオカメラ3aを備える前方認識装置3で認識した先行車情報に基づいて、少なくとも追従目標車間距離L1を設定し(S6)、次いで先行車1’の右左折を判定し(S7)、先行車1’の右左折を検出した場合、追従目標車間距離L1に補正係数KG(例えばKG=0.5)を乗算して、右左折時の追従目標車間距離L1を設定する(S8)。
(もっと読む)
車両用警報装置
【課題】 ドライバに対して複数の警報を発することが可能な車両用警報装置に関し、同時に複数の警報が出力されるような状況において、警報の優先順位を適切に設定してドライバの混乱を未然に防止する。
【解決手段】複数の警報を報知可能な警報手段2,4と、ドライバの状態、又は車両の周囲の環境状態、又は車両の状態に基づいて該警報手段を作動させてドライバに警報を与える複数の警報付与手段22,24,26,28,11と、警報付与手段22,24,26,28,11に対して、リスクの度合い又は警報の優先度を示す第1の指標RLPと、上記の各状態におけるリスクの緊急性又は時間的な余裕度を示す第2の指標RMPとを用いて総合指標TRPを算出し、当該総合指標TRPに基づいて警報の優先順位を決定する優先度設定手段8とを有するように構成する。
(もっと読む)
車載システム
【課題】任意の路面標示を適正に検出する「車載システム」を提供する。
【解決手段】画像補正部2は、カメラ1がフレーム周期で逐次撮影した各画像に歪み補正や視点変換を施して、車両100の後方直後の路面領域を上方の視点から観察した場合に得られる画像を補正画像220として生成する。画像合成部3は、画像補正部2によって以上のようにしてフレーム周期で逐次生成される補正画像220から、同じ垂直方向座標範囲内の画像部分を抽出して合成し、車両100が走行してきた路面全体を上方の視点から観察した場合に得られる画像を路面画像300として生成する。路面標示画像抽出部4は、画像合成部3が生成した路面画像300から、路面標示が写り込んでいる部分を路面標示画像430として抽出する。
(もっと読む)
1,961 - 1,980 / 5,473
[ Back to top ]