
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
81 - 100 / 186
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
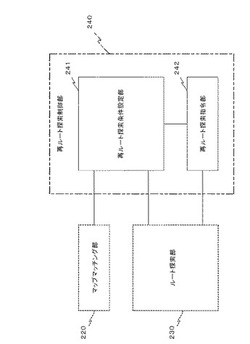
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部230により探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置がマップマッチングにより得られた場合、再ルート探索制御部240が、推奨ルート上に車両が存在しないことが確実であると判断できるか否かを判定する。この判定の結果が肯定的であったときには、再ルート探索制御部240が、直ちに、再ルート探索指令をルート探索部230へ送る。この再ルート探索指令を受けたルート探索部230は、再ルート探索を行う。
(もっと読む)
ナビゲーション・システム内での反復拡張カルマン・フィルタを実施する方法及び装置

【課題】慣性測定装置、位置決め装置及び処理装置(70)を備える車両用のナビゲーション・システム(10)を提供する。
【解決手段】慣性測定装置は、車両の運転に関する第1のセットのデータを提供するように構成され、位置決め装置は、車両の運転に関する第2のセットのデータを提供するように構成れる。処理装置は、慣性測定装置及び位置決め装置が提供するデータのセットを受信するように構成され、処理装置は誤差処理装置を備える。誤差処理装置は、処理装置が受信したデータのセットに関係する時間更新誤差状態及び測定更新誤差状態を用いてプログラムされるものであり、第1の基準に基づいて時間更新誤差状態及び測定更新誤差状態の双方を繰り返し、第2の基準に基づいて測定更新誤差状態のみを繰り返すように構成される。
(もっと読む)
ルート探索装置、その方法、そのプログラム及びその記録媒体
【課題】
合理的なタイミングで再ルート探索を行う。
【解決手段】
ルート探索部220による探索された推奨ルートが設定されているときに、推奨ルート上に存在しない新たなマップマッチング位置が得られると、再ルート探索条件設定部231が、センサデータ処理部210から報告された移動状況情報を検出するセンサの検出結果精度に基づいて、マップマッチング位置の精度が低いと評価できるか否かを判定する。この判定の結果が否定的であった場合には、再ルート探索条件設定部231は、通常の再ルート探索条件である第1再ルート探索条件を設定する。一方、当該判定の結果が肯定的であった場合には、再ルート探索条件設定部231は、第1再ルート探索条件よりも条件満足までに時間がかかる第2再ルート探索条件を設定する。設定された再ルート探索条件が満足されると、再ルート探索が行われる。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】静止時における出力位置の精度を向上させることができる測位装置等を提供すること。
【解決手段】衛星信号S1等に基づいて、測位装置20の測位位置を算出する測位位置算出手段と、測位装置20の移動速度を算出する速度算出手段と、前回測位時からの経過時間が予め規定した許容時間範囲内であり、かつ、前回測位時の移動速度v0が予め規定した第1速度許容範囲内であり、かつ、現在の移動速度v1が予め規定した第2速度許容範囲内であるという静止状態条件βを満たすか否かを判断する静止状態判断手段と、前回測位時の測位位置P0と現在の測位位置P1とを平均化処理して平均位置Q1を算出する平均位置算出手段等を有する。
(もっと読む)
車両情報システム
【課題】 車載システム(105)及び集中サーバーシステム(120)を含む車両情報システムを提供する。
【解決手段】 車載システムはセルラー電話システムのような無線通信リンク(110)を用いてサーバーシステムと通信する。一組のGPS衛星(140)のような測位システムは、車載システムにより使用され測位信号を送信するが、この測位信号は、オプションとして、推定位置の精度向上のため集中サーバーシステムにも利用される。システムの1つのバージョンでは、運転者は車載システムに対して目的地を指定し、この車載システムがその目的地を確認する。車載システムは、目的地の明細を集中サーバーのサーバーシステム(125)へ送信する。サーバーシステムは、目的地までのルートを計算し、計算により求めたルートを車載システムへ送信する。車載システムは、ルートに沿って運転者を誘導する。車載システムは、車両が設定ルートから外れたことを検知すると、車載地図データベースを用いて目的地までの新しいルートを再設定する。
(もっと読む)
位置算出装置の進行角決定方法
【課題】 信頼度の高い方位データを用いて、移動体の進行角を決定することができる「位置検出装置の進行角決定方法」を提供する。
【解決手段】 本発明の進行角決定方法は、GPS衛星により測位されたGPS方位および自立航法センサにより測位された航法方位を入力するステップと、入力されたGPS方位の信頼度と航法測位の信頼度を比較し、信頼度が高いと判定された方位データに基づき進行角を算出するステップとを有する。これにより、進行角の誤差が軽減され、位置精度が向上する。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことが可能な自車位置判定装置を提供する。
【解決手段】自車位置計算部14は、自車が駐車場の建物内に存在するか否かを判定するとともに、自車が建物内に存在すると判定された後に、自車が建物の屋上に存在するか否かを判定する屋内・屋上判定部28と、自車が駐車場を脱出したか否かを判定する駐車場判定部30と、自車が建物の屋上に存在すると判定された場合に、駐車場判定部30により自車が駐車場を脱出したと判定されないように判定制御を行う判定制御部32とを有する。
(もっと読む)
車両間情報通信システム
【課題】地物に対してナビゲーション情報或は走行制御情報の生成を実行しようとする車両間情報通信システムにおいて、自車が検出することができる限界を超えて、正確且つ適切な情報を生成することができる車両間情報通信システムを得る。
【解決手段】送信車両Coが、走行路に沿って存在する地物Xを認識する地物認識手段を備えるとともに、認識された認識地物Xに関連の情報である地物関連情報を受信車両に送信可能に構成され、送信車両Coと受信車両Ciとの車両位置関係を検出する位置関係検出手段を設け、受信車両Ciで、送られてくる地物関連情報及び車両位置関係に基づいて、受信車両からみた認識地物Xを対象とするナビゲーション情報若しくは走行制御情報を生成する。
(もっと読む)
自位置認識システム
【課題】他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成するとともに、受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段10を備え、送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
自車位置判定装置および自車位置判定方法
【課題】地図データベース上に道路が存在しない領域内における周辺道路へのミスマッチングを低減させて自車位置精度を向上させることができ、ひいては、自車を目的地まで適切に案内し、ユーザに安心感を与えて運転の安全性を向上させることができる「自車位置判定装置および自車位置判定方法」を提供すること。
【解決手段】接続されるリンクが存在しないリンク端を自車が通過した旨の判定を行うリンク端通過判定手段27と、リンク端通過判定手段27によって前記リンク端を自車が通過した旨の判定が行われた場合に、自車が道路以外の領域に進入した旨の判定を行う領域進入判定手段34とを備えたこと。
(もっと読む)
自位置認識システム
【課題】走行レーンの認識といった走行路巾方向の自位置認識に関して、精度が高く、信頼性の高い自位置認識を行うことができる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を求める自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度が送信するとともに、受信車両と送信車両との相対位置関係を確認する位置関係検出手段10・11を備え、送信車両の自信度と、受信車両の自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
(もっと読む)
自車位置判定装置
【課題】自車位置の判定を高精度に行うことができ、ひいては、ミスマッチングを防止してナビゲーションの際に自車を目的地まで適切に案内することができる「自車位置判定装置」を提供すること。
【解決手段】自車位置の判定を行う自車位置判定装置14であって、捕捉されたGPS衛星の個数が所定数以下の場合に、前記自車位置の判定として自車が屋内に存在する旨の判定である屋内判定を行う屋内判定手段28を備えたこと。
(もっと読む)
移動体方位決定装置、移動体方位決定方法、ナビゲーション装置、および移動可能端末装置
【課題】 離間した2つの地点を通過することなく、移動体において絶対方位を決定し得る移動体方位決定装置および方法を提供する。また、この技術を適用して、車両等の方位をより正確に表示することのできるナビゲーション装置を提供する。
【解決手段】
移動体101に搭載されたカメラで方位情報マーク102を撮影した画像データが移動体において画像処理される。マークに含まれる3つの切り出しパターンの位置関係から、便宜的にθ0で示されるマークの基準方向と移動体の進行方向とがなす差分角度Δθが算出される。
さらにマークの基準方向に対応する絶対方位θ0を示す符号化パターンをマークの画像からデコードする。このマークの基準方向の絶対方位θ0と、移動体の進行方向に対するマークの基準方向の差分角度Δθとを加算することにより、移動体の進行方位に対応する絶対方位φ=θ0+(−Δθ)を算出する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を迅速に得ることができる補正係数演算装置を得る。
【解決手段】距離補正係数の演算に使用する2つのGPS情報であるGPS情報対に関し、移動距離に基づく評価を実行し、移動距離が大きい情報ほど演算に使用する頻度を高くする。
(もっと読む)
車両位置算出方法及び車載装置
【課題】合流前に高精度な自車位置を算出することができる車両位置算出方法及び車載装置を提供する。
【解決手段】運転支援装置1のバックモニタコンピュータ3は、車両に設けられたカメラ20から画像データを取得する。そして、画像データを用いて、合流エリアに路面標示されたゼブラゾーンを検出する。また、検出したゼブラゾーンの幅を算出し、その幅と、ゼブラゾーン終端までの距離を記憶するテーブルに基づいて、加速車線内での車両の位置を算出する。
(もっと読む)
補正係数演算装置及び自位置認識装置
【課題】逐次取り込まれるGPS情報を十分に生かして、精度が高く信頼性の高い距離補正係数を得ることができる補正係数演算装置を得る。
【解決手段】新たな前記GPS情報を取得する度に、当該取得した現在のGPS情報と、それに対して近い側から順に過去のGPS情報を選択し、選択数が所定数に到達するまで、当該現在のGPS情報に対して更に過去のGPS情報の選択を繰返し、途中に、距離補正係数の演算に不適当と考えられるGPS情報が存在する場合は、学習を終了する。
(もっと読む)
画像認識装置及び方法、並びに自車位置認識装置及び方法
【課題】互いに異なる方向をそれぞれ撮像する複数の撮像手段を備える場合に、状況に応じて最適な撮像手段を一つ選択することができ、演算処理の負荷を低く抑えつつ、地物の認識率及び認識された地物との間の距離認識精度の向上を図る。
【解決手段】自車両に設置され、互いに異なる方向をそれぞれ撮像する複数の撮像手段C1、C2を備え、自車両の周辺に存在する地物の画像認識を行う画像認識装置1であって、自車両の位置情報を取得する自車位置情報取得手段9と、自車位置情報に基づいて、自車位置の周辺の地物情報を所定の地物データベースDB2から取得する地物情報取得手段10と、必要な撮像情報を取得するための選択規則に従い、自車位置情報及び地物情報に基づいて複数の撮像手段C1、C2の一つを選択する選択手段13と、を備える。
(もっと読む)
カーナビゲーション装置
【課題】DVDやCD等のディスクドライブ装置を備えた構成において、ジャイロセンサを削減して、構成を簡単化する。
【解決手段】本発明のカーナビゲーション装置は、地図を表示する機能や、車両の現在位置を検出する機能等を備えたものにおいて、DVDやCD等のディスクをドライブして該ディスクに記録されている情報を読み取る機能を少なくとも有するディスクドライブ装置を備え、前記ディスクに加わるコリオリ力を検出し、この検出信号をジャイロセンサ信号として利用するように構成したところに特徴を有する。
(もっと読む)
ナビゲーション装置および車両位置確定方法
【課題】ランダバウト内でのマップマッチング精度を向上させ、車両位置マークがランダバウトの道路上から外れてしまう不都合を極力防止することが可能な「ナビゲーション装置および車両位置確定方法」を提供する。
【解決手段】車両の回転角度を検出する角度センサ5aの出力信号に基づいて、ランダバウト内を走行中の車両の回転角度変化量θを求め、その回転角度変化量θと同じ角度をランダバウトの中心角∠A’OB’とするような点B’をマッチングポイントとして求める。このように、距離センサ5bにより検出される距離情報は用いず、回転角度変化量θを利用してマップマッチングを行うことにより、距離情報がランダバウト内でのマップマッチングに与える影響を排除して、道路リンクと実際の道路との間に大きさの差があるランダバウト内でもマップマッチングを精度良く行うことができるようにする。
(もっと読む)
車両用運転支援装置
【課題】交差点の右左折時における停止位置からの発進を最適に支援すること。
【解決手段】交差点において右折又は左折を行って、他車両が走行する本線へ合流する為のタイミングを指示する車両用運転支援装置は、他車両の走行情報を取得する走行情報取得手段と、走行情報取得手段により取得された他車両の走行情報に基づいて、他車両の位置を推定する他車両位置推定手段と、本線へ合流後の自車両の位置を推定する自車両位置推定手段と、他車両位置推定手段により推定された他車両の位置と、自車両位置推定手段により推定された自車両の位置と、に基づいて、他車両の走行を阻害しないような、本線へ合流する為のタイミングを指示するタイミング指示手段と、を備えている。
(もっと読む)
81 - 100 / 186
[ Back to top ]