
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
181 - 186 / 186
個体の1つまたは複数の関節運動に基づく1つまたは複数の信号を使用して、固体の位置変化と決定する方法及び装置
1つの例で装置は、個体の1つまたは複数の関節移動に基づいて1つまたは複数の信号を生成する1つまたは複数のセンサと、個体の位置の変化を決定するために1つまたは複数の信号のうちの1つまたは複数を使用する1つまたは複数の処理装置とを含む。 (もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
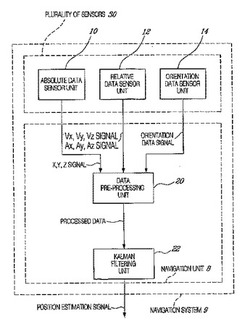
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
慣性システム用の入力された位置合わせデータを使用する慣性GPSナビゲーションシステム
慣性(「INS」)/GPS受信機は、それが、始動中に動いているときには、入力された位置合わせデータを使用してINSサブシステムの位置合わせを決定する。位置合わせデータは、パラメータ化された表面情報、測定されたGPS速度、及び、受信機が搭載されている乗物と、慣性測定ユニット(「IMU」)の加速度計及びジャイロスコープに関連する慣性測定基準、または、ボディ、フレームとの間の既知のまたは既定の角度関係から決定される。制約をもたらすパラメータ化された表面情報は、受信機を収容している乗物が移動している表面の配向とすることができる。受信機は、初期のGPS位置を使用して、パラメータ化された表面上、したがって、既知の表面の配向上の乗物の位置を決定する。受信機は、次に、関連するGPS速度ベクトルを使用して、表面上の乗物のロール、ピッチ、及び方位を決定する。その後、受信機は、乗物の計算されたロール、ピッチ、方位、及び、乗物とIMUボディフレームとの間の既知のまたは既定の角度関係を使用して、IMUボディフレームを受信機によって使用される計算上のフレームまたは基準フレームに関連付ける回転行列を決定する。 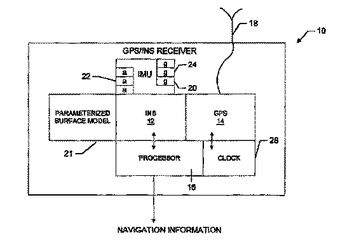 (もっと読む)
(もっと読む)
車載カメラの光軸ずれ検出装置

【課題】走行中の振動や周囲温度の変化などによって車載カメラの撮影光軸がずれた場合、そのずれ量を自動的に検出し、この検出に基づいて運転支援システムを動作させることができる車載カメラの光軸ずれ検出装置を提供すること。
【解決手段】フロントガラスなどに設けたマ−ク指標と、カメラ11の撮影画像からマ−ク指標の画像位置を選び、この画像位置情報をフレ−ムメモリに保存するカメラ制御部12と、フレ−ムメモリから読み出した基準となる画像位置情報と、新たに撮影されたマ−ク指標の画像位置情報を比較し、これら画像位置情報の差が所定の範囲内のときはフレ−ムメモリを新たな画像位置情報に更新し、所定の範囲外となるときは警告ブザ−などを起動させ、運転支援システム機能を停止させる車輌制御部14を備えた構成となっている。
(もっと読む)
視認状況測定装置
【課題】 透過率計を用いずに撮像手段を用いて視認状況を測定し、しかも、昼夜に渡って視認状況を適切に測定する。
【解決手段】 テレビカメラ1は、大気を挟んで所定距離だけ離れた位置に設置された指標2を撮像する。指標2は、色度の異なる2つの領域A,Bを有する。処理装置3は、テレビカメラ1からの画像信号に基づいて、前記所定距離だけ離れた位置の指標2の2つの領域A,Bの色度同士の相違の度合いを求める。また、処理装置3は、この求めた度合いと、大気の混濁の影響を実質的に受けない状態における指標2の2つの領域A,Bの色度同士の相違の度合いとの比から、視程を求める。
(もっと読む)
181 - 186 / 186
[ Back to top ]