
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
21 - 40 / 186
地物情報収集装置及び地物情報収集方法
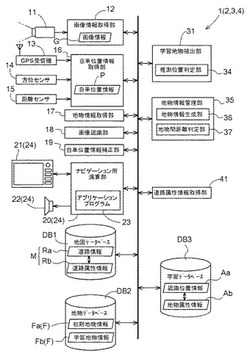
【課題】低コストで高精度な地物情報を収集することが可能な地物情報収集装置及び地物情報収集方法を提供する。
【解決手段】自車両の現在位置を表す自車位置情報Pを取得する自車位置情報取得手段16と、自車両の周辺の画像情報Gを取得する画像情報取得手段12と、画像情報Gに含まれる認識対象の画像認識処理を行う画像認識手段18と、自車位置情報Pに基づいて、画像認識手段18による認識対象の認識結果を表す認識情報を、当該認識対象の認識位置の情報Aaと関連付けて記憶する認識結果記憶手段DB3と、同じ場所の画像情報が複数回画像認識されることにより認識結果記憶手段DB3に記憶された、同じ場所に関する複数の認識情報に基づいて、繰り返し画像認識することが可能な認識対象を学習地物として抽出し、学習地物の位置情報Aaと共に出力する学習地物抽出手段31と、を備える。
(もっと読む)
位置特定装置、位置特定方法および位置特定プログラム

【課題】車両位置を高精度に算出することを目的とする。
【解決手段】擬似距離測位部210は擬似距離測位により測位位置Aを得る。白線データ取得部221は測位位置Aの周辺に位置する各白線の三次元座標データを取得する。白線データ撮像面投影部222は各白線データをカメラ撮像面に投影する。映像白線抽出部223はカメラ映像から白線を抽出する。特徴量投影部224は各撮像面白線データと映像白線データとの特徴量を算出し、特徴量相関係数算出部225は各撮像面白線データを映像白線データと比較し、相関係数判定部226は映像白線データに対応する撮像面白線データを特定する。車両位置算出部227は、カメラ映像における当該白線の二次元位置に当該白線データが示す三次元座標を当てはめ、焦点距離や画角や設置角などのカメラの特性に基づいて、車両位置を算出する。
(もっと読む)
車載ナビゲーション装置、ナビゲーションシステム及びコンピュータプログラム
【課題】GPSを利用して車輌の位置を測位する場合に、電波を直接受信可能なGPS衛星の数が少ない場合にも、高精度で測位を行なえるようにする。
【解決手段】GPS衛星からの直接波による測位結果に基づいて、GPS衛星からの反射波の経路長Ld1+Ld2を直線距離Lに補正する補正量をデータベース化しておく。直接波を受信可能なGPS衛星の数が必要な数に満たない場合に、他のGPS衛星からの反射波をデータベースに基づいて補正することにより、直接波と補正された反射波とによって測位を行なう。
(もっと読む)
車載電子装置、車両用通信システム
【課題】他車両の位置を正確に求めることができる車載電子装置を提供する。
【解決手段】他車両から送信される他車両情報を取得し(ステップS100)、取得した他車両情報に含まれる他車位置情報を、その他車両情報に含まれる他車位置の検出時刻情報および他車速度情報に基づいて補正する(ステップS140)。さらに、他車両から予測情報が送信された場合は、その他車両の予測情報を取得し(ステップS120)、取得した予測情報に基づいて、他車両の運動状態の変化を予測する(ステップS130)。この予測結果に基づいて他車位置情報を補正する。
(もっと読む)
位置検出装置および位置検出方法
【目的】本発明は精度の高い位置検出を可能にする「位置検出装置および位置検出方法」を提供することである。
【構成】自律航法部12は、自律航法用センサーの水平面に対するピッチ角θ、ヨー角Yおよび車両に対するセンサー取り付けピッチ角A、センサー取り付けヨー角A2並びに車速センサーより求まる移動距離を用いて車両位置を計算すると共に、加速度信号を用いて車両速度を計算する。第1の補正部21は車速センサーの出力信号を用いて第1の周期で車両速度を計算し、該車両速度と自律航法部で計算した車両速度との速度差に基づいてピッチ角θ、センサー取り付けピッチ角A、センサー取り付けヨー角A2を補正する。また、第2の補正部22は、GPSレシーバが出力する車両位置、車両速度および自律航法部が出力する車両位置、車両速度を用いて、第1の周期より長い第2の周期(GPS周期)でピッチ角θ、センサー取り付けピッチ角A、ヨー角Y、センサー取り付けヨー角A2を補正する。
(もっと読む)
測位システム、自律測位装置及びマーカ管理装置
【課題】測位対象から最も近くに設置されている測位対象検知器の位置を示す情報を受信して、確実かつ正確に測位対象の位置を補正することができるようにする。
【解決手段】自律測位装置2が測位対象1の位置を測位すると、測位対象1の位置を示す位置情報をマーカ管理装置7に送信し、マーカ管理装置7が自律測位装置2から送信された位置情報を参照して、屋内環境下に設置されている複数のRFIDリーダ4の中で、測位対象1から最も近くに設置されているRFIDリーダ4を特定し、そのRFIDリーダ4の検知感度を高める。
(もっと読む)
駐車位置探索支援装置
【課題】無線通信回線網の電波状態が不良の地域に車両が駐車された場合でも、駐車位置の探索を支援することができる駐車位置探索支援装置を提供すること。
【解決手段】駐車開始が検出された場合、カメラ2によって車両周辺を撮像する。そして、この撮像画像を近距離無線通信方式の無線通信装置3によって、車両ユーザーの携帯電話に送信する。近距離無線通信方式で画像を送信することから、無線通信回線網の電波状態が不良である地域においても、車両ユーザーの携帯電話は画像を受信することができる。したがって、車両ユーザーは、無線通信回線網の電波状態が不良である地域に駐車した場合にも、駐車した車両の周辺の画像を携帯電話に表示させて、その画像を参考に駐車位置を探索することができる。
(もっと読む)
温度ドリフト補正装置及びその方法
【課題】熱赤外線カメラの温度ドリフト補正処理が、該熱赤外線カメラの撮像を利用した目的対象の検出機能に支障が生じないタイミングで行われるように制御する。
【解決手段】車両検出処理装置10の補正制御部11は、外部から信号状態情報を入力し、その情報を基に車両検出対象路線の信号が赤色であるか判断すると共に、内部時計12から時刻情報を入力し、熱赤外線カメラ20の温度ドリフト調整周期(温度ドリフト補正周期)になったか判断する。補正制御部11は、温度ドリフト補正周期になった場合、車両検出対象路線の信号が赤色のときにのみ、熱赤外線カメラ20に補正制御信号を出力する。熱赤外線カメラ20は、その補正制御信号が入力されると、温度ドリフト補正処理を行う。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、および、自動車
【課題】非接触慣性航法装置を用いた際に、経路状態に応じて精度の高いナビゲーションを実現できるようにすることを課題とする。
【解決手段】3次元座標DB22は、道路形状に応じて自動車の移動に加速を伴うと予測される座標位置に対してあらかじめ属性を付与した3次元座標データを記憶する。ロケーションコンピュータ21は、現在位置、移動距離、および、進行方向に関する情報を算出する処理において、ナビゲーションセンサ6においてあらかじめ設定された閾値以上の加速度を検出した場合、属性を参照して、加速度の変化をキャンセルして移動距離を補正して、3次元マップマッチングを実行する。
(もっと読む)
移動体位置検出方法および移動体位置検出装置
【課題】リアルタイムで精度良く移動体の現在位置および方位角を検出することの可能な移動体位置検出方法を提供する。
【解決手段】一のGPSデータを始点として導出された時刻taにおける移動体の位置(xg(ta),yg(ta))および方位角(orig(ta))と、その次のGPSデータから得られた時刻taにおける移動体の位置(xg’(ta),yg’(ta))および方位角(orig’(ta)) とを含む予想誤差(ΔDx,ΔDy,ΔDori)に、その予想誤差(ΔDx,ΔDy,ΔDori)の確率密度関数(Px,Py,Pori)を含む補償係数(Kx,Ky,Kori)を乗算することにより導出される補償量(Cx,Cy,Cori)を用いて、時刻ta以降の移動体の位置(xg(ti),yg(ti))および方位角(orig(ti))を特定する。
(もっと読む)
燃料残量表示システム
【課題】車両の走行状態や路面の傾斜による液面変動の影響を考慮して、正確な燃料残量を知ることが可能な燃料残量表示システムを提供する。
【解決手段】車両の燃料タンク内の燃料残量の検出状態が、安定状態であるか不安定状態であるかを判定し、検出状態が安定状態であると判定された場合に、予め定められた第一算出アルゴリズムにより現在燃料残量値を算出する一方、検出状態が不安定状態であると判定された場合には、当該不安定状態にて第一算出アルゴリズムを適用した場合に予想される算出誤差が縮小するように設計された第二算出アルゴリズムにより現在燃料残量値を算出することを特徴とする燃料残量表示システムとして提供可能である。
(もっと読む)
高度変化により自車位置を特定するナビゲーション装置およびその方法
【課題】 精度の高い高度変化の情報を取得し、取得した高度変化の情報をもとに自車が走行している道路を特定し、自車位置を正確に表示する。
【解決手段】
本発明のナビゲーション装置は、大気圧センサを用いて気圧を検知し、大気圧センサからの出力電圧と所定の基準電圧とを比較することで、電圧の変化を検知する。電圧の変化を元に高度変化をもとに勾配を判定し、自車位置候補が存在する地点の地図データにある道路の勾配と比較し、合致する勾配を持つ自車位置候補の信頼度を修正する。
(もっと読む)
車両用現在位置特定装置
【課題】撮像手段の消耗や電力消費の増大を抑制しつつ、自車両の現在位置を適切に補正することが可能な車両用現在位置特定装置を提供すること。
【解決手段】自車両の現在位置を特定する現在位置特定手段(11、20、30)と、自車両周辺の補正基準物を撮像可能な撮像手段(50)と、補正基準物の位置を含む地図情報を記憶した地図情報記憶手段(40)と、現在位置特定手段により特定された自車両の現在位置を用いて地図情報を検索することにより自車両前方の所定領域内に補正基準物が存在するか否かを判定する検索判定手段(12)と、検索判定部により所定領域内に補正基準物が存在すると判定された場合に、撮像手段を作動させ、撮像手段により撮像された補正基準物に基づき現在位置特定手段により特定された自車両の現在位置を補正する現在位置補正手段(13)と、を備える車両用現在位置特定装置(1)。
(もっと読む)
移動体位置測位装置
【課題】複数の測位手段を用いて効率的に且つ精度良く移動体位置を測位すること。
【解決手段】本発明による移動体位置測位装置は、衛星からの信号の観測データに基づいて瞬時測位方法により移動体の位置を測位する第1測位手段と、過去の移動体の位置の測位結果と、移動体の速度情報とを用いて、移動体の位置を測位する第2測位手段と、過去の前記第1又は第2測位手段の測位結果から得られる変数解を用いて、移動体の位置を測位する第3測位手段と、前記各測位手段のうち測位処理を実行する測位手段を選択する制御手段60とを備え、前記制御手段は、選択した測位手段の測位結果の信頼性が所定基準値より低い場合に、別の測位手段を選択して測位処理を実行させることを特徴とする。
(もっと読む)
旅行時間予測装置、旅行時間予測方法、交通情報提供システム及びプログラム
【課題】現況と統計情報を組み合わせて、精度よく旅行時間の中期予測を行うことのできる旅行時間予測装置の提供。
【解決手段】旅行時間予測装置は、日種別に各リンクの過去の時系列データを統計処理した旅行時間推移パターンを保持する旅行時間推移パターンDB104から、指定されたリンク及び日種別に対応する旅行時間推移パターンを受け取り、該旅行時間推移パターンと前記逐次入力される旅行時間リアルタイムデータ101との誤差が小さくなる旅行時間推移パターンの変換パラメータを算出し、該算出した変換パラメータによって前記旅行時間推移パターンを変換して得られる予測関数を用いて予測する。また、算出された予測値及び変換パラメータは、交通情報として配信される。
(もっと読む)
ナビゲーション装置、車両用安全支援システム、車両位置誤差推定システム
【課題】車両の走行状況に応じて変化する自車位置の誤差量を正確に推定する。
【解決手段】マップマッチ処理部106は、慣性航法処理部102およびGPS処理部103による自車位置の算出結果と、地図データ読出処理部105によりHDD13から読み出された地図データとに基づいて、マップマッチング処理により自車位置を特定する。誤差推定部108は、自車両の走行に応じて所定の割合で誤差量の推定値を増加させ、自車両が特定の地点を通過したときに誤差量の推定値を減少させることにより、自車位置の誤差量を推定する。誤差情報出力部109は、誤差推定部108により推定された自車位置の誤差量に基づいて、自車位置の誤差情報を安全支援装置2へ出力する。
(もっと読む)
移動体位置検出装置
【課題】走行経路の地図データが十分に高分解能であることを利用して、移動体)の走行経路)に対する位置関係を高分解能で検出できる移動体位置検出装置の実現。
【解決手段】移動体1に設けられ、移動経路10の端11,12を検出する移動端検出部2と、移動体の移動速度を検出する速度検出部3と、移動体の移動方向を検出する方位検出部4と、地図データを記憶した地図データ記憶部7と、検出した移動経路の端、移動速度及び移動方向、及び地図データから、移動体1の移動経路に対する位置関係を算出する処理部5と、を備える。
(もっと読む)
移動体位置測位装置
【課題】停車判定を適切に行い、停車状態に起因した移動体位置情報の変動を適切に防止すること。
【解決手段】本発明による移動体位置測位装置は、衛星航法と慣性航法とを併用して移動体位置情報を導出する移動体位置情報導出手段と、加速度センサ及び/又は角速度センサの出力値に基づいて移動体が停止しているか否かを判定する第1移動体停止判定手段と、車速を表すことができる車載センサの出力値等に基づいて移動体が停止しているか否かを判定する第2移動体停止判定手段と、前記第1移動体停止判定手段により移動体が停止していると判定されたとき、そのときの前記移動体位置情報を記憶する記憶手段と、前記第1移動体停止判定手段により移動体が停止していると判定された後に前記第2移動体停止判定手段により移動体が停止していると判定された場合に、前記記憶手段に記憶された移動体位置情報を、現在の移動体位置情報として出力する。
(もっと読む)
車両認識装置
【課題】普通車などに取り付けられた標準プレート、および標準プレート以外のプレート(特殊プレート)を高い認識率で認識することのできる車両認識装置を提供する。
【解決手段】車両のナンバプレートを照射する光源2と、前記車両および車両のナンバプレートを撮影するカメラ1−A,1−Bと、前記カメラで撮影した画像からナンバプレートの候補を検出するプレート検出部6と、検出したナンバプレートの候補の画像から文字情報を認識するプレート認識部12と、前記カメラで撮影した画像からナンバプレートの文字情報以外の車両の特徴を抽出する車両特徴抽出部14を備えた。
(もっと読む)
車両用ナビゲーション装置
【課題】案内方向を示す矢印と渋滞情報とを同時に表示でき、かつ視認性を向上できる車両用ナビゲーション装置を提供する。
【解決手段】強調矢印18の画像が、交通情報の取得対象となる2以上の道路区間にまたがる形で表示される場合に、強調矢印18に含まれる各道路区間の交通状態を、取得された交通情報に基づいて特定し、それら道路区間に対応する強調矢印18の各画像区間領域を、交通状態毎に定められた固有の表示形態にて、道路区間別の交通状態が互いに識別可能となるように表示する。
(もっと読む)
21 - 40 / 186
[ Back to top ]