
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
1,981 - 2,000 / 5,473
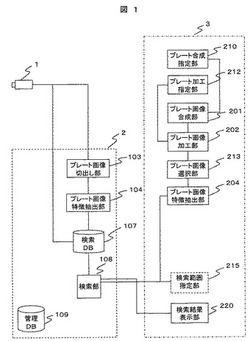
画像検索システム
【課題】
ナンバプレートの画像特徴量を用いた画像検索において、操作者が用意に検索のキーとなる画像を取得できる。
【解決手段】
ナンバプレートを含む画角で車両を撮影するカメラと、画像からナンバプレートを切出すプレート画像切出し部と、ナンバプレートの画像から画像特徴量を抽出するプレート画像特徴抽出部と、少なくともナンバプレートの画像と画像特徴量とを組にして蓄積する検索データベースと、検索データベース中から操作者が指定した画像と画像特徴量の類似度が高い画像を検索する検索部と、操作者から検索対象の車番情報を受け取るプレート合成指定部と、プレート合成指定部の受け取った合成条件に応じたナンバプレートの画像を合成するプレート画像合成部と、合成したプレート画像を一覧表示して操作者の選択を受け取るプレート選択部と、検索結果を表示する検索結果表示部を備えることを最も主な特徴とする。
(もっと読む)
通行監視システム、撮像装置、情報処理装置、通行監視方法、及び通行監視プログラム

【課題】 四輪車、二輪車双方を対象とした通行監視において、1台の撮像装置で、車両の前面及び後面を撮影し、運転者の顔画像、及びナンバープレート情報を取得する。
【解決手段】 移動体を撮影して、移動体の通行を監視する通行監視システムであって、移動経路における移動体を撮影する撮像装置10を有し、撮像装置10が、撮像部と、移動体からの光を前記撮像部へ反射する反射部を備え、移動経路における移動体の前面と後面を、1台の撮像装置10で撮影する通行監視システムとする。
(もっと読む)
車両用警報装置
【課題】 ドライバに対して複数の警報を発することが可能な車両用警報装置に関し、同時に複数の警報が出力されるような状況において、警報の優先順位を適切に設定してドライバの混乱を未然に防止する。
【解決手段】複数の警報を報知可能な警報手段2,4と、車両前方の先行車又は障害物を捕捉し、対象物との距離又は衝突予測時間に基づいて警報手段2,4から警報を発したり、車両1の作動状態を制御する衝突防止装置30と、ドライバの状態又は車両の状態に基づいて警報手段2,4から警報を発生する装置20,11と、警報手段2,4に対して警報の優先順位を設定する優先度設定手段8とをそなえ、優先度設定手段8は、衝突防止装置30で捕捉された対象物に対して、衝突防止装置の警報や作動を実行するべき対象物として信頼できる度合いを求め、当該度合いに基づいて優先順位を設定するように構成する。
(もっと読む)
情報表示装置
【課題】ドライバが視線の大きな移動を要せずに所定の情報を知ることができ、かつヘッドライト等の周囲の光が存在する場合であっても、所定の情報をより確実に知る。
【解決手段】ライト駆動装置175は、危険であると推定された人物500の方向及び人物500までの距離が、光の路面700上の照射部分中の一部分の明度が低下された明度低下部分によって表示されるように、ライト110の配光制御装置を制御する。
(もっと読む)
走行可能領域生成装置
【課題】 離散的条件が付された場合であっても、走行軌跡を生成する際の最適化手法を行う際に好適に用いられる走行可能領域を生成することができる生成装置を提供する。
【解決手段】 走行可能領域演算部13は、障害物位置計測部12から出力された自車両情報およびセーフティコーン位置情報に基づいて、自車両の走行軌跡を描くことができる範囲を規定する走行可能領域を算出する。このとき、同心で形状が比例関係にある大小二つの楕円弧と平行でない二つの直線部とによって囲まれた楕円扇形を含む区間および平行な二つの直線部を含む平行辺含有形状の区間を設定し、前記楕円扇形の直線部と前記平行辺含有形状における平行な二辺のうちの一辺とを繋ぎ合わせて形成した領域に基づいて、走行可能領域を生成する。
(もっと読む)
移動体検出装置、移動体検出方法および移動体検出プログラム
【課題】移動体の画像上の大きさに関わらず(移動体が遠方に存在する場合でも)、移動体を正確に検出すること。
【解決手段】移動体検出装置100は、オプティカルフロー方式により画像内の移動体を検出するオプティカルフロー移動体検出部130と、フレーム間差分法により画像内の移動体を検出するフレーム間差分移動体検出部140とを有し、自車両が停止状態に応じて、オプティカルフロー移動体検出部130あるいはフレーム間差分移動体検出部140による検出結果を出力する。
(もっと読む)
位置推定装置及び位置推定システム
【課題】GPS位置情報の誤差を低減して自車両の絶対位置を高精度に推定する。
【解決手段】位置推定装置は、自車両のGPS位置情報を検出するGPSセンサ11と、自車両と同一車線を走行する1つ以上の他車両でそれぞれ検出されたGPS位置情報を受信する受信部12と、GPSセンサ11により検出された自車両のGPS位置情報と、受信部12により受信された他車両のGPS位置情報と、に基づいて、自車両の走行方向に対して横方向の絶対位置を推定する車両横位置推定部17と、を備えている。
(もっと読む)
対象領域決定方法及び対象領域決定装置
【目的】車下陰やエッジのような特徴を用いなくても画像から対象の関心領域を決定することが可能な「対象領域決定方法及び対象領域決定装置」を提供することである。
【構成】本発明は、画像から対象物(車両)の有無や対象物の識別をするための関心領域を決定する方法及び装置であり、(1)撮像画像における角点(輝度変化の大きな点)を検出するステップと、(2)検出された角点に基づき、撮像画像から対象物体のエッジを取得するステップと、(3)取得されたエッジ上の角点に基づき、関心領域に含まれる角点を寄せ集めるステップと、(4)撮像画像における寄せ集められた角点で形成された画像領域を、対象物体を含む可能性がある関心領域として決定するステップとを含む。
(もっと読む)
走行支援装置
【課題】自車両の運転者に、自車両の周囲の物体に関する情報をより有効に提供する。
【解決手段】情報表示器12は、カメラ、レーダ等自律センサ2が検出した物体の中で、ドライバ視線検出カメラ1により検出された運転者の視線が向けられた物体、及びドライバ視線検出カメラ1により検出された運転者の視線が情報表示器12より提供される当該物体に関する情報の表示位置に向けられた物体については、当該物体に関する情報の提供を一定時間だけ規制するとともに、一定時間経過後は当該物体に関する情報の提供の規制を解除する。これにより、運転者が一度注意を払った物体については情報の提供を一定時間規制することで運転者への煩わしさを軽減し、一定時間経過後は当該物体への注意を再度促すため、時間の経過に伴い運転者の注意が薄れることを防止でき、自車両の周囲の物体に関する情報をより有効に提供できる。
(もっと読む)
警告装置、警告方法および警告プログラム
【課題】画像から検出した移動体および自車両の運転状況に応じて、適切なタイミングで運転手に注意喚起すること。
【解決手段】警告装置100は、車両に搭載したカメラにより撮影された画像に基づいて、移動体検出部120が移動体を検出した場合に、出力部150が一様に警告音を出力するのではなく、警告判定部140が自車両の運転状況情報(アクセルフラグ、ブレーキフラグ、車速フラグ)に応じて警告音の種類(第1の警告音あるいは第2の警告音)を判定し、判定結果に応じて出力部150が警告音を出力する。
(もっと読む)
車両存否判定装置、車両存否判定方法及びプログラム
【課題】画像式車両検知器において、比較的簡単な演算処理で精度の高い車両検出を実現すること。
【解決手段】画像式車両感知器1の制御装置20では、1)カメラ10による撮影画像と所定のテンプレート画像とのパターンマッチングを行ってマッチング率Rを算出し、所定閾値と比較することによる停止車両の検出と、2)フレーム間差分法を用いた移動車両の検出とを行い、双方の検出結果をもとに車両の存否を判断する。また、移動車両の移動速度Vをもとに、当該移動車両の前方の他の車両が存在しないと推定される領域(車両無し推定領域)を判断し、この車両無し推定領域のマッチング率Rの閾値を、停止車両の検出の際に算出された当該領域のマッチング率Rに応じた値に変更する。
(もっと読む)
車線逸脱警報装置
【課題】
ビデオカメラでの白線検出による簡易で正確な車線逸脱警報装置の提案。
【解決手段】
車両側辺に設置したビデオカメラの撮影画像から、車両側辺接地部と道路上に引かれた白線との道路横断方向距離を計測し、その計測結果の距離が一定値以下である場合には車両が白線に接近しすぎて走行しており車線逸脱の恐れがあるとして、また前記計測結果の距離が一定範囲内であって尚且つ車両走行方向の白線に対する傾きが白線に接近する方向に一定値以上である場合もまた、このまま走行を続けると車線逸脱の恐れがあるとして、各々警報を発する。
(もっと読む)
移動体検出装置、移動体検出方法および移動体検出プログラム
【課題】大きなメモリ容量を使用することなく、遠い位置に存在する移動体を正確に検出すること。
【解決手段】移動体検出装置100は、画像(例えば、BCMによって撮影された画像)を取得した場合に、消失点算出部106が消失点を算出する。そして、移動体検出装置100は、部分領域画像抽出部108が消失点を含む所定の範囲の画像を部分領域画像として部分領域画像記憶部103に記憶し、移動体検出部109が部分領域画像に基づいて移動体の検出を行う。
(もっと読む)
車両走行制御装置
【課題】運転者の希望する車間を許容しつつ、レーンキープ制御のための道路形状の検出精度を向上させることができる車両走行制御装置の提供。
【解決手段】本発明による車両走行制御装置は、車両前方の道路を撮像する撮像手段と、前記撮像手段の撮像画像から画像認識された道路形状に基づいて、車両が車線を維持して走行するように制御するレーンキープ制御手段とを備え、車両前方の先行車との車間に応じて、前記撮像手段の撮像範囲、又は前記撮像手段の撮像画像における画像認識範囲を変更する認識範囲変更手段を備えることを特徴とする。
(もっと読む)
ソーラー電池式移動障害物遠隔感知機
【課題】
従来から山間部やビルの間での視界不良のカーブや交差点で、反対側から来る車などの移動物の早期発見が困難であった。これは電源がないのと、レーダーやセンサの応用がなされていなかった為で、これらを可能とした装置を提供するものである。
【解決手段】
電源にソーラー電池を利用、主柱パイプにレーダー及センサを装着、それに点滅ライトを連結させ、移動する障害物をレーダーとセンサが感知し、自動的に必要な方向のライトを点灯、更に自動的にLED文字板の文字を表示、大型設置工事を必要とする事なく、種類も目的に応じ置床用か壁掛用かを選定して使用でき、設置も容易な構造を特徴とする、ソーラー電池式移動障害物遠隔感知機が完成できた。
(もっと読む)
車両周辺監視装置
【課題】撮像手段の用途を切り替える際に撮像手段の露出制御を適切にすることができる車両周辺監視装置を提供する。
【解決手段】車両に設置され、車両周辺を撮像する車載カメラの撮像範囲に対して設定された測光領域内について測光を行い、その測光結果に基づいて、車載カメラの露出制御を行う車両周辺監視装置において、撮像範囲に対して、相異なる複数の領域A、領域B、及び領域Cを指定する。そして、モニタをオン/オフする表示スイッチを切り替えることで、領域A及び領域B、又は領域Cの何れかを測光領域に設定する。
(もっと読む)
車載機器制御装置
【課題】車載機器制御装置において、乗員の顔を確実に撮像し、その撮像された画像情報に基づいた、車載機器を作動させる。
【解決手段】インナーカメラ1を、ステアリングホイール4の中央部41に設ける。インナーカメラは、ホーンスイッチ装置6に取り囲まれるように、エアバッグ装置5の袋体の中央空間に形成された挿通孔、及びホーンカバー部材の中央に形成された挿通孔に挿通された状態でエアバッグベース部材の凹部の底部に、2つのL字状ブラケットを介してボルトにより固定されている。そして、インナーカメラは、ホーンカバー部材の挿通孔からステアリングホイールの外部に覗いている。
(もっと読む)
車両用安全支援装置
【課題】不要な警報を抑制して適切な安全支援を行なうこと。
【解決手段】障害物を検知する障害物検知手段(10)と、該障害物検知手段により検知された障害物の接近程度に応じて警報出力制御を行なう制御手段(60)と、を備える車両用安全支援装置であって、自車両の現在位置を特定する現在位置特定手段(70)を備え、前記制御手段は、前記障害物検知手段の検知結果及び前記現在位置特定手段により特定された自車両の現在位置の履歴に基づいて、同一位置で所定回数以上、前記障害物検知手段により所定時間未満の間、障害物が検知されたと判断した場合に、当該位置を警報抑制位置として所定の記憶手段(62)に記憶させ、自車両が前記所定の記憶手段に記憶された警報抑制位置を通過する際に、前記警報出力制御を抑制することを特徴とする、車両用安全支援装置。
(もっと読む)
ネイチャーナビゲーションシステム
【課題】自然公園の訪問者からの情報をうまく吸い上げることで、管理者側の管理負担を軽減しつつ、管理している観察ポイント情報を常に最新の内容に更新していく。
【解決手段】サーバ装置10は、任意の携帯端末装置30から撮像手段で撮影された画像情報が送信されてきた場合には、携帯端末装置30からの位置情報を合わせて受信し、受信した画像情報を管理領域W内に存在する他の全ての携帯端末装置30に名前の質問メッセージ付きで送信する一方、質問メッセージに対していずれかの携帯端末装置30から名前の回答メッセージが送信されてきた場合には、その回答メッセージを、画像を送信してきた携帯端末装置30を含む全ての携帯端末装置30に送信する。
(もっと読む)
居眠り防止装置
【構成】 居眠り防止装置10は、車両12の運転室14に適用され、運転室14内の運転者18の前方に第1カメラ22、空気砲24および空気砲24と一体の第2カメラ26,27が設けられる。第1カメラ22からの顔画像信号を処理することによって、コンピュータが運転者の居眠り状態を検出すると、コンピュータは、空気砲24(のソレノイド)を駆動する。したがって、空気砲24から運転者の顔面をめがけて空気のかたまりが吐出される。この空気のかたまりによる刺激で運転者が覚醒する。そして、空気のかたまりに覚醒香料の匂い粒子を含ませれば、一層の覚醒効果が期待できる。
【効果】 運転の邪魔にならず、運転者だけを確実に覚醒させることができ、同乗者に不必要な覚醒に対する負担をかけることがない。
(もっと読む)
1,981 - 2,000 / 5,473
[ Back to top ]