
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
41 - 60 / 186
データ更新システム及び方法並びにナビゲーション装置
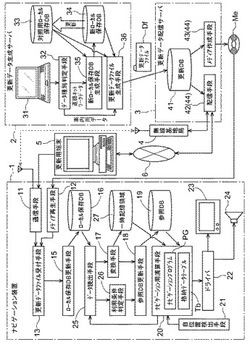
【課題】データ量が多く、各データ同士が複雑に関連しているデータベースの差分更新を容易に行うことを可能としつつ、端末装置が備えるデータベースの全体のデータ量を比較的少なく抑えることが可能なデータ更新システム等を提供する。
【解決手段】所定の動作プログラムPGに従って動作する端末装置1は、動作プログラムPGにより参照される参照用データ形式とは異なる更新用データ形式で構成され、更新データファイルDfにより更新されるローカル保存データベース16と、動作プログラムPGからの要求に従ってローカル保存データベース16の中から必要なデータを読出手段25と、読み出されたローカル保存データベース16のデータを参照用データ形式に変換する手段17と、を備え、サーバ装置2、3は、端末装置1に提供するデータベース更新用の更新データファイルDfを出力する手段44を備える。
(もっと読む)
運転操作支援装置

【課題】前方車両を追い越す場合などの自車両が車線変更を伴う挙動を行う場合に、運転手の運転操作を適切に支援する。
【解決手段】ナビゲーション装置1は、前方車両と自車両との車間距離や後方車両と自車両との車間距離などの自車両の挙動に対して動的に変化する周囲状況を取得し、その取得した周囲状況を反映した表示ガイダンスを表示すると共に音声ガイダンスを出力する。自車両が走行車線から追い越し車線に車線変更する場合や追い越し車線から走行車線から車線変更する場合に、運転手の運転操作を適切に支援することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】再探索後の経路情報をユーザに提示することができるナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】再探索後の経路をユーザに提示すると共に、再探索によって設定された目的地までの案内経路に従って、ナビゲーションするナビゲーション装置であって、少なくともルートの再探索後の経路情報を含む再探索情報を記録するリルート情報記録部と、リルート情報記録部に記録された再探索情報を解析し、再探索後の経路の解析結果を取得するリルート解析部と、リルート解析部が取得した再探索後の経路情報をユーザに提示する提示部とを備える。
(もっと読む)
地上位置を決定するための方法
【課題】ナビゲーションシステムによって決定されるユーザ受信器の地上位置の精度を向上させる方法であって、移動体参照受信器が使用される方法に関する。更に対応する装置に関する。
【解決手段】複数の検知された定置ランドマークによって、移動体参照受信器の補正された地上位置と位置誤差が算定され、複数の位置誤差から平均位置誤差を算定することができる。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラム
【課題】地域特性を考慮した探索アルゴリズムによって設定された目的地までの案内経路に従って、ナビゲーションするナビゲーション装置、ナビゲーション方法、及びナビゲーションプログラムを提供する。
【解決手段】探索アルゴリズムによって設定された案内経路に従って、ナビゲーションするナビゲーション装置であって、複数の地域特性各々に関連づけられた少なくとも1つの探索アルゴリズムを記憶する探索アルゴリズム記憶部と、自車位置を計測する測位部と、測位部が計測した自車位置の周辺の地域特性を取得する地域情報取得部と、探索アルゴリズム記憶部を参照し、地域情報取得部が取得した地域特性に対応する探索アルゴリズムを選出する探索アルゴリズム選出部と、探索アルゴリズム選出部が選出した探索アルゴリズムに基づいて、案内経路を設定する経路探索部とを備える。
(もっと読む)
車載用目標物検出装置
【課題】 記憶させる位置情報を少なくしつつ簡易なアルゴリズムで位置情報に基づいて検出した目標物が現在の走行する道路種別(高速道路/一般道路)と同じ道路上に存在するものか否かを弁別することができる車載用目標物報知装置を提供すること
【解決手段】 自車の位置を検出するGPS受信部10と、目標物の位置を記憶する目標物位置情報記憶部21と、目標物が設置されているのと同じ道路か否かを判定するための事前確認位置を記憶する事前確認位置情報記憶部22と、各記憶部に格納されたそれぞれの位置情報と、位置検出手段の出力から目標物の存在を判定する報知判定部30と、報知判定部の出力から、目標物の存在を報知する報知部40と、を備える。報知判定部は、自車の位置から所定距離内でありかつ車両の進行方向の所定角度範囲内に目標物が存在する場合に目標物が存在するものとする第1の判定条件と、事前確認位置を通過したこととする第2の判定条件と、を満たしたときに目標物が存在するものと判定する。
(もっと読む)
ナビゲーション装置、位置検出方法及び位置検出プログラム
【課題】測位情報を取得できないときであっても、移動体の速度及び現在位置を高精度に算出できるようにする。
【解決手段】自律速度算出ユニット11は、クレードル着脱検出部16からの着脱情報CDを基に、ナビゲーション装置1がクレードル4に装着されている場合、学習した取付傾きを用いて高精度な自律速度Vtを算出することができ、一方ナビゲーション装置1がクレードル4から取り外されたことを認識した場合、学習したセンサ座標系が変化したことを認識して学習結果である加速度センサ14の取付傾きを用いた自律速度Vtの算出を中止するため、誤った自律速度Vtの出力を未然に防止することができ、ナビゲーションユニット12における現在位置の算出精度を低下させずに済む。
(もっと読む)
ナビゲーション装置、停止検出方法及び停止検出プログラム
【課題】本発明は、車両100が停止しているときに、車両100が停止していることを確実に検出することができる。
【解決手段】本発明は、GPS信号に基づく位置信号PSからGPS速度を算出し、当該GPS速度から車両100が停止していると認識した際に、車両100に作用する加速度を表す横方向加速度信号SBを検出すると共に、当該横方向加速度信号SBの分散値を車両100の振動を表す横方向加速度分散値DPとして算出し、この横方向加速度分散値DPの平均値を第1の閾値である停止判定閾値SDとして設定することにより、当該横方向加速度分散値DPに基づいて停止判定閾値SDを設定するようにする。
(もっと読む)
移動体標定プログラム、該プログラムを記録した記録媒体、移動体標定装置、および移動体標定方法
【課題】移動体へのカメラの設置自由度が高く、かつ移動体標定の高精度化を図ること。
【解決手段】仮想カメラVCijの位置Vijと移動体原点Cijとの相対位置関係1)〜3)より、移動体原点Cijが存在する位置候補となる移動体原点軌道を特定する。
1)移動体原点位置Cij−仮想カメラVCij間の距離dが一定
2)移動体座標系(移動体原点Om)からみた仮想カメラVCijの方向が一定(仮想カメラVCijから見たマーカーPjと移動体原点位置Cijとの間の角度が一定)
3)仮想カメラVCijがマーカー円Eij上に存在(仮想カメラVCijから見たマーカーPi,Pj間の角度が一定)
移動体原点軌道Tが複数ある場合に各移動体原点軌道Tの交点を求めることで移動体Mの位置を特定できる。
(もっと読む)
プログラム、測位回路及び電子機器
【課題】マルチパス環境における測位誤差を考慮に入れた、より高精度な測位を実現する
こと。
【解決手段】捕捉したGPS信号に基づいて4つの補正衛星の組合せである衛星組合せが
抽出され、各衛星組合せそれぞれについて、当該衛星組合せを用いた場合の現在位置が計
測される。そして、抽出された衛星組合せのうち、前回最適組合せと判定された衛星組合
せが選定組合せとして選定され、当該選定組合せについての計測結果がマップマッチング
処理部に出力される。そして、抽出された衛星組合せそれぞれの計測結果と、マップマッ
チング処理部から入力されたマップマッチング結果である位置情報とに基づいて、マップ
マッチング結果に最近接する計測結果となった衛星組合せを今回の最適組合せとして判定
する。
(もっと読む)
障害物認識装置
【課題】より誤検出を少なくして障害物を認識できる障害物認識装置を提供する。
【解決手段】走行支援システム1はECU10からなり、ECU10は、ナビゲーションシステム12、前方ミリ波レーダ30等が接続された物体検出部100を備える。道路種別認識部110が、ナビゲーションシステム12の測定結果から自車の走行している道路を自動車専用道路であると認識したときは、レーダ波検出部102は前方ミリ波レーダ30及び近距離ミリ波レーダ32の反射率が通常の第1閾値より高い第2閾値以上のときに物体を障害物として抽出する。そのため、自車200が自動車専用道路を走行しており、歩行者がいる可能性が低い場合には、マンホール等の路面クラッターを障害物であると検出してしまう等の誤検出を少なくして障害物を認識できる。
(もっと読む)
標高検出装置および自車位置判定装置
【課題】自車両が走行している地点の標高を高精度に検出することができ、ひいては、自車位置の判定精度を向上させることができる「標高検出装置および自車位置判定装置」を提供すること。
【解決手段】自車両が地表面上を走行している第1の区間では、標高データの取得によって自車両が走行している地表面上の地点の標高を検出し、自車両が立体構造物上を走行している第2の区間では、垂直方向移動量検出手段9によって検出された第2の区間の直前の地表面からの自車両の垂直方向の移動量を、補正用データを用いて補正し、補正後の垂直方向の移動量を当該直前の地表面の標高に加算することによって、当該立体構造物上の地点の標高を検出すること。
(もっと読む)
測位装置、測位装置の制御方法、その制御プログラム及び記録媒体
【課題】静止時及び微速移動時において、信頼性を有し、かつ、精度の高い位置を出力することができる測位装置等を提供すること。
【解決手段】測位衛星からの信号である衛星信号に基づいて、測位を行う測位装置20であって、参照位置Pを保持する位置保持手段と、測位装置20の移動状態を判断する移動状態判断手段と、移動状態に基づいて、参照位置Pと、測位によって算出した現在の測位位置Pg(n)を平均化して平均位置を算出する平均位置算出手段と、平均位置を出力する位置出力手段と、平均位置を参照位置Pとして位置保持手段に格納する位置格納手段と、を有する。
(もっと読む)
車両用ナビゲーション装置
【課題】マップマッチング処理を行いながら、車両が高速道路のサービスエリアやパーキングエリアに進入したときには、極力早期に車両の位置をエリア側道路上に表示すること。
【解決手段】車両が高速道路を走行中であって、当該高速道路の本線道路と、その本線道路から分岐するサービスエリアまたはパーキングエリアのエリア側道路とが、車両が走行している候補道路となったとき、車両の進行方位と高速道路の本線道路の方位との差が所定値以上となったことを条件として、サービスエリアまたはパーキングエリアのエリア側道路を、車両が走行している道路として決定する。これにより、極力早期に、車両がエリア側道路を走行していると決定することができ、車両をエリア側道路上に正しく表示することが可能になる。
(もっと読む)
タイヤ内圧低下判定装置
【課題】車両のタイヤ内圧低下を判定するに際し、タイヤ速度情報を得るための特殊な配線が不要であり、カーナビゲーションシステムに各機能を集約させたタイヤ内圧低下判定装置を提供する。
【解決手段】走行車両に搭載されたGPS受信機によるGPS情報から車両速度を算出する手段、車両のタイヤ回転センサによるタイヤ回転速度を算出する手段、該車両速度とタイヤ回転速度とを逐次比較することで、車両走行中のタイヤの見かけの動荷重半径を算出する手段、該動荷重半径値とあらかじめ正常内圧時の動荷重半径として記憶された初期値とを比較し、動荷重半径の変化の大きさから、タイヤの内圧低下を判定する手段を含むタイヤ内圧低下判定装置であって、前記GPS受信機として、いわゆるカーナビゲーションシステムに搭載されたGPS受信機を用いることを特徴とするタイヤ内圧低下判定装置である。
(もっと読む)
位置情報利用装置
【課題】POIへの立ち寄りをより正確に認識し、POIへの立ち寄りをトリガとする車両制御を行うための技術を提供する。
【解決手段】POI認識処理部33は、走行軌跡処理部31及びマップマッチング処理部32により算出された現在位置と、ジャイロセンサ23及びステアリングセンサ24からの検出信号とに基づき、自車両がPOIに立ち寄ったか否かを判定する。そして、自車両がPOIへ立ち寄ったと判定した場合、当該判定の精度に関する認識自信度を算出する。そして、車両制御ECU27は、この認識自信度に応じた動作モードで車載機器に対して当該POIに対応する所定の動作を実行させる。
(もっと読む)
移動体位置推定システム、及び、移動体位置推定方法
【課題】 移動体の位置を高い精度で推定可能な移動体位置推定システム及び移動体位置推定方法を提供する。
【解決手段】 移動体位置計測装置から移動体の位置情報を取得すると、当該位置情報を用いて地図データの座標系に分散するパーティクルをサンプリングするパーティクルフィルタを備え、当該パーティクルフィルタによりサンプリングしたパーティクルから当該移動体の位置を推定する移動体位置推定システム及び移動体位置推定方法であり、当該地図データの座標系上の各領域に当該移動体が存在する確率を示す確率データを有し、当該確率データに従って当該地図データの座標系にパーティクルを分散させることにより、移動体の位置を高い精度で推定する。
(もっと読む)
制御用情報記憶装置及びプログラム
【課題】車両制御を実行するタイミングの精度を向上させる。
【解決手段】ナビゲーション装置は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部へ出力する。これにより、車両制御部においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、車両が制御開始点や制御終了点を通過した通過タイミングを車両制御部へ出力することにより、車両制御のタイミングの精度を高めることができる。
(もっと読む)
取り付け方向判定方法、ナビゲーション装置及びプログラム
【課題】ユーザが誤ってナビゲーション装置を反対向きに取り付けた場合でも簡易な処理によりその誤りを判定することが可能な取り付け方向判定方法を提供する。
【解決手段】加速方向取得部13により車両の加速方向を加速度センサ12から取得し、またギア位置取得部18により変速機17から出力されるギア位置を取得する。第1判定部15は取得した加速方向及びギア位置に基づき、装置取り付け方向の正否を判定する。装置取り付け方向が反対であると判断した場合、反対であることを示す情報をディスプレイ110へ表示する。また、取り付け方向が反対であると判断した場合、加速度センサ12から出力される加速度を補正部19にて補正する。
(もっと読む)
障害物検出システム及び障害物検出方法
【課題】NUCを行うタイミングを調整することにより、障害物の検出漏れを未然に防止することができる障害物検出システム及び障害物検出方法を提供する。
【解決手段】車両の周辺を時系列的に撮像する複数の遠赤外線撮像装置で撮像した視差画像を取得して、画像中の障害物の存在を検出する。遠赤外線撮像装置は、マトリックス状に配列された複数の撮像素子ごとに所定の温度に対する出力値を補正するオフセット補正値及び撮像素子ごとの所定の温度変化率に対する出力値の差異を補正するゲイン補正値を記憶する。撮像素子へ入光させる開口を開閉するシャッターの表面を撮像した画像データに基づいて、記憶してある撮像素子ごとのオフセット補正値を更新する。一の遠赤外線撮像装置は、他の遠赤外線撮像装置がオフセット補正値を更新した後、画像データ1フレームに相当する時間以上経過した場合に、オフセット補正値の更新を開始する。
(もっと読む)
41 - 60 / 186
[ Back to top ]