
Fターム[5H180CC04]の内容
Fターム[5H180CC04]の下位に属するFターム
色信号を利用するもの (77)
Fターム[5H180CC04]に分類される特許
1,921 - 1,940 / 5,473
ナビゲーション装置および情報提供方法
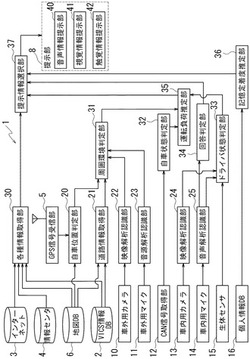
【課題】利用者にとって煩わしさを低減した情報の提供を行うことができるナビゲーション装置および情報提供方法を提供する。
【解決手段】車両の走行地点にかかる情報提供を受けた過去の履歴と情報提供を受けてからの経過時間等から記憶定着度推定部36が記憶定着度を推定し、提示情報選択部37ではさらに提示部8を用いてドライバに質問を行い自由発話形式で回答させたり、選択肢数が2〜3択の質問を行って回答させることによりドライバがすでに知っている情報を高精度に推定して、記憶の定着度が高くドライバにとってすでに知っていると考えられる事柄については、提示する情報の量を少なくして、情報提示の際にドライバが煩わしいと感じることを低減する。
(もっと読む)
駐車支援装置及び駐車支援方法

【課題】駐車時に、1度の後退で駐車可能な駐車の後退開始位置を容易に掴むことのできる形態で運転者に提示する。
【解決手段】自車両の前方における走行可能領域の当該自車両の進行方向に対する幅を検出する車線幅検出回路12と、自車両位置を検出する自車位置検出回路11と、駐車目標領域を検出する駐車枠検出回路13とを備え、自車両が所定の駐車目標領域に到達することが可能となる領域である後退開始領域を算出する駐車可能領域算出回路14と、後退開始領域に含まれる位置ごとに、自車両が後退走行を開始してから終了するまでに許容される自車両姿勢の自由度を判定する車両姿勢自由度判定回路15と、後退開始領域に含まれる位置の自車両姿勢の自由度に応じて運転者に提示する情報の強調度を決定する強調度決定回路16と、後退開始領域を、強調度で表現した情報として運転者に提示する表示装置17とを備える。
(もっと読む)
運転支援装置
【課題】運転者の視点の高さに応じて、適切なタイミングで運転支援動作を行うことのできる運転支援装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物とが衝突する危険があると判断した場合、衝突を回避するための運転支援動作を行う運転支援装置である。運転支援装置は、搭載された車両を運転する運転者の顔の特徴点の高さに応じて、運転支援動作を開始するタイミングを変更する。すなわち、運転者の視点が低くて視界が悪い場合などには、運転支援装置はより早いタイミングで運転支援動作を開始することができる。
(もっと読む)
車両情報記録システム
【課題】 ドライブレコーダとセキュリティ装置とを連携させ、省電力化を図りつつ、車両における盗難行為などの異常状態に関する情報を記録することができる車両情報記録システムを提供する。
【解決手段】 車両が動作状態であるとき、画像および音声情報を取得して、取得した情報を車両に加わる衝撃に応じて記録するドライブレコーダ2と、異常を検出するセンサからの信号に基づいて車両の異常の有無を検出し、異常を検出したときに警報を発する盗難防止装置3とを備え、盗難防止装置3は、車両が停止状態であるときに車両の異常を検出すると、停止状態となっているドライブレコーダ2を起動させ、ドライブレコーダ2は、車両が動作状態から停止状態に移行すると、情報の取得を停止する停止状態となり、停止状態で盗難防止装置3によって起動されると、画像および音声情報を取得して、取得した情報を記録する。
(もっと読む)
車載用ナビゲーション装置
【課題】車速パルスを用いずとも正確な車速を算出することによってGPS信号の受信が不可能な地点における自車位置を高精度に算出することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】車速(GPS受信不能期間の直前におけるGPS信号に基づいて算出された第1の車速a)と、映像速度(GPS受信不能期間の開始時における車載カメラの撮影映像に基づいて算出された映像速度b)との相関関係(速度比K)が、GPS受信不能期間においても維持されるとみなした上で、速度比KにGPS受信不能期間内における映像速度b’を乗じることによって、擬似的な第1の車速として第2の車速a’を算出し、この第2の車速a’を自律航法に用いる。
(もっと読む)
車両用情報表示装置及び情報表示方法
【課題】 運転者の感覚に合致した形態で且つ意味に一貫性のある情報を表示し、運転者の情報に対する違和感や混乱を低減することができる車両用情報表示装置を提供する。
【解決手段】 車両用情報表示装置は、自車両周囲に存在する物体までの距離と、自車両が走行する走行車線における位置と、自車両が走行する走行環境とに基づいて、自車両が走行している運転場面が、予め定められた複数の運転場面のうちのいずれかであることを運転場面決定部14によって決定し、決定した運転場面に応じて、自車両周囲に存在する物体までの距離又は自車両が走行する走行車線における位置のいずれかを、運転者に提示する提示情報の内容として提示情報決定部15によって決定し、決定した提示情報を、視覚情報提示部16を介して運転者に視覚的に提示する。
(もっと読む)
路側境界面検出装置
【課題】簡易な構成で道路と路側の境界面を検出することができる路側境界面検出装置を提供する。
【解決手段】路側境界面検出装置は、車両の前方、後方の一方、あるいはその両方を撮像する撮像手段と、前記撮像手段による撮像によって得られた画像から当該画像内に含まれる物体の形状を示す特徴点を検出する特徴点検出手段と、前記特徴点検出手段により検出された特徴点の分布状態に基づいて、前記車両が走行する道路と路側の境界面を特定する境界面特定手段とから構成される。
(もっと読む)
ナビゲーション装置およびナビゲーション装置用のプログラム
【課題】車両が交通事故に遭った場合に、ドライバに適切な行動を促すことのできるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、自車両が交通事故に遭ったことに基づいて(ステップ115)、自車両が移動可能である場合に(ステップ125)、安全な場所への経路を示し(ステップ135)、自車両が移動可能でない場合に(ステップ125)、自車両の周囲に注意を喚起させるよう、ドライバに指示を与える(ステップ130)。
(もっと読む)
ナンバープレート認識装置、ナンバープレート認識方法、ナンバープレート認識プログラム
【課題】特定のカメラにおいて撮像条件が低下してしまっても認識精度の低下を低減することができるナンバープレート認識装置を提供する。
【解決手段】進入する車両のナンバープレートを撮像する複数のカメラと、前記複数のカメラのそれぞれのカメラによって撮像された撮像結果からナンバープレートの文字列をカメラ毎に認識する第1の文字列認識部と、前記第1の文字列認識部によって得られた認識結果に基づき、前記複数のカメラのうち異なるカメラの撮像結果から得られる複数の認識結果を参照し、これら複数の認識結果から得られる文字列を補完して認識結果として出力する第2の文字列認識部とを有する。
(もっと読む)
車外監視装置
【課題】先行車の離脱判定を実際の走行環境に即して精度良く行う。
【解決手段】先行車の横方向速度の絶対値が予め設定する値よりも小さい場合、先行車の横方向速度と白線・ガードレールの向きが同一方向の場合、先行車の横方向速度の向きと逆側の白線と先行車の間隔が縮小傾向の場合、先行車と先行車以外の立体物群の横方向速度の向きが同一方向の場合の何れかの条件が成立する場合は先行車が離脱し難い状態と判定する。また上述の離脱し難い状態ではなく、先行車が交差点付近に存在する場合、先行車の横方向速度と白線・ガードレールの向きが逆方向の場合、先行車の横方向速度の向きと逆側の白線と先行車の間隔が拡大傾向の場合、先行車がガードレールに埋もれて出力された場合、先行車と先行車以外の立体物群の横方向速度の向きが逆方向の場合の何れかの条件が成立する場合は離脱し易い状態と判定し、それ以外は通常状態と判定する。
(もっと読む)
車線認識装置、車線認識方法および車線認識プログラム
【課題】原画像と鳥瞰画像のそれぞれで発生しやすいノイズを抑制し、車線の認識精度を向上する車線認識装置を提供する。
【解決手段】車線認識装置10は、複数の異なる時刻における原画像を基に合成鳥瞰画像を生成する合成鳥瞰画像作成手段130と、原画像から車線区画線候補を検出する区画線候補検出手段120と、合成鳥瞰画像において車線区画線候補が区画線として適しているか否かを検定する区画線候補検定手段140とを有する。別の車線認識装置11は、原画像から鳥瞰画像を作成する鳥瞰画像作成手段1020と、複数の異なる時刻における原画像を基に合成鳥瞰画像を生成する合成鳥瞰画像作成手段1030と、鳥瞰画像と合成鳥瞰画像とを基に第2合成鳥瞰画像を作成する第2合成鳥瞰画像作成手段1040と、第2合成鳥瞰画像から車線区画線の候補となる線の位置を検出する区画線候補検出手段1050とを有する。
(もっと読む)
車両の接触回避支援装置
【課題】交差点あるいは右折レーンにおいて接触回避支援動作が過剰とならないようにした車両の接触回避支援装置を提供する。
【解決手段】対向車が検出されるとき(S14)、自車と対向車の進路を予測し(S16)、予測された進路が重なる場合(S18)、対向車を障害物と認識して自車との接触の可能性を判定し(S20からS34)、対向車との接触の可能性があると判定される場合、対向車との接触回避を支援する接触回避支援動作を実行する(S36)車両の接触回避支援装置において、自車が交差点あるいはその近傍を走行しているか否か判定し(S22)、肯定されるとき、接触回避支援動作の実行を抑制、即ち、接触回避支援作動距離を小さく設定することで接触回避支援動作の実行を抑制する(S24からS30)。
(もっと読む)
車両の接触回避支援装置
【課題】法令上左側通行が義務付けられない環境を走行するような所定の走行状態においても対向車との接触の可能性を的確に判定して接触回避を支援するようにした車両の接触回避支援装置を提供する。
【解決手段】対向車が検出されるとき(S14)、自車と対向車の進路を予測し(S16)、予測された進路が重なる場合(S18)、対向車を障害物と認識し(S20)、自車が左または右に回避することを前提とする判定条件に従って自車との接触の可能性を判定し(S24,S28からS32)、対向車との接触の可能性があると判定される場合、対向車との接触回避を支援する(S34)車両の接触回避支援装置において、自車が駐車場などの道路以外の場所を走行するなどの所定の走行状態にあるか否か判定し(S22)、肯定されるとき、自車が左または右に回避することを前提とする判定条件に従って自車との接触の可能性を判定する(S26からS32)。
(もっと読む)
車載ナビゲーション装置
【課題】より見やすい画像表示を行なうことが可能な車載ナビゲーション装置を提供すること。
【解決手段】車外設備(100)から車線毎の交通情報を受信する通信手段(50)と、自車両の走行している車線を認識する走行車線認識手段(10、15、32、40)と、前記受信手段により受信された交通情報のうち、前記走行車線認識手段により認識された自車両の走行している車線についての情報を選択し、該選択した情報が表示されるように表示手段を制御する制御手段(60)と、を備える車載ナビゲーション装置(1)。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、自車両の車速を検出する車速検出手段3aと、自車両と先行車両との車間距離及び先行車両の有無を検出する車間距離検出手段3bと、車速を設定車速に制御する及び車間距離を車速で除して算出された車間時間を設定車間時間に制御する車両制御手段3dと、前方情報を取得する前方情報取得手段5aと、前方情報に基づいて自車両を車線内に維持するように操舵装置の転舵力を制御する操舵制御手段5bと、運転者の先行車両に対する追従意思を推定する推定手段3cを備え、車両制御手段3dによる制御と操舵制御手段5bによる制御が同時に行われており、かつ、推定手段3cが追従意思を推定しない場合に、車両制御手段3dが車速を転舵力が制限値となる制限車速以下Vrとする制限車速制御を行うことを特徴とする。
(もっと読む)
閉眼検出装置
【課題】車両を運転するドライバの上瞼と下瞼との間の正確な距離を算出することにより、閉眼状態を正確に検出することができる閉眼検出装置を提供する。
【解決手段】車両を運転するドライバが閉眼状態であることを検出する閉眼検出装置であって、ドライバの顔を撮像する顔撮像部と、顔撮像部で撮像した顔画像から瞼画像を認識する瞼画像認識部と、瞼画像認識部が認識した瞼画像の傾きに対して垂直方向の上瞼画像と下瞼画像との間の距離を算出する瞼間距離算出部と、瞼間距離算出部が算出した距離が所定距離以下であるときに、閉眼状態であることを検出する閉眼状態検出部とを備える。
(もっと読む)
車両の運転支援装置
【課題】 簡単な構成の映像によって、運転支援を可能にする。
【解決手段】 (a)に示すように、車両1が後進して駐車位置40に駐車する際の支援として、後方の映像に重ねて、進行予測曲線5aとともに、車幅を平行に延長したガイドライン5bを表示する。ガイドライン5bによって、車両の向きを確認することができる。(b)に示すように、後方映像に重ねて、進行予測曲線5aのみ表示したり、(c)に示すように、後方映像のみ表示するように、切換えることもできる。運転者が見やすい表示状態を選択すれば、選択状態を記憶し、次回の駐車アシスト動作での切換状態に反映させることができる。
(もっと読む)
車載機器、機能設定方法、機能設定プログラム、および記録媒体
【課題】煩雑な操作入力を要することなく、車載機器にて機能の設定をおこなうこと。
【解決手段】外部の情報管理サーバとの間で情報の送受信が可能な車載機器100は、認証部110と、送信部130と、受信部140と、設定情報記憶部150と、機能設定部121とを備える。認証部110は、起動時にユーザを認証する。送信部130は、認証部110による認証結果の情報を情報管理サーバに送信する。受信部140は、認証結果に対応するユーザ設定情報を情報管理サーバから受信する。設定情報記憶部150は、ユーザ設定情報を記憶する。機能設定部121は、ユーザ設定情報に基づいて、ユーザごとに異なる設定が可能な各種機能の設定をおこなう。
(もっと読む)
車両の走行制御装置
【課題】自車両が自車両前方の該障害物を追い越す際、該障害物との過度の接近や接触を確実に抑制し、走行時における安全性を向上させることができる技術を提供する。
【解決手段】障害物検知部1aと、危険領域設定部1dと、侵入検知部1fと、警報制御部1hとを備えている車両の走行制御装置である。障害物検知部1aは自車両前方の障害物を検知する。危険領域設定部1dは、障害物検知部1aにより検知された障害物の自車両側の側方の領域であって所定の幅を有する接触危険領域を設定する。侵入検知部1fは自車両が接触危険領域内に侵入したことを検知する。警報制御部1hは、侵入検知部1fにより接触危険領域内への自車両の侵入が検知されたときに警報装置21を作動させる。
(もっと読む)
コンテナ車両危険度検査装置
【課題】通路に設置されたカメラによりコンテナ車両を撮影した画像から、コンテナ車両が走行する際の危険度を検査する、コンテナ車両危険度検査装置を提供することである。
【解決手段】コンテナ挙動データ作成部32がコンテナ画像解析部31で解析されたデータであるコンテナの傾き角度の時系列データを作り、コンテナ挙動データとしてまとめ、コンテナ挙動データベース36が様々な状態のコンテナ挙動データを予め保管しており、コンテナ挙動照合部33がコンテナ挙動データ作成部32によりまとめられたコンテナ挙動データとコンテナ挙動データベース36に保管されているコンテナ挙動データとの照合を行い、どのコンテナ挙動データと類似しているかを調べ、走行危険度判断部34がコンテナ挙動照合部33よる照合結果からコンテナ車両の状態を推測し、そのコンテナ車両の走行時の危険度を判断する。
(もっと読む)
1,921 - 1,940 / 5,473
[ Back to top ]