
制御用情報記憶装置及びプログラム

【課題】車両制御を実行するタイミングの精度を向上させる。
【解決手段】ナビゲーション装置は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部へ出力する。これにより、車両制御部においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、車両が制御開始点や制御終了点を通過した通過タイミングを車両制御部へ出力することにより、車両制御のタイミングの精度を高めることができる。
【解決手段】ナビゲーション装置は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部へ出力する。これにより、車両制御部においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、車両が制御開始点や制御終了点を通過した通過タイミングを車両制御部へ出力することにより、車両制御のタイミングの精度を高めることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制御に利用するための制御用情報を記憶する制御用情報記憶装置に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置の地図データを利用して道路状況に応じた車両制御を行うことが考えられている。このような車両制御を精度よく実現するためには、ナビゲーション装置の地図データが正確であることが要求されるが、現状の地図データは車両制御を行うのに十分な正確性を有しているとはいえない。
【0003】
そこで、車両の走行軌跡を車両制御に利用するための制御用情報として保存し、その制御用情報を利用して車両制御を行う技術が提案されている。
例えば特許文献1には、車両に搭載されたセンサにより検出した道路情報を用いて車両制御に用いられる道路情報データベースを作成する際に、平均値の精度を向上させることができるようにした道路情報学習システムが開示されている。このシステムでは、車両走行時に道路に関する道路情報を検出し、道路情報から構成される道路情報データベースを、道路地図情報における位置情報に関連づけて記憶する。そして、道路情報データベースの平均値及び標準偏差を用いて平均値を中心とする道路情報選別用の基準範囲を設定し、道路情報が基準範囲に含まれる場合に、道路情報を道路情報データベースの更新用に採用する。このようにすることで、ばらつきの多いデータを事前に除去し、道路情報データベースの平均値の精度を向上させるようにしている。
【0004】
また、例えば特許文献2には、既に登録されている道路についてデータベースを修正し、地図上の道路の形状と実道路の形状とを一致させることができるようにしたデータベース修正装置が開示されている。このデータベース修正装置では、現在位置及びノードデータに基づいて車両が走行した道路を特定し、特定した道路に関する走行路データと車両の走行軌跡を表す走行軌跡データとに基づいてデータベースを修正する。そして、車両が走行した区間を分割し、分割した区間の走行軌跡データにおける走行軌跡の軌跡始点及び軌跡終点のうちの少なくとも一方が直線区間にあるかどうかを判断して、直線区間にない場合、軌跡始点及び軌跡終点のうちの少なくとも一方を変更する。
【0005】
さらに、例えば特許文献3には、車線を含めた実際の道路形状と、記憶している道路情報による道路の形状とを一致させることができるようにした道路情報の修正装置が開示されている。この修正装置は、記憶している道路情報を、実際の道路を走行した際の車両の走行軌跡情報に基づいて修正するものであり、道路情報が双方向通行可能な道路を一の道路形状として表現可能なものである場合、走行軌跡情報に基づいて道路情報を進行方向ごとに修正する。
【特許文献1】特開2005−091071号公報
【特許文献2】特開2001−141467号公報
【特許文献3】特開2005−121707号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
前述したような従来の構成では、車両の走行軌跡に基づき実際の道路形状に合った車両制御を行うことについては考慮されているものの、車両制御を実行するタイミングの精度については十分検討されていなかった。
【0007】
本発明は、こうした問題にかんがみてなされたものであり、車両制御を実行するタイミングの精度を向上させることを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた本発明の請求項1に記載の制御用情報記憶装置では、情報記憶手段が、車両の現在位置に基づく走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する。そして、制御点検出手段が、車両が交差点から退出した地点を車両制御の制御開始点として検出し、情報記憶手段は、制御点検出手段により検出された制御開始点を制御用情報として記憶する。なお、「交差点」とは、複数の道路が接続された地点全般のことであり、十字路、T字路、分岐点、合流点等が含まれる。
【0009】
このように、本発明の制御用情報記憶装置は、車両制御に利用するための制御用情報として、車両の走行軌跡とともに車両制御の制御開始点を記憶する。したがって、このような制御用情報に基づく車両制御においては、車両の走行軌跡に基づき実際の道路の道路形状に合った車両制御が可能となるだけでなく、制御開始点に基づき車両制御の開始タイミングを高い精度で特定することが可能となる。
【0010】
そして、例えば請求項2に記載のように、情報記憶手段が、制御点検出手段により検出された制御開始点を始点とする走行軌跡を記憶するようにすれば、車両の走行軌跡と車両制御の制御開始点とを効率よく記憶することができる。
【0011】
また、請求項3に記載の制御用情報記憶装置では、情報出力手段が、情報記憶手段により記憶されている制御用情報を外部へ出力する。このような構成によれば、制御用情報記憶装置に記憶されている制御用情報を容易に利用することができる。
【0012】
具体的には、例えば請求項4に記載のように、情報出力手段は、制御用情報を、車両制御を行う車両制御手段へ出力するように構成すれば、制御用情報記憶装置に記憶されている制御用情報に基づく車両制御を車両制御手段に行わせることができる。
【0013】
この場合には、請求項5に記載のように、タイミング通知手段が、情報記憶手段により走行軌跡が記憶されている道路に車両が進入したタイミングとして、制御点検出手段により検出された制御開始点を車両が通過したタイミングを車両制御手段へ通知するとよい。このような構成によれば、制御用情報として出力した走行軌跡に対する車両の現在位置を、制御開始点に基づき高い精度で特定させることができる。この結果、車両制御手段により行われる車両制御のタイミングの精度を高めることができる。
【0014】
また、情報出力手段は、制御用情報をそのまま車両制御手段へ出力してもよいが、例えば請求項6に記載のように、制御用情報を、情報の加工処理を行った上で車両制御手段へ出力すれば、車両制御手段において必要となる情報のみを送信することが可能となる。
【0015】
特に、請求項7に記載のように、情報出力手段が、制御用情報を、複数種類の車両制御手段へ、各車両制御手段に応じた情報の加工処理を行った上で出力するように構成すれば、各車両制御手段において必要となる情報のみを送信することが可能となる。この結果、制御用情報の出力を効率よく行うことができる。なお、複数種類の車両制御手段へ出力する制御用情報の中には、情報の加工処理が行われないものが含まれていてもよい。
【0016】
ところで、制御点検出手段による制御開始点の検出は、具体的には次のような手法で行うことができる。
すなわち、例えば請求項8に記載の制御用情報記憶装置では、制御点検出手段は、車両のステアリング角度の変化が所定の条件を満たした地点を制御開始点として検出する。このような構成によれば、ステアリング角度の変化が安定して得られるほど、制御開始点を高い精度で検出することが可能となる。
【0017】
また、例えば請求項9に記載の制御用情報記憶装置では、地図取得手段が、交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する。そして、制御点検出手段は、車両が走行中の道路に対応するリンクが変化した地点を制御開始点として検出する。このような構成によれば、リンクの変化する地点が安定して得られるほど、制御開始点を高い精度で検出することが可能となる。
【0018】
また、例えば請求項10に記載の制御用情報記憶装置では、特徴物検出手段が、道路に存在する特徴物を検出し、地図取得手段が、交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する。そして、制御点検出手段は、特徴物検出手段により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点として検出する。このような構成によれば、リンクの変化する地点が安定して得られ、かつ、特徴物検出手段による特徴物の検出精度が高いほど、制御開始点を高い精度で検出することが可能となる。なお、「特徴物」とは、道路に存在しかつ車両から検出可能なもののことであり、例えば、道路上に描かれている道路標示(一時停止線や横断歩道等)や、道路上又は道路近傍に配置された設置物(信号機や路側器等)などが含まれる。
【0019】
また、例えば請求項11に記載の制御用情報記憶装置では、特徴物検出手段が、道路に存在する特徴物を検出する。そして、制御点検出手段は、特徴物検出手段により検出された特徴物を車両が通過した地点を制御開始点として検出する。このような構成によれば、特徴物検出手段による特徴物の検出精度が高いほど、制御開始点を高い精度で検出することが可能となる。
【0020】
ここで、特徴物検出手段は、請求項12に記載のように、交差点であることが把握できるものを特徴物として検出するものであることが好ましい。
また、特徴物検出手段は、請求項13に記載のように、車両がその前方に存在する交差点の近傍に到達した時点で、特徴物の検出を開始するとよい。このようにすれば、検出を効率的に行うことができるとともに、誤検出を生じにくくすることができる。
【0021】
特に、請求項14に記載のように、特徴物検出手段が、車両の前方に存在する交差点の種類に応じた特徴物を検出するものであれば、特徴物の検出率を向上させることができる。
【0022】
一方、前述した請求項9,10のようにリンクの変化する地点に基づき制御開始点を検出する構成では、1つの交差点に対して複数のノードが設定されている場合には、制御開始点を正常に検出できないことが考えられる。
【0023】
そこで、請求項15に記載の制御用情報記憶装置では、制御点検出手段が、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つのみをリンクが変化した地点とみなす。このような構成によれば、複数のノードが設定された交差点においても、リンクが変化した地点を1つに特定することができる。この結果、制御開始点を正常に検出することができる。
【0024】
具体的には、例えば請求項16に記載のように、制御点検出手段は、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定することができる。
【0025】
ところで、車両の走行軌跡は、同一の道路であっても進行方向の違いにより異なることが考えられる。そこで、請求項17に記載のように、情報記憶手段が、同一の道路について車両の進行方向別に制御用情報を記憶するとよい。このようにすれば、各進行方向に適した制御用情報を記憶することができる。
【0026】
また、制御用情報としては、走行軌跡以外の情報も利用することができる。すなわち、請求項18に記載の制御用情報記憶装置では、情報記憶手段が、車両の運転者による運転操作を制御用情報として記憶する。このような制御用情報に基づく車両制御においては、車両の運転者による運転操作に基づく車両制御が可能となる。
【0027】
また、請求項19に記載の制御用情報記憶装置では、制御点検出手段が、車両が交差点に進入した地点を車両制御の制御終了点として検出し、情報記憶手段は、制御点検出手段により検出された制御終了点を制御用情報として記憶する。したがって、このような制御用情報に基づく車両制御においては、制御終了点に基づき車両制御の終了タイミングを高い精度で特定することが可能となる。
【0028】
そして、例えば請求項20に記載のように、情報記憶手段が、制御点検出手段により検出された制御終了点を終点とする走行軌跡を記憶するようにすれば、車両の走行軌跡と車両の制御終了点とを効率よく記憶することができる。
【0029】
次に、請求項21に記載のプログラムは、請求項1から請求項20までのいずれか1項に記載の制御用情報記憶装置が備える各手段としてコンピュータを機能させるものである。例えば、請求項1に記載の制御用情報記憶装置が備える各手段としてコンピュータを機能させるプログラムは、次のような構成となる。
【0030】
車両の現在位置を検出する位置検出手段、前記位置検出手段により検出された現在位置に基づく車両の走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する情報記憶手段、及び、車両が交差点から退出した地点を前記車両制御の制御開始点として検出する制御点検出手段、としてコンピュータを機能させるプログラムであって、前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を前記制御用情報として記憶することを特徴とするプログラム。
【0031】
このようなプログラムによれば、コンピュータを用いて前述した制御用情報記憶装置を構築することができ、これにより前述した効果を得ることができる。特に、プログラムはネットワーク等を利用して流通させることも可能である上、プログラムの入れ替えは部品の入れ替えに比較して容易であるため、制御用情報記憶装置の機能向上等を容易に行うことができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明が適用された実施形態について、図面を用いて説明する。
[1.構成の説明]
図1は、実施形態のナビゲーション装置10の概略構成を示すブロック図である。
【0033】
ナビゲーション装置10は、車両に搭載された状態で用いられるものであり、GPSセンサ11と、方位センサ12と、距離センサ13と、地図データベース14と、制御部20とを備えている。
【0034】
GPSセンサ11は、GPS(Global Positioning System)用の人工衛星からの電波をGPSアンテナを介して受信し、当該ナビゲーション装置10が搭載されている車両(以下、単に「車両」という)の絶対位置(緯度、経度及び高度)を検出する。
【0035】
方位センサ12は、地磁気に基づき車両の絶対方位を検出する。
距離センサ13は、車両の走行距離を検出する。
地図データベース14には、地図に関する種々の情報からなる地図データが記憶されている。この地図データにおいて、車両が走行する道路は、実際の道路における各交差点の中央位置に設定されたノードと、ノード間を接続するリンクとにより表されている。すなわち、図2に示すように、地図データに記憶されている道路は、リンク単位に分割して管理されており、各リンクはその端点(ノード)において他のリンクと接続されている。そして、各リンクには固有の識別子であるリンクID(道路識別子)が付与されており、リンクIDを用いてリンクを特定することが可能となっている。ここで、「交差点」とは、複数の道路が接続された地点全般のことであり、十字路、T字路、分岐点、合流点等が含まれる。つまり、3つ以上のリンクが接続される点がノードとなる。
【0036】
なお、地図データベース14は、ハードディスク装置に地図データを記憶するように構成してもよく、また、磁気ディスク、光磁気ディスク、半導体製メモリ等などの可搬型記憶媒体から地図データを読み出す構成とすることも可能である。
【0037】
制御部20は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、各種処理を実行する。例えば、GPSセンサ11、方位センサ12及び距離センサ13からの各検出信号に基づき車両の現在位置(絶対位置)を検出するとともに、地図データベース14に記憶されている地図データから現在位置周辺の地図を読み出して、車両の現在位置を表す自車位置マークとともに図示しない表示部(ディスプレイ)に表示させる現在位置表示処理や、現在位置から目的地までの最適な経路を検索して案内する経路案内処理等を実行する。なお、ROMには、後述する処理(図4〜図7,図13)を実行するためのプログラムが記憶されている。
【0038】
また、制御部20には、車両に搭載された特徴物検出センサ31及び運転操作検出センサ32からの情報が入力される。
特徴物検出センサ31は、交差点に存在する特徴物を検出するためのものである。ここで、特徴物とは、検出することにより交差点であることが把握できるものであり、本実施形態では、特徴物として、道路上に描かれている道路標示(例えば一時停止線や横断歩道)を検出する。また、本実施形態では、特徴物検出センサ31として、車両の後端部における上方位置から下方(真下を含む)を撮影するように配置されたバックカメラが用いられている。
【0039】
運転操作検出センサ32は、車両の運転者により行われる運転操作を表す情報(以下「運転操作情報」という。)を検出するためのものである。本実施形態では、運転操作情報として、ステアリング角度、車両の速度及び加速度を検出する。
【0040】
一方、本実施形態のナビゲーション装置10が搭載される車両には、車両制御を行う複数の車両制御部(車両制御手段)41〜44が搭載されている。具体的には、車両前方の道路形状に応じて燃費を向上させるように駆動力制御を行う低燃費制御部41と、車両前方の道路形状に応じて前照灯の光軸方向を調整する制御を行うライト制御部42と、先行車との距離及び相対速度並びに自車の走行状態に基づき設定される目標加速度が得られるように自車両のエンジン、ギア、ブレーキ等を制御することで先行車との適正車間距離を保持するアダプティブ・クルーズ・コントロールを行うACC制御部43と、車両前方の道路状況に応じて運転操作をサポートする制御を行う先読み制御部44とが搭載されている。
【0041】
そして、本実施形態のナビゲーション装置10は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点から退出したと判定した地点を車両制御の制御開始点として検出し、車両が次の交差点に進入したと判定した地点を車両制御の制御終了点として検出する。本実施形態では、図3に示すように、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡(以下「絶対走行軌跡」という。)を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部41〜44へ出力する。これにより、車両制御部41〜44においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、ナビゲーション装置10から車両制御部41〜44へ、車両が制御開始点や制御終了点を通過した通過タイミングを出力することにより、車両制御のタイミングの精度を高めることができる。
【0042】
[2.処理の説明]
次に、制御部20が実行する処理の具体的内容について説明する。
図1に示すように、制御部20は、自車位置計算部21、走行軌跡メモリ22、マップマッチング処理部23及び安全制御処理部24として機能する。特に、安全制御処理部24は、記憶部24a及び情報加工部24bとしても機能する。なお、これら各機能はそれぞれ独立したハードウェアにより実現することも可能であるが、本実施形態では共通のハードウェアにより実現している。
【0043】
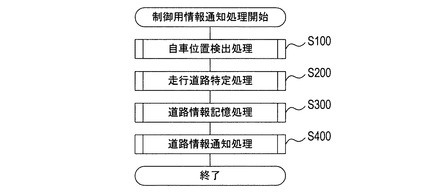
そして、制御部20は、図4のフローチャートに示す制御用情報通知処理を定期的(時間t(例えば100ms)ごと)に実行する。すなわち、この制御用情報通知処理が開始されると、まずS100で、自車位置計算部21が、後述する自車位置検出処理を行う(図5)。続いて、S200では、マップマッチング処理部23が、後述する走行道路特定処理を行う(図6)。続いて、S300では、安全制御処理部24が、後述する道路情報記憶処理を行う(図7)。続いて、S400では、安全制御処理部24が、後述する道路情報通知処理を行う(図13)。その後、制御用情報通知処理を終了する。
【0044】
ここで、S100〜S400の各処理内容について具体的に説明する。
まず、自車位置計算部21が実行する自車位置検出処理(S100)について、図5のフローチャートを用いて説明する。
【0045】
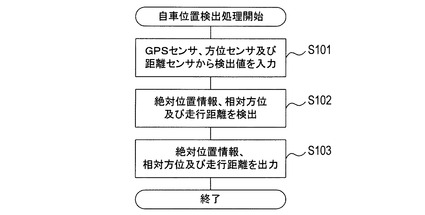
この自車位置検出処理が開始されると、まずS101で、GPSセンサ11、方位センサ12及び距離センサ13から検出値を入力する。
続いて、S102では、S101で入力した検出値に基づき、車両の現在位置(絶対位置)を表す絶対位置情報と、時間tだけ前の状態を基準とした相対方位及び走行距離とを検出する。
【0046】
続いて、S103では、相対方位及び走行距離を走行軌跡メモリ22へ出力し、絶対位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力する。その後、自車位置検出処理を終了する。なお、走行軌跡メモリ22は、自車位置計算部21から相対方位及び走行距離を入力すると、相対的な走行軌跡(以下「相対走行軌跡」という。)を表す走行軌跡データとして記憶(蓄積)する。
【0047】
次に、マップマッチング処理部23が実行する走行道路特定処理(S200)について、図6のフローチャートを用いて説明する。
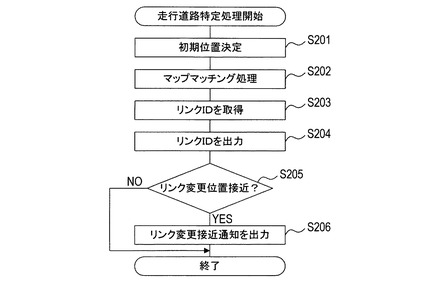
この走行道路特定処理が開始されると、まずS201で、自車位置計算部21から入力した絶対位置情報に基づいて初期位置を決定する。
【0048】
続いて、S202では、地図データベース14に記憶されている地図データの表す地図を基準として車両の現在位置を補正するマップマッチング処理を行う。具体的には、走行軌跡メモリ22に記憶されている走行軌跡データの表す相対走行軌跡と、地図データの表す道路パターンとを比較し、相対走行軌跡と最も相関の高い道路パターンを走行中の道路として判別して(パターンマッチング)、その道路パターンと整合するように車両の現在位置を補正する。
【0049】
続いて、S203では、車両が現在走行中の道路に対応するリンクのリンクIDを地図データから取得する。
続いて、S204では、S203で取得したリンクIDを安全制御処理部24へ出力する。
【0050】
続いて、S205では、車両が前方の道路に存在する交差点の近傍に到達したか否か(具体的には、現在走行中の道路に対応するリンクの終了点に接近したことの判定基準となる地点(例えば残り20mの地点)を通過したか否か)を判定する。なお、この判定処理では、車両が交差点の近傍に到達したことさえ判断できればよく、高い判定精度は必要とされない。
【0051】
そして、S205で、前方の道路に存在する交差点の近傍に到達したと判定した場合には、S206へ移行し、リンク変更接近通知を安全制御処理部24へ出力する。その後、走行道路特定処理を終了する。
【0052】
一方、S205で、前方の道路に存在する交差点の近傍に到達していないと判定した場合には、S206の処理を行わずに走行道路特定処理を終了する。
次に、安全制御処理部24が実行する道路情報記憶処理(S300)について、図7のフローチャートを用いて説明する。
【0053】
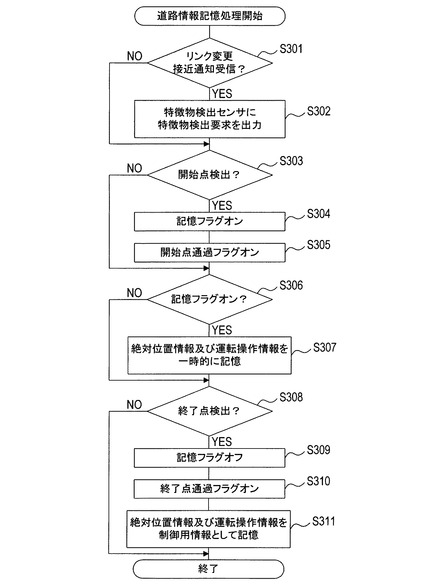
この道路情報記憶処理が開始されると、まずS301で、マップマッチング処理部23からリンク変更接近通知が入力されたか否かを判定する。
そして、S301で、リンク変更接近通知が入力されたと判定した場合には、S302へ移行し、特徴物検出センサ31に対して特徴物検出要求を出力した後、S303へ移行する。すなわち、本実施形態において、特徴物検出センサ31は、ナビゲーション装置10の制御部20から特徴物検出要求を入力した場合にのみ特徴物の検出処理(撮影及び画像解析)を開始する。このようにすることで、車両が交差点近傍に存在している期間にのみ特徴物検出センサ31による検出処理が行われるようにしている。そして、特徴物検出センサ31は、特徴物の検出処理により特徴物(本実施形態では一時停止線及び横断歩道)を検出した場合(換言すれば、車両が特徴物の位置を通過した場合)に、その旨を表す特徴物候補通知をナビゲーション装置10の制御部20へ出力する。したがって、車両が特徴物の位置を通過したタイミングで、特徴物候補通知が入力される。なお、特徴物検出センサ31が特徴物の検出処理を終了するタイミングは、例えば、時間や走行距離に基づき決定してもよく、また、地図上の車両の位置に基づき決定してもよい。
【0054】
一方、S301で、リンク変更接近通知が入力されていないと判定した場合には、S302の処理を行わずにS303へ移行する。
S303では、車両が交差点から退出したか否か(換言すれば、制御開始点が検出されたか否か)を判定する。具体的には、特徴物検出センサ31から横断歩道の検出を表す特徴物候補通知が入力された地点のうち、マップマッチング処理部23から入力したリンクIDが変化した地点に最も近い地点を、制御開始点として検出する。つまり、車両が走行中の道路に対応するリンクが変化した地点に最も近い横断歩道が制御開始点として検出される。
【0055】
そして、S303で、制御開始点が検出されたと判定した場合には、S304へ移行し、絶対走行軌跡等の情報を記憶する状態を表すフラグである記憶フラグをオンする。
続いて、S304では、制御開始点を通過したことを表すフラグである開始点通過フラグをオンする。その後、S306へ移行する。なお、開始点通過フラグは、道路情報記憶処理の開始時にオフにされる。
【0056】
一方、S303で、制御開始点が検出されていないと判定した場合には、S304,S305の処理を行わずにS306へ移行する。
S306では、記憶フラグがオンとなっているか否かを判定する。なお、記憶フラグは、前述したように制御開始点が検出された時点でオンされ、後述するように制御終了点が検出された時点でオフされる。
【0057】
そして、S306で、記憶フラグがオンとなっていると判定した場合には、S307へ移行し、自車位置計算部21から入力した絶対位置情報と、運転操作検出センサ32から入力した運転操作情報とを一時的に記憶する。その後、S308へ移行する。
【0058】
一方、S306で、記憶フラグがオンとなっていないと判定した場合には、S307の処理を行わずにS308へ移行する。
S308では、車両が交差点に進入したか否か(換言すれば、制御終了点が検出されたか否か)を判定する。具体的には、特徴物検出センサ31から一時停止線の検出を表す特徴物候補通知が入力された地点のうち、マップマッチング処理部23から入力したリンクIDが変化した地点に最も近い地点を、制御終了点として検出する。つまり、車両が走行中の道路に対応するリンクが変化した地点に最も近い一時停止線が制御終了点として検出される。
【0059】
そして、S308で、制御終了点が検出されたと判定した場合には、S309へ移行し、記憶フラグをオフする。
続いて、S310では、制御終了点を通過したことを表すフラグである終了点通過フラグをオンする。なお、終了点通過フラグは、道路情報記憶処理の開始時にオフにされる。
【0060】
続いて、S311では、S307で記憶した絶対位置情報及び運転操作情報を、制御用情報として記憶部24aに記憶した後、道路情報記憶処理を終了する。
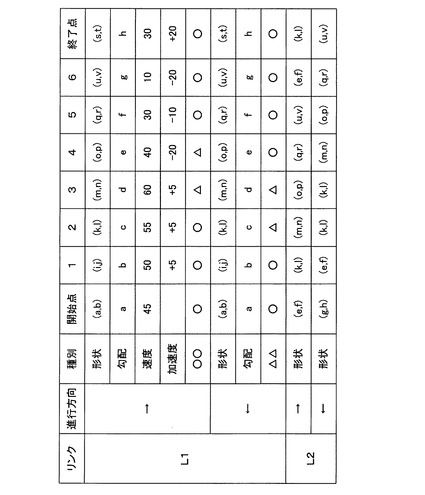
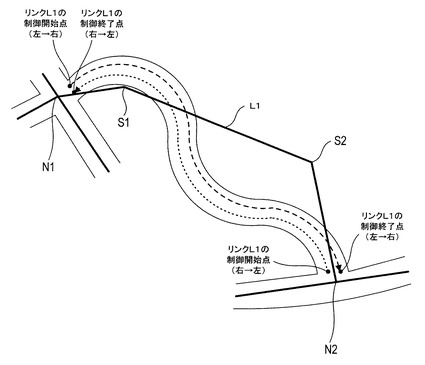
具体的には、制御用情報は、図8に示すように、リンク単位で、かつ、車両の進行方向別に(各リンクにつき2種類)記憶される。すなわち、図9に示すように、同一のリンクL1に対応する道路を走行する場合であっても、その道路を右→左の進行方向で走行する場合(破線)と、左→右の進行方向で走行する場合(点線)とでは、走行する車線が異なることに伴い走行軌跡が異なるものとなる。特に、道路がカーブ形状の場合にはその違いが顕著となる。したがって、同一リンクであっても、進行方向別に制御用情報を記憶するようにしている。なお、図9において、N1,N2はリンクL1の各端部に対応するノードであり、S1,S2はリンクL1の形状を表すための形状点である。
【0061】
ここで、進行方向の判定手法について説明する。本実施形態では、リンクにおける車両の進行方向を、そのリンクへ進入する以前に走行していたリンクに基づき判定する。具体的には、図10に示すように、リンクL1,L2,L3のいずれかからリンクL4に進入した場合には、リンクL4における車両の進行方向は、図面上、左→右であると判定することができる。逆に、リンクL5,L6のいずれかからリンクL4に進入した場合には、リンクL4における車両の進行方向は、図面上、右→左であると判定することができる。なお、進行方向の判定手法はこれに限定されるものではなく、例えば車両の現在位置の変化や車両の方位に基づき判定することも可能である。
【0062】
制御用情報としては、道路形状(緯度及び経度)、道路勾配(高度)、車両の速度及び加速度、ステアリング角度等を記憶する。なお、道路形状及び道路勾配は、絶対位置情報から取得され、車両の速度及び加速度並びにステアリング角度は、運転操作情報から取得される。また、制御用情報は、制御開始点から制御終了点までの区間分のみを記憶する。
【0063】
なお、リンクID及び進行方向が同一の制御用情報が既に記憶されている場合には、既存の情報を消去して新たな情報を記憶したり、既存の情報と新たな情報とを比較して精度が高いと判断される情報を選択したり、情報を平均化するように更新したりすることが考えられる。
【0064】
一方、S308で、制御終了点が検出されていないと判定した場合には、S309〜S311の処理を行わずに道路情報記憶処理を終了する。
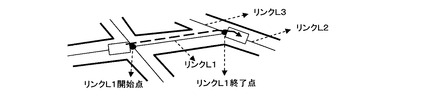
ここで、以上説明した道路情報記憶処理により実現される処理の具体例として、図11に示すように車両がリンクL1からリンクL2へ走行する場合を例に挙げて説明する。
【0065】
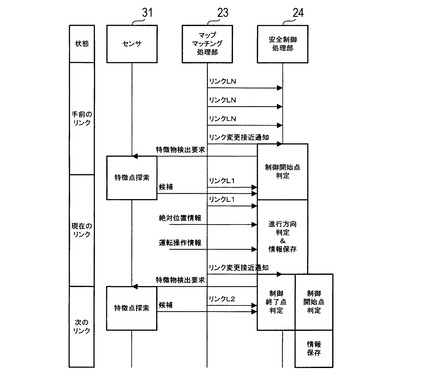
図12に示すように、車両がリンクL1の手前のリンクLNを走行中は、マップマッチング処理部23から安全制御処理部24へリンクLNについてのリンクIDが出力される。そして、車両が交差点(リンクL1の開始点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
【0066】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0067】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクLNからリンクL1に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(交差点)に対応する特徴物の位置を、リンクL1についての制御開始点として判定する。そして、リンクL1についての制御用情報として、自車位置計算部21からの絶対位置情報と、運転操作検出センサ32からの運転操作情報とを記憶する。
【0068】
その後、車両が交差点(リンクL1の終了点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0069】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクL1からリンクL2に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(一時停止線)に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。
【0070】
以上のような処理により、リンクL1についての制御用情報として、制御開始点から制御終了点までの絶対走行軌跡及び運転操作情報が記憶される。
次に、安全制御処理部24が実行する道路情報通知処理(S400)について、図13のフローチャートを用いて説明する。
【0071】
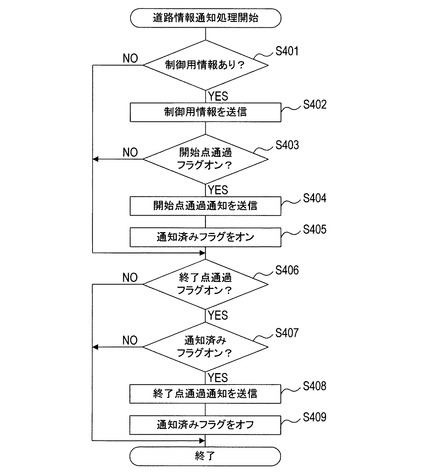
この道路情報通知処理が開始されると、まずS401で、現在走行中の道路に対応するリンクについての制御用情報であって車両の進行方向が一致するものが記憶部24aに記憶されているか否かを判定する。
【0072】
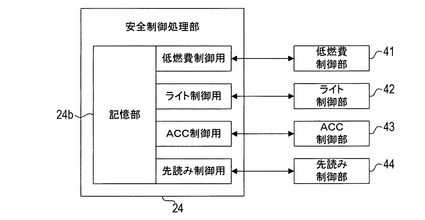
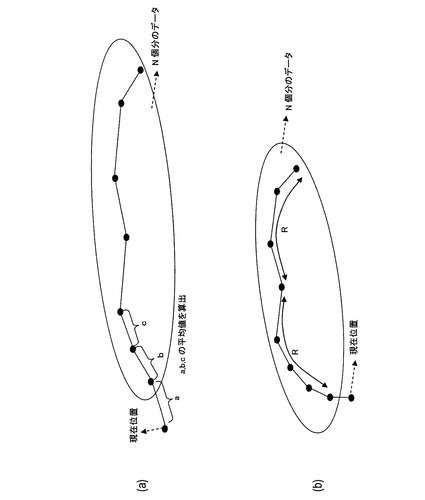
そして、S401で、制御用情報が記憶されていると判定した場合には、S402へ移行し、その制御用情報を記憶部24aから読み出し、各車両制御部41〜44へ出力する。具体的には、図14に示すように、制御用情報を、各車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力する。すなわち、車両制御部41〜44は、それぞれ車両制御の内容が異なるため、必要とする情報も異なる。例えば、低燃費制御部41では、車両前方の道路の平均勾配やコーナーRが必要となる。また例えば、ライト制御部42では、車両前方の道路のコーナーRやカーブ開始点が必要となる。そこで、記憶されている制御用情報を元に、各車両制御部41〜44用の情報を作成した上で各車両制御部41〜44へ出力するようにしている。具体的には、平均勾配は、図15(a)に示すように、現在位置からN個分の勾配データを利用し、一定の間隔分の区間の勾配平均値を計算することにより求める。また、コーナーRは、図15(b)に示すように、現在位置からN個分の形状データを読み込み計算することにより求める。
【0073】
続いて、S403では、開始点通過フラグがオンとなっているか否かを判定する。なお、開始点通過フラグは、前述した道路情報記憶処理(図7)におけるS304でオンされる。
【0074】
このS403で、開始点通過フラグがオンとなっていると判定した場合には、S404へ移行し、開始点通過通知を各車両制御部41〜44へ出力する。これにより、各車両制御部41〜44は、制御開始点を車両が通過したタイミング(換言すれば、制御用情報として出力した絶対走行軌跡に対応する道路に車両が進入したタイミング)を把握することができる。
【0075】
続いて、S405では、開始点通過通知を送信したことを表す通知済みフラグをオンする。その後、S406へ移行する。
一方、S401で制御用情報が記憶されていないと判定した場合や、S403で開始点通過フラグがオンとなっていないと判定した場合には、そのままS406へ移行する。
【0076】
S406では、終了点通過フラグがオンとなっているか否かを判定する。なお、終了点通過フラグは、前述した道路情報記憶処理(図7)におけるS310でオンされる。
このS406で、終了点通過フラグがオンとなっていると判定した場合には、S407へ移行し、通知済みフラグがオンしているか否かを判定する。なお、通知済みフラグは、前述したように開始点通過通知を送信した時点でオンされ、後述するように終了点通過通知を送信した時点でオフされる。
【0077】
そして、S407で、通知済みフラグがオンとなっていると判定した場合には、S408へ移行し、終了点通過通知を各車両制御部41〜44へ出力する。これにより、各車両制御部41〜44は、制御終了点を車両が通過したタイミング(換言すれば、制御用情報として出力した絶対走行軌跡に対応する道路から車両が退出したタイミング)を把握することができる。
【0078】
続いて、S409では、通知済みフラグをオフする。その後、道路情報通知処理を終了する。
一方、S406で終了点通過フラグがオンとなっていないと判定した場合や、S407で通知済みフラグがオンとなっていないと判定した場合には、そのまま道路情報通知処理を終了する。
【0079】
ここで、以上説明した道路情報通知処理により実現される処理の具体例として、図11に示すように車両がリンクL1からリンクL2へ走行する場合を例に挙げて説明する。
図16に示すように、車両がリンクL1の手前のリンクLNを走行中は、マップマッチング処理部23から安全制御処理部24へリンクLNについてのリンクIDが出力される。そして、車両が交差点(リンクL1の開始点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
【0080】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0081】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクLNからリンクL1に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(交差点)に対応する特徴点の位置を、リンクL1についての制御開始点として判定する。そして、開始点通過通知を各車両制御部41〜44へ出力する。
【0082】
また、安全制御処理部24は、リンクL1についての制御用情報を車両制御部41〜44へ出力する。なお、制御用情報は一度に出力してもよく、複数回に分けて出力してもよい。
【0083】
その後、車両が交差点(リンクL1の終了点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0084】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクL1からリンクL2に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(一時停止線)に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。そして、終了点通過通知を各車両制御部41〜44へ出力する。
【0085】
以上のような処理により、リンクL1についての制御用情報、開始点通過通知及び終了点通過通知の出力が行われる。
[3.処理の具体例]
次に、実施形態のナビゲーション装置10により実行される処理について、ライト制御部42に対する制御用情報の出力を例に挙げて、図17のタイムチャートを用いて説明する。
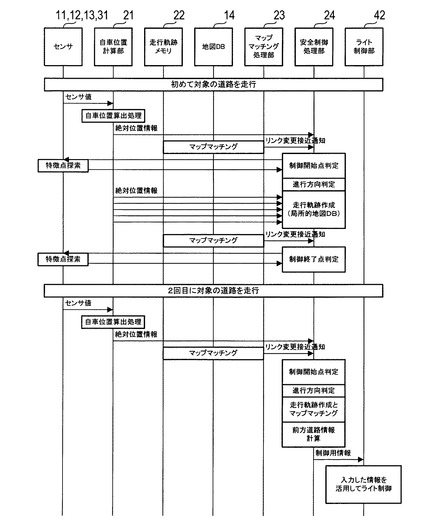
【0086】
まず、車両が対象の道路を初めて走行する場合について説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出値に基づき検出した絶対位置情報を安全制御処理部24へ定期的に出力する。
【0087】
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行う。そして、車両が交差点の近傍に到達すると、リンク変更接近通知を安全制御処理部24へ出力する。
【0088】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0089】
安全制御処理部24は、特徴物候補通知及びリンクIDに基づき、制御開始点を判定する。そして、車両の進行方向を判定するとともに、自車位置計算部21からの絶対位置情報及び運転操作検出センサ32からの運転操作情報を記憶する。その後、マップマッチング処理部23から再びリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0090】
安全制御処理部24は、特徴物候補通知及びリンクIDに基づき、制御終了点を判定する。このようにして判定した制御開始点から制御終了点までの絶対走行軌跡及び運転操作情報を、制御用情報として記憶する。
【0091】
次に、車両が対象の道路を2回目に走行する場合について説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出値に基づき検出した絶対位置情報を安全制御処理部24へ定期的に出力する。
【0092】
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行う。そして、車両が交差点の近傍に到達すると、リンク変更接近通知を安全制御処理部24へ出力する。
【0093】
安全制御処理部24は、前述のように、制御開始点を判定し、車両の進行方向を判定するとともに、自車位置計算部21からの絶対位置情報及び運転操作検出センサ32からの運転操作情報を記憶する。
【0094】
また、安全制御処理部24(情報加工部24b)は、既に記憶されている制御用情報に対し、ライト制御部42用の加工処理を行う。具体的には、前述したコーナーRの算出処理等、前方道路情報の計算を行う。そして、加工処理後の制御用情報をライト制御部42へ出力する。さらに、車両が制御開始点及び制御終了点を通過したタイミングを通知する。
【0095】
ライト制御部42は、安全制御処理部24から入力した制御用情報及び制御開始点及び制御終了点の通過タイミングに従い、車両制御を行う。
このように、道路を2回目以降に走行する際には、制御用情報の記憶処理に加え、既に記憶されている制御用情報をライト制御部42へ出力する処理を行う。このとき、制御開始点及び制御終了点を毎回同一の条件で検出するため、車両制御のタイミングを正確に合わせることができる。
【0096】
[4.効果]
以上説明したように、本実施形態のナビゲーション装置10では、車両が交差点から退出した地点を車両制御の制御開始点として検出するとともに(S303)、車両が次の交差点に進入した地点を車両制御の制御終了点として検出する(S308)。そして、検出した制御開始点を始点とし制御終了点を終点とする絶対走行軌跡を、制御用情報として車両の進行方向別に記憶する(311)。そして、制御用情報が記憶されている道路を走行する際に、各車両制御部41〜44へ、その制御用情報を出力するとともに(S402)、車両が制御開始点及び制御終了点を通過したタイミングを通知する(S404,S408)。
【0097】
したがって、車両制御部41〜44においては、車両の絶対走行軌跡に基づき実際の道路の道路形状に合った車両制御が可能となるだけでなく、制御開始点及び制御終了点に基づき車両制御の開始タイミングを高い精度で特定することが可能となる。
【0098】
特に、本実施形態のナビゲーション装置10では、制御用情報を、車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力するようにしている。このため、記憶している制御用情報の中から各車両制御部41〜44において必要となる情報のみを送信することが可能となり、制御用情報の出力を効率よく行うことができる。
【0099】
また、本実施形態のナビゲーション装置10では、特徴物検出センサ31により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出する。このような構成によれば、例えば、交差点の横断歩道とは別の横断歩道が交差点の近傍に存在するような場合にも、交差点の横断歩道を高い精度で検出することができる。
【0100】
特に、本実施形態では、車両の後端部における上方位置から下方を撮影するように配置されたバックカメラを特徴物検出センサ31として用いているため、横断歩道や一時停止線等を車両が通過したタイミングを比較的正確に検出することができる。
【0101】
しかも、特徴物検出センサ31による特徴物の検出処理を、車両がその前方に存在する交差点の近傍に到達した時点で開始させるようにしているため、不要な検出処理を排除して検出処理を効率的に行うことができるとともに、誤検出を生じにくくすることができる。
【0102】
一方、本実施形態のナビゲーション装置10では、運転操作検出センサ32により検出された運転操作情報についても制御用情報として記憶する。したがって、車両制御部41〜44においては、車両の運転者による運転操作に基づく車両制御が可能となる。
【0103】
[5.特許請求の範囲との対応]
本実施形態のナビゲーション装置10では、自車位置検出処理(図5)におけるS101,S102の処理を実行することにより自車位置計算部21として機能する制御部20が、本発明の位置検出手段に相当する。
【0104】
また、地図データベース14から地図データを入力するマップマッチング処理部23として機能する制御部20が、本発明の地図取得手段に相当する。
また、道路情報記憶処理(図7)におけるS301,S302の処理を実行するとともに特徴物検出センサ31からの特徴物候補通知を入力することにより安全制御処理部24として機能する制御部20が、本発明の特徴物検出手段に相当する。
【0105】
また、道路情報記憶処理におけるS303,S308の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の制御点検出手段に相当する。
また、道路情報記憶処理におけるS311の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の情報記憶手段に相当する。
【0106】
また、道路情報通知処理(図13)におけるS402の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の情報出力手段に相当する。
また、道路情報通知処理におけるS404の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明のタイミング通知手段に相当する。
【0107】
[6.他の形態]
以上、本発明の一実施形態について説明したが、本発明は、種々の形態を採り得ることは言うまでもない。
【0108】
(1)上記実施形態では、交差点に存在する特徴物を検出するための特徴物検出センサ31としてバックカメラを用いているが、これに限定されるものではない。
例えば、車両の前方を撮影するフロントカメラを用いることも可能である。ただし、一般に、フロントカメラは真下の画像を撮影しないことから、道路標示を車両が通過するタイミングについては、道路標示までの距離及び車両の速度に基づき算出するとよい。なお、真下の画像を撮影可能なフロントカメラを用いれば、バックカメラと同様、車両が道路標示を通過したタイミングを比較的正確に検出することができる。
【0109】
また、特徴物検出センサ31は、特徴物の位置を検出することができるものであればよいため、カメラに限定されるものではなく、例えばレーダ(レーザレーダ、ミリ波レーダ等)を用いることも可能である。なお、前方はレーダ、下方はカメラというように、レーダとカメラを併用して特徴物を検出するようにしてもよい。
【0110】
(2)上記実施形態では、特徴物として、一時停止線や横断歩道を検出するようにしているが、これに限定されるものではない。
例えば、一時停止線や横断歩道以外の道路標示(道路の両端にある白線等)を検出するようにしてもよい。具体的には、図18(a)に示すように、車両がリンクL1からリンクL2へ走行する場合において、車両の左側の白線が途切れた地点を車両が交差点に進入した地点(制御終了点)として検出し、車両の左側の白線が再び現れた地点を車両が交差点から退出した地点(制御開始点)として検出する。このようにすれば、一時停止線や横断歩道の存在しない交差点についても制御開始点及び制御終了点を検出することができる。
【0111】
また、特徴物は、交差点であることが把握できるものであればよいため、道路標示に限定されるものではなく、例えば道路上又は道路近傍に配置された設置物(信号機や路側器等)とすることも可能である。
【0112】
例えば、歩行者用の信号機のポールを検出した地点を制御開始点又は制御終了点として検出するようにしてもよい。なお、ポールのみを検出する場合には、信号機以外のポールを信号機のポールとして検出することが考えられるため、信号機のポールであることを正確に検出するためには、ポール上部の信号機本体(灯器)を確認した上でポールを検出するとよい。
【0113】
また例えば、交差点に設置された路側器から無線通信により情報を入力した地点を制御開始点又は制御終了点として検出するようにしてもよい。
(3)上記実施形態では、あらかじめ決められた一種類の特徴物(制御開始点については横断歩道、制御終了点については一時停止線)を検出するようにしているが、これに限定されるものではなく、複数種類の特徴物を検出するようにしてもよい。
【0114】
また、地図データに基づき車両の前方に存在する交差点の種類(十字路、T字路、分岐点、合流点等)を判定し、交差点の種類に応じた特徴物を特徴物検出センサ31に検出させるようにしてもよい。例えば、交差点の種類が十字路の場合には特徴物として横断歩道を検出し、交差点の種類がT字路の場合には白線を検出するというように、検出対象の特徴点を変更する。このようにすれば、交差点に存在する可能性の高い特徴物を検出対象とすることができるため、特徴物の検出率を向上させることができる。
【0115】
(4)上記実施形態では、特徴物検出センサ31により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出するようにしているが、これに限定されるものではない。
【0116】
例えば、走行中の道路に対応するリンクが変化した直後に通過した特徴物(横断歩道)を制御開始点として検出し、走行中の道路に対応するリンクが切り替わる直前に通過した特徴物(一時停止線)を制御終了点として検出するようにしてもよい。
【0117】
また例えば、走行中の道路に対応するリンクが変化したタイミングに関係なく、特徴物検出センサ31により検出された特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出するようにしてもよい。
【0118】
具体的には、上記実施形態の図12に示す処理に替えて、図19に示す処理が実行される。
すなわち、図19に示す処理においては、安全制御処理部24は、マップマッチング処理部23からのリンクIDがリンクLNからリンクL1に変化したタイミングに関係なく、特徴物検出センサ31から入力した特徴物候補通知(交差点)に基づき、特徴物候補通知に対応する特徴物の位置を、リンクL1についての制御開始点として判定する。
【0119】
同様に、安全制御処理部24は、マップマッチング処理部23からのリンクIDがリンクL1からリンクL2に変化したタイミングに関係なく、特徴物検出センサ31から入力した特徴物候補通知(一時停止線)に基づき、特徴物候補通知に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。
【0120】
以上のように、マップマッチングの精度が低くリンクIDの変化のタイミングにばらつきが生じるような場合でも、特徴物検出センサ31による特徴物の検出精度が高ければ、特徴物検出センサ31の検出結果を優先することで、制御開始点及び制御終了点を精度よく検出することができる。
【0121】
(5)上記実施形態では、特徴物検出センサ31により検出された特徴物に基づき制御開始点及び制御終了点を検出するようにしているが、これに限定されるものではなく、特徴物検出センサ31を用いずに制御開始点及び制御終了点を検出することも可能である。
【0122】
例えば、走行中の道路に対応するリンクが変化した地点を制御開始点及び制御終了点として検出するようにしてもよい。
また例えば、車両のステアリング角度の変化が所定の条件を満たした地点を制御開始点及び制御終了点として検出するようにしてもよい。具体的には、ステアリング角度に基づき交差点を曲がろうとする操作が行われたと判定した場合にその地点を制御終了点として検出し、その後にハンドルを戻す操作が行われたと判定した場合にその地点を制御開始点として検出する。また、車両が交差点を通過するにもかかわらす交差点を曲がろうとする操作が行われないと判定した場合にはその地点を制御終了点及び制御開始点として検出する。このように、ステアリング角度の変化に基づき制御開始点及び制御終了点を検出することが可能である。
【0123】
(6)上記実施形態では、実際の道路における各交差点の中央位置に設定されたノードと、ノード間を接続するリンクとにより道路が表された地図データを想定しているが(図2)、地図データとしては、1つの交差点に対して複数のノードが設定された道路が含まれているものも考えられる。すなわち、図18(b)に示すように、例えば中央分離帯を有する道路においてその中央分離帯を挟んで2本のリンクが割り当てられている場合である。この場合、十字路においては4つのノードが設定され、各ノード間を接続する部分がそれぞれリンクとなる。したがって、車両がリンクL1からリンクL4へ走行する間に、リンクがL1→L2→L3→L4と3回変化する。そこで、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つ(例えば最初の変化)のみをリンクが変化した地点とみなすとよい。具体的には、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定する。このようにすれば、複数のノードが設定された交差点においても、リンクが変化した地点を1つに特定することができる。この結果、制御開始点及び制御終了点を正常に検出することができる。
【0124】
(7)上記実施形態では、絶対走行軌跡全域についての運転操作情報を制御用情報として記憶するようにしているが、これに限定されるものではなく、例えば、カーブ路等の特定の区間でのみ記憶するようにしてもよい。また、運転操作情報自体を制御用情報として記憶しない構成とすることも可能である。
【0125】
(8)上記実施形態では、制御用情報をリンク単位(交差点から次の交差点までの道路単位)で記憶するようにしているが、これに限定されるものではなく、複数のリンクを1単位として制御用情報を記憶するようにしてもよい。具体的には、例えば、国道等のように複数車線からなる大きな道路と、一車線しかない小さな道路とが交わっている場合には、各交差点ごとに制御用情報を区切るよりも、大きな道路同士が交わる交差点で区切った方が好ましいと考えられる。そこで、このような道路については、複数のリンクを1単位とすることで、道路に適した制御用情報を記憶することができる。
【0126】
(9)上記実施形態では、制御用情報を、各車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力するようにしているが、これに限定されるものではなく、制御用情報をそのまま出力する構成とすることも可能である。
【0127】
(10)上記実施形態では、制御開始点を始点としかつ制御終了点を終点とする絶対走行軌跡を記憶するようにしているが、これに限定されるものではない。例えば、制御開始点よりも前の地点を始点とし、制御終了点よりも後の地点を終点とする絶対走行軌跡を記憶し、制御開始点及び制御終了点を別途記憶する構成とすることも可能である。
【0128】
(11)上記実施形態では、本発明の制御用情報記憶装置をナビゲーション装置10に適用した例について説明したが、これに限定されるものではなく、ナビゲーション装置とは別の装置として構成することも可能である。
【図面の簡単な説明】
【0129】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図である。
【図2】地図データに記憶されている道路の説明図である。
【図3】十字路における特徴点検出の説明図である。
【図4】制御用情報通知処理のフローチャートである。
【図5】自車位置検出処理のフローチャートである。
【図6】走行道路特定処理のフローチャートである。
【図7】道路情報記憶処理のフローチャートである。
【図8】記憶部に記憶される制御用情報の説明図である。
【図9】進行方向ごとの走行軌跡を説明するための説明図である。
【図10】進行方向の判定手法についての説明図である。
【図11】道路情報記憶処理により実現される処理を説明するための説明図である。
【図12】道路情報記憶処理に対応するタイムチャートである。
【図13】道路情報通知処理のフローチャートである。
【図14】制御用情報の加工処理を表す説明図である。
【図15】平均勾配及びコーナーRの算出方法を説明する説明図である。
【図16】道路情報通知処理に対応するタイムチャートである。
【図17】ナビゲーション装置により実行される処理に対応するタイムチャートである。
【図18】交差点における特徴点検出の説明図である。
【図19】特徴物検出センサの検出結果を優先した処理に対応するタイムチャートである。
【符号の説明】
【0130】
10…ナビゲーション装置、11…GPSセンサ、12…方位センサ、13…距離センサ、14…地図データベース、20…制御部、21…自車位置計算部、22…走行軌跡メモリ、23…マップマッチング処理部、24…安全制御処理部、24a…記憶部、24b…情報加工部、31…特徴物検出センサ、32…運転操作検出センサ、41…低燃費制御部、42…ライト制御部、43…ACC制御部、44…先読み制御部
【技術分野】
【0001】
本発明は、車両制御に利用するための制御用情報を記憶する制御用情報記憶装置に関するものである。
【背景技術】
【0002】
従来、ナビゲーション装置の地図データを利用して道路状況に応じた車両制御を行うことが考えられている。このような車両制御を精度よく実現するためには、ナビゲーション装置の地図データが正確であることが要求されるが、現状の地図データは車両制御を行うのに十分な正確性を有しているとはいえない。
【0003】
そこで、車両の走行軌跡を車両制御に利用するための制御用情報として保存し、その制御用情報を利用して車両制御を行う技術が提案されている。
例えば特許文献1には、車両に搭載されたセンサにより検出した道路情報を用いて車両制御に用いられる道路情報データベースを作成する際に、平均値の精度を向上させることができるようにした道路情報学習システムが開示されている。このシステムでは、車両走行時に道路に関する道路情報を検出し、道路情報から構成される道路情報データベースを、道路地図情報における位置情報に関連づけて記憶する。そして、道路情報データベースの平均値及び標準偏差を用いて平均値を中心とする道路情報選別用の基準範囲を設定し、道路情報が基準範囲に含まれる場合に、道路情報を道路情報データベースの更新用に採用する。このようにすることで、ばらつきの多いデータを事前に除去し、道路情報データベースの平均値の精度を向上させるようにしている。
【0004】
また、例えば特許文献2には、既に登録されている道路についてデータベースを修正し、地図上の道路の形状と実道路の形状とを一致させることができるようにしたデータベース修正装置が開示されている。このデータベース修正装置では、現在位置及びノードデータに基づいて車両が走行した道路を特定し、特定した道路に関する走行路データと車両の走行軌跡を表す走行軌跡データとに基づいてデータベースを修正する。そして、車両が走行した区間を分割し、分割した区間の走行軌跡データにおける走行軌跡の軌跡始点及び軌跡終点のうちの少なくとも一方が直線区間にあるかどうかを判断して、直線区間にない場合、軌跡始点及び軌跡終点のうちの少なくとも一方を変更する。
【0005】
さらに、例えば特許文献3には、車線を含めた実際の道路形状と、記憶している道路情報による道路の形状とを一致させることができるようにした道路情報の修正装置が開示されている。この修正装置は、記憶している道路情報を、実際の道路を走行した際の車両の走行軌跡情報に基づいて修正するものであり、道路情報が双方向通行可能な道路を一の道路形状として表現可能なものである場合、走行軌跡情報に基づいて道路情報を進行方向ごとに修正する。
【特許文献1】特開2005−091071号公報
【特許文献2】特開2001−141467号公報
【特許文献3】特開2005−121707号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
前述したような従来の構成では、車両の走行軌跡に基づき実際の道路形状に合った車両制御を行うことについては考慮されているものの、車両制御を実行するタイミングの精度については十分検討されていなかった。
【0007】
本発明は、こうした問題にかんがみてなされたものであり、車両制御を実行するタイミングの精度を向上させることを目的としている。
【課題を解決するための手段】
【0008】
上記目的を達成するためになされた本発明の請求項1に記載の制御用情報記憶装置では、情報記憶手段が、車両の現在位置に基づく走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する。そして、制御点検出手段が、車両が交差点から退出した地点を車両制御の制御開始点として検出し、情報記憶手段は、制御点検出手段により検出された制御開始点を制御用情報として記憶する。なお、「交差点」とは、複数の道路が接続された地点全般のことであり、十字路、T字路、分岐点、合流点等が含まれる。
【0009】
このように、本発明の制御用情報記憶装置は、車両制御に利用するための制御用情報として、車両の走行軌跡とともに車両制御の制御開始点を記憶する。したがって、このような制御用情報に基づく車両制御においては、車両の走行軌跡に基づき実際の道路の道路形状に合った車両制御が可能となるだけでなく、制御開始点に基づき車両制御の開始タイミングを高い精度で特定することが可能となる。
【0010】
そして、例えば請求項2に記載のように、情報記憶手段が、制御点検出手段により検出された制御開始点を始点とする走行軌跡を記憶するようにすれば、車両の走行軌跡と車両制御の制御開始点とを効率よく記憶することができる。
【0011】
また、請求項3に記載の制御用情報記憶装置では、情報出力手段が、情報記憶手段により記憶されている制御用情報を外部へ出力する。このような構成によれば、制御用情報記憶装置に記憶されている制御用情報を容易に利用することができる。
【0012】
具体的には、例えば請求項4に記載のように、情報出力手段は、制御用情報を、車両制御を行う車両制御手段へ出力するように構成すれば、制御用情報記憶装置に記憶されている制御用情報に基づく車両制御を車両制御手段に行わせることができる。
【0013】
この場合には、請求項5に記載のように、タイミング通知手段が、情報記憶手段により走行軌跡が記憶されている道路に車両が進入したタイミングとして、制御点検出手段により検出された制御開始点を車両が通過したタイミングを車両制御手段へ通知するとよい。このような構成によれば、制御用情報として出力した走行軌跡に対する車両の現在位置を、制御開始点に基づき高い精度で特定させることができる。この結果、車両制御手段により行われる車両制御のタイミングの精度を高めることができる。
【0014】
また、情報出力手段は、制御用情報をそのまま車両制御手段へ出力してもよいが、例えば請求項6に記載のように、制御用情報を、情報の加工処理を行った上で車両制御手段へ出力すれば、車両制御手段において必要となる情報のみを送信することが可能となる。
【0015】
特に、請求項7に記載のように、情報出力手段が、制御用情報を、複数種類の車両制御手段へ、各車両制御手段に応じた情報の加工処理を行った上で出力するように構成すれば、各車両制御手段において必要となる情報のみを送信することが可能となる。この結果、制御用情報の出力を効率よく行うことができる。なお、複数種類の車両制御手段へ出力する制御用情報の中には、情報の加工処理が行われないものが含まれていてもよい。
【0016】
ところで、制御点検出手段による制御開始点の検出は、具体的には次のような手法で行うことができる。
すなわち、例えば請求項8に記載の制御用情報記憶装置では、制御点検出手段は、車両のステアリング角度の変化が所定の条件を満たした地点を制御開始点として検出する。このような構成によれば、ステアリング角度の変化が安定して得られるほど、制御開始点を高い精度で検出することが可能となる。
【0017】
また、例えば請求項9に記載の制御用情報記憶装置では、地図取得手段が、交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する。そして、制御点検出手段は、車両が走行中の道路に対応するリンクが変化した地点を制御開始点として検出する。このような構成によれば、リンクの変化する地点が安定して得られるほど、制御開始点を高い精度で検出することが可能となる。
【0018】
また、例えば請求項10に記載の制御用情報記憶装置では、特徴物検出手段が、道路に存在する特徴物を検出し、地図取得手段が、交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する。そして、制御点検出手段は、特徴物検出手段により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点として検出する。このような構成によれば、リンクの変化する地点が安定して得られ、かつ、特徴物検出手段による特徴物の検出精度が高いほど、制御開始点を高い精度で検出することが可能となる。なお、「特徴物」とは、道路に存在しかつ車両から検出可能なもののことであり、例えば、道路上に描かれている道路標示(一時停止線や横断歩道等)や、道路上又は道路近傍に配置された設置物(信号機や路側器等)などが含まれる。
【0019】
また、例えば請求項11に記載の制御用情報記憶装置では、特徴物検出手段が、道路に存在する特徴物を検出する。そして、制御点検出手段は、特徴物検出手段により検出された特徴物を車両が通過した地点を制御開始点として検出する。このような構成によれば、特徴物検出手段による特徴物の検出精度が高いほど、制御開始点を高い精度で検出することが可能となる。
【0020】
ここで、特徴物検出手段は、請求項12に記載のように、交差点であることが把握できるものを特徴物として検出するものであることが好ましい。
また、特徴物検出手段は、請求項13に記載のように、車両がその前方に存在する交差点の近傍に到達した時点で、特徴物の検出を開始するとよい。このようにすれば、検出を効率的に行うことができるとともに、誤検出を生じにくくすることができる。
【0021】
特に、請求項14に記載のように、特徴物検出手段が、車両の前方に存在する交差点の種類に応じた特徴物を検出するものであれば、特徴物の検出率を向上させることができる。
【0022】
一方、前述した請求項9,10のようにリンクの変化する地点に基づき制御開始点を検出する構成では、1つの交差点に対して複数のノードが設定されている場合には、制御開始点を正常に検出できないことが考えられる。
【0023】
そこで、請求項15に記載の制御用情報記憶装置では、制御点検出手段が、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つのみをリンクが変化した地点とみなす。このような構成によれば、複数のノードが設定された交差点においても、リンクが変化した地点を1つに特定することができる。この結果、制御開始点を正常に検出することができる。
【0024】
具体的には、例えば請求項16に記載のように、制御点検出手段は、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定することができる。
【0025】
ところで、車両の走行軌跡は、同一の道路であっても進行方向の違いにより異なることが考えられる。そこで、請求項17に記載のように、情報記憶手段が、同一の道路について車両の進行方向別に制御用情報を記憶するとよい。このようにすれば、各進行方向に適した制御用情報を記憶することができる。
【0026】
また、制御用情報としては、走行軌跡以外の情報も利用することができる。すなわち、請求項18に記載の制御用情報記憶装置では、情報記憶手段が、車両の運転者による運転操作を制御用情報として記憶する。このような制御用情報に基づく車両制御においては、車両の運転者による運転操作に基づく車両制御が可能となる。
【0027】
また、請求項19に記載の制御用情報記憶装置では、制御点検出手段が、車両が交差点に進入した地点を車両制御の制御終了点として検出し、情報記憶手段は、制御点検出手段により検出された制御終了点を制御用情報として記憶する。したがって、このような制御用情報に基づく車両制御においては、制御終了点に基づき車両制御の終了タイミングを高い精度で特定することが可能となる。
【0028】
そして、例えば請求項20に記載のように、情報記憶手段が、制御点検出手段により検出された制御終了点を終点とする走行軌跡を記憶するようにすれば、車両の走行軌跡と車両の制御終了点とを効率よく記憶することができる。
【0029】
次に、請求項21に記載のプログラムは、請求項1から請求項20までのいずれか1項に記載の制御用情報記憶装置が備える各手段としてコンピュータを機能させるものである。例えば、請求項1に記載の制御用情報記憶装置が備える各手段としてコンピュータを機能させるプログラムは、次のような構成となる。
【0030】
車両の現在位置を検出する位置検出手段、前記位置検出手段により検出された現在位置に基づく車両の走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する情報記憶手段、及び、車両が交差点から退出した地点を前記車両制御の制御開始点として検出する制御点検出手段、としてコンピュータを機能させるプログラムであって、前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を前記制御用情報として記憶することを特徴とするプログラム。
【0031】
このようなプログラムによれば、コンピュータを用いて前述した制御用情報記憶装置を構築することができ、これにより前述した効果を得ることができる。特に、プログラムはネットワーク等を利用して流通させることも可能である上、プログラムの入れ替えは部品の入れ替えに比較して容易であるため、制御用情報記憶装置の機能向上等を容易に行うことができる。
【発明を実施するための最良の形態】
【0032】
以下、本発明が適用された実施形態について、図面を用いて説明する。
[1.構成の説明]
図1は、実施形態のナビゲーション装置10の概略構成を示すブロック図である。
【0033】
ナビゲーション装置10は、車両に搭載された状態で用いられるものであり、GPSセンサ11と、方位センサ12と、距離センサ13と、地図データベース14と、制御部20とを備えている。
【0034】
GPSセンサ11は、GPS(Global Positioning System)用の人工衛星からの電波をGPSアンテナを介して受信し、当該ナビゲーション装置10が搭載されている車両(以下、単に「車両」という)の絶対位置(緯度、経度及び高度)を検出する。
【0035】
方位センサ12は、地磁気に基づき車両の絶対方位を検出する。
距離センサ13は、車両の走行距離を検出する。
地図データベース14には、地図に関する種々の情報からなる地図データが記憶されている。この地図データにおいて、車両が走行する道路は、実際の道路における各交差点の中央位置に設定されたノードと、ノード間を接続するリンクとにより表されている。すなわち、図2に示すように、地図データに記憶されている道路は、リンク単位に分割して管理されており、各リンクはその端点(ノード)において他のリンクと接続されている。そして、各リンクには固有の識別子であるリンクID(道路識別子)が付与されており、リンクIDを用いてリンクを特定することが可能となっている。ここで、「交差点」とは、複数の道路が接続された地点全般のことであり、十字路、T字路、分岐点、合流点等が含まれる。つまり、3つ以上のリンクが接続される点がノードとなる。
【0036】
なお、地図データベース14は、ハードディスク装置に地図データを記憶するように構成してもよく、また、磁気ディスク、光磁気ディスク、半導体製メモリ等などの可搬型記憶媒体から地図データを読み出す構成とすることも可能である。
【0037】
制御部20は、CPU、ROM、RAM、I/O及びこれらの構成を接続するバスラインなどからなるマイクロコンピュータを中心に構成されており、各種処理を実行する。例えば、GPSセンサ11、方位センサ12及び距離センサ13からの各検出信号に基づき車両の現在位置(絶対位置)を検出するとともに、地図データベース14に記憶されている地図データから現在位置周辺の地図を読み出して、車両の現在位置を表す自車位置マークとともに図示しない表示部(ディスプレイ)に表示させる現在位置表示処理や、現在位置から目的地までの最適な経路を検索して案内する経路案内処理等を実行する。なお、ROMには、後述する処理(図4〜図7,図13)を実行するためのプログラムが記憶されている。
【0038】
また、制御部20には、車両に搭載された特徴物検出センサ31及び運転操作検出センサ32からの情報が入力される。
特徴物検出センサ31は、交差点に存在する特徴物を検出するためのものである。ここで、特徴物とは、検出することにより交差点であることが把握できるものであり、本実施形態では、特徴物として、道路上に描かれている道路標示(例えば一時停止線や横断歩道)を検出する。また、本実施形態では、特徴物検出センサ31として、車両の後端部における上方位置から下方(真下を含む)を撮影するように配置されたバックカメラが用いられている。
【0039】
運転操作検出センサ32は、車両の運転者により行われる運転操作を表す情報(以下「運転操作情報」という。)を検出するためのものである。本実施形態では、運転操作情報として、ステアリング角度、車両の速度及び加速度を検出する。
【0040】
一方、本実施形態のナビゲーション装置10が搭載される車両には、車両制御を行う複数の車両制御部(車両制御手段)41〜44が搭載されている。具体的には、車両前方の道路形状に応じて燃費を向上させるように駆動力制御を行う低燃費制御部41と、車両前方の道路形状に応じて前照灯の光軸方向を調整する制御を行うライト制御部42と、先行車との距離及び相対速度並びに自車の走行状態に基づき設定される目標加速度が得られるように自車両のエンジン、ギア、ブレーキ等を制御することで先行車との適正車間距離を保持するアダプティブ・クルーズ・コントロールを行うACC制御部43と、車両前方の道路状況に応じて運転操作をサポートする制御を行う先読み制御部44とが搭載されている。
【0041】
そして、本実施形態のナビゲーション装置10は、交差点から次の交差点までの区間の道路(交差点の退出路)で行われる車両制御に利用するための制御用情報をリンク単位で記憶する。具体的には、車両が交差点から退出したと判定した地点を車両制御の制御開始点として検出し、車両が次の交差点に進入したと判定した地点を車両制御の制御終了点として検出する。本実施形態では、図3に示すように、車両が交差点進入時に通過する一時停止線を制御終了点として検出し、車両が交差点退出時に通過する交差点を制御開始点として検出する。そして、車両の絶対位置に基づく走行軌跡(以下「絶対走行軌跡」という。)を、制御開始点を始点としかつ制御終了点を終点として制御用情報として記憶し、制御用情報が既に記憶されている道路を走行する際に車両制御部41〜44へ出力する。これにより、車両制御部41〜44においては、実際の道路形状に基づく高精度な車両制御を実現することが可能となる。特に、ナビゲーション装置10から車両制御部41〜44へ、車両が制御開始点や制御終了点を通過した通過タイミングを出力することにより、車両制御のタイミングの精度を高めることができる。
【0042】
[2.処理の説明]
次に、制御部20が実行する処理の具体的内容について説明する。
図1に示すように、制御部20は、自車位置計算部21、走行軌跡メモリ22、マップマッチング処理部23及び安全制御処理部24として機能する。特に、安全制御処理部24は、記憶部24a及び情報加工部24bとしても機能する。なお、これら各機能はそれぞれ独立したハードウェアにより実現することも可能であるが、本実施形態では共通のハードウェアにより実現している。
【0043】
そして、制御部20は、図4のフローチャートに示す制御用情報通知処理を定期的(時間t(例えば100ms)ごと)に実行する。すなわち、この制御用情報通知処理が開始されると、まずS100で、自車位置計算部21が、後述する自車位置検出処理を行う(図5)。続いて、S200では、マップマッチング処理部23が、後述する走行道路特定処理を行う(図6)。続いて、S300では、安全制御処理部24が、後述する道路情報記憶処理を行う(図7)。続いて、S400では、安全制御処理部24が、後述する道路情報通知処理を行う(図13)。その後、制御用情報通知処理を終了する。
【0044】
ここで、S100〜S400の各処理内容について具体的に説明する。
まず、自車位置計算部21が実行する自車位置検出処理(S100)について、図5のフローチャートを用いて説明する。
【0045】
この自車位置検出処理が開始されると、まずS101で、GPSセンサ11、方位センサ12及び距離センサ13から検出値を入力する。
続いて、S102では、S101で入力した検出値に基づき、車両の現在位置(絶対位置)を表す絶対位置情報と、時間tだけ前の状態を基準とした相対方位及び走行距離とを検出する。
【0046】
続いて、S103では、相対方位及び走行距離を走行軌跡メモリ22へ出力し、絶対位置情報をマップマッチング処理部23及び安全制御処理部24へそれぞれ出力する。その後、自車位置検出処理を終了する。なお、走行軌跡メモリ22は、自車位置計算部21から相対方位及び走行距離を入力すると、相対的な走行軌跡(以下「相対走行軌跡」という。)を表す走行軌跡データとして記憶(蓄積)する。
【0047】
次に、マップマッチング処理部23が実行する走行道路特定処理(S200)について、図6のフローチャートを用いて説明する。
この走行道路特定処理が開始されると、まずS201で、自車位置計算部21から入力した絶対位置情報に基づいて初期位置を決定する。
【0048】
続いて、S202では、地図データベース14に記憶されている地図データの表す地図を基準として車両の現在位置を補正するマップマッチング処理を行う。具体的には、走行軌跡メモリ22に記憶されている走行軌跡データの表す相対走行軌跡と、地図データの表す道路パターンとを比較し、相対走行軌跡と最も相関の高い道路パターンを走行中の道路として判別して(パターンマッチング)、その道路パターンと整合するように車両の現在位置を補正する。
【0049】
続いて、S203では、車両が現在走行中の道路に対応するリンクのリンクIDを地図データから取得する。
続いて、S204では、S203で取得したリンクIDを安全制御処理部24へ出力する。
【0050】
続いて、S205では、車両が前方の道路に存在する交差点の近傍に到達したか否か(具体的には、現在走行中の道路に対応するリンクの終了点に接近したことの判定基準となる地点(例えば残り20mの地点)を通過したか否か)を判定する。なお、この判定処理では、車両が交差点の近傍に到達したことさえ判断できればよく、高い判定精度は必要とされない。
【0051】
そして、S205で、前方の道路に存在する交差点の近傍に到達したと判定した場合には、S206へ移行し、リンク変更接近通知を安全制御処理部24へ出力する。その後、走行道路特定処理を終了する。
【0052】
一方、S205で、前方の道路に存在する交差点の近傍に到達していないと判定した場合には、S206の処理を行わずに走行道路特定処理を終了する。
次に、安全制御処理部24が実行する道路情報記憶処理(S300)について、図7のフローチャートを用いて説明する。
【0053】
この道路情報記憶処理が開始されると、まずS301で、マップマッチング処理部23からリンク変更接近通知が入力されたか否かを判定する。
そして、S301で、リンク変更接近通知が入力されたと判定した場合には、S302へ移行し、特徴物検出センサ31に対して特徴物検出要求を出力した後、S303へ移行する。すなわち、本実施形態において、特徴物検出センサ31は、ナビゲーション装置10の制御部20から特徴物検出要求を入力した場合にのみ特徴物の検出処理(撮影及び画像解析)を開始する。このようにすることで、車両が交差点近傍に存在している期間にのみ特徴物検出センサ31による検出処理が行われるようにしている。そして、特徴物検出センサ31は、特徴物の検出処理により特徴物(本実施形態では一時停止線及び横断歩道)を検出した場合(換言すれば、車両が特徴物の位置を通過した場合)に、その旨を表す特徴物候補通知をナビゲーション装置10の制御部20へ出力する。したがって、車両が特徴物の位置を通過したタイミングで、特徴物候補通知が入力される。なお、特徴物検出センサ31が特徴物の検出処理を終了するタイミングは、例えば、時間や走行距離に基づき決定してもよく、また、地図上の車両の位置に基づき決定してもよい。
【0054】
一方、S301で、リンク変更接近通知が入力されていないと判定した場合には、S302の処理を行わずにS303へ移行する。
S303では、車両が交差点から退出したか否か(換言すれば、制御開始点が検出されたか否か)を判定する。具体的には、特徴物検出センサ31から横断歩道の検出を表す特徴物候補通知が入力された地点のうち、マップマッチング処理部23から入力したリンクIDが変化した地点に最も近い地点を、制御開始点として検出する。つまり、車両が走行中の道路に対応するリンクが変化した地点に最も近い横断歩道が制御開始点として検出される。
【0055】
そして、S303で、制御開始点が検出されたと判定した場合には、S304へ移行し、絶対走行軌跡等の情報を記憶する状態を表すフラグである記憶フラグをオンする。
続いて、S304では、制御開始点を通過したことを表すフラグである開始点通過フラグをオンする。その後、S306へ移行する。なお、開始点通過フラグは、道路情報記憶処理の開始時にオフにされる。
【0056】
一方、S303で、制御開始点が検出されていないと判定した場合には、S304,S305の処理を行わずにS306へ移行する。
S306では、記憶フラグがオンとなっているか否かを判定する。なお、記憶フラグは、前述したように制御開始点が検出された時点でオンされ、後述するように制御終了点が検出された時点でオフされる。
【0057】
そして、S306で、記憶フラグがオンとなっていると判定した場合には、S307へ移行し、自車位置計算部21から入力した絶対位置情報と、運転操作検出センサ32から入力した運転操作情報とを一時的に記憶する。その後、S308へ移行する。
【0058】
一方、S306で、記憶フラグがオンとなっていないと判定した場合には、S307の処理を行わずにS308へ移行する。
S308では、車両が交差点に進入したか否か(換言すれば、制御終了点が検出されたか否か)を判定する。具体的には、特徴物検出センサ31から一時停止線の検出を表す特徴物候補通知が入力された地点のうち、マップマッチング処理部23から入力したリンクIDが変化した地点に最も近い地点を、制御終了点として検出する。つまり、車両が走行中の道路に対応するリンクが変化した地点に最も近い一時停止線が制御終了点として検出される。
【0059】
そして、S308で、制御終了点が検出されたと判定した場合には、S309へ移行し、記憶フラグをオフする。
続いて、S310では、制御終了点を通過したことを表すフラグである終了点通過フラグをオンする。なお、終了点通過フラグは、道路情報記憶処理の開始時にオフにされる。
【0060】
続いて、S311では、S307で記憶した絶対位置情報及び運転操作情報を、制御用情報として記憶部24aに記憶した後、道路情報記憶処理を終了する。
具体的には、制御用情報は、図8に示すように、リンク単位で、かつ、車両の進行方向別に(各リンクにつき2種類)記憶される。すなわち、図9に示すように、同一のリンクL1に対応する道路を走行する場合であっても、その道路を右→左の進行方向で走行する場合(破線)と、左→右の進行方向で走行する場合(点線)とでは、走行する車線が異なることに伴い走行軌跡が異なるものとなる。特に、道路がカーブ形状の場合にはその違いが顕著となる。したがって、同一リンクであっても、進行方向別に制御用情報を記憶するようにしている。なお、図9において、N1,N2はリンクL1の各端部に対応するノードであり、S1,S2はリンクL1の形状を表すための形状点である。
【0061】
ここで、進行方向の判定手法について説明する。本実施形態では、リンクにおける車両の進行方向を、そのリンクへ進入する以前に走行していたリンクに基づき判定する。具体的には、図10に示すように、リンクL1,L2,L3のいずれかからリンクL4に進入した場合には、リンクL4における車両の進行方向は、図面上、左→右であると判定することができる。逆に、リンクL5,L6のいずれかからリンクL4に進入した場合には、リンクL4における車両の進行方向は、図面上、右→左であると判定することができる。なお、進行方向の判定手法はこれに限定されるものではなく、例えば車両の現在位置の変化や車両の方位に基づき判定することも可能である。
【0062】
制御用情報としては、道路形状(緯度及び経度)、道路勾配(高度)、車両の速度及び加速度、ステアリング角度等を記憶する。なお、道路形状及び道路勾配は、絶対位置情報から取得され、車両の速度及び加速度並びにステアリング角度は、運転操作情報から取得される。また、制御用情報は、制御開始点から制御終了点までの区間分のみを記憶する。
【0063】
なお、リンクID及び進行方向が同一の制御用情報が既に記憶されている場合には、既存の情報を消去して新たな情報を記憶したり、既存の情報と新たな情報とを比較して精度が高いと判断される情報を選択したり、情報を平均化するように更新したりすることが考えられる。
【0064】
一方、S308で、制御終了点が検出されていないと判定した場合には、S309〜S311の処理を行わずに道路情報記憶処理を終了する。
ここで、以上説明した道路情報記憶処理により実現される処理の具体例として、図11に示すように車両がリンクL1からリンクL2へ走行する場合を例に挙げて説明する。
【0065】
図12に示すように、車両がリンクL1の手前のリンクLNを走行中は、マップマッチング処理部23から安全制御処理部24へリンクLNについてのリンクIDが出力される。そして、車両が交差点(リンクL1の開始点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
【0066】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0067】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクLNからリンクL1に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(交差点)に対応する特徴物の位置を、リンクL1についての制御開始点として判定する。そして、リンクL1についての制御用情報として、自車位置計算部21からの絶対位置情報と、運転操作検出センサ32からの運転操作情報とを記憶する。
【0068】
その後、車両が交差点(リンクL1の終了点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0069】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクL1からリンクL2に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(一時停止線)に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。
【0070】
以上のような処理により、リンクL1についての制御用情報として、制御開始点から制御終了点までの絶対走行軌跡及び運転操作情報が記憶される。
次に、安全制御処理部24が実行する道路情報通知処理(S400)について、図13のフローチャートを用いて説明する。
【0071】
この道路情報通知処理が開始されると、まずS401で、現在走行中の道路に対応するリンクについての制御用情報であって車両の進行方向が一致するものが記憶部24aに記憶されているか否かを判定する。
【0072】
そして、S401で、制御用情報が記憶されていると判定した場合には、S402へ移行し、その制御用情報を記憶部24aから読み出し、各車両制御部41〜44へ出力する。具体的には、図14に示すように、制御用情報を、各車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力する。すなわち、車両制御部41〜44は、それぞれ車両制御の内容が異なるため、必要とする情報も異なる。例えば、低燃費制御部41では、車両前方の道路の平均勾配やコーナーRが必要となる。また例えば、ライト制御部42では、車両前方の道路のコーナーRやカーブ開始点が必要となる。そこで、記憶されている制御用情報を元に、各車両制御部41〜44用の情報を作成した上で各車両制御部41〜44へ出力するようにしている。具体的には、平均勾配は、図15(a)に示すように、現在位置からN個分の勾配データを利用し、一定の間隔分の区間の勾配平均値を計算することにより求める。また、コーナーRは、図15(b)に示すように、現在位置からN個分の形状データを読み込み計算することにより求める。
【0073】
続いて、S403では、開始点通過フラグがオンとなっているか否かを判定する。なお、開始点通過フラグは、前述した道路情報記憶処理(図7)におけるS304でオンされる。
【0074】
このS403で、開始点通過フラグがオンとなっていると判定した場合には、S404へ移行し、開始点通過通知を各車両制御部41〜44へ出力する。これにより、各車両制御部41〜44は、制御開始点を車両が通過したタイミング(換言すれば、制御用情報として出力した絶対走行軌跡に対応する道路に車両が進入したタイミング)を把握することができる。
【0075】
続いて、S405では、開始点通過通知を送信したことを表す通知済みフラグをオンする。その後、S406へ移行する。
一方、S401で制御用情報が記憶されていないと判定した場合や、S403で開始点通過フラグがオンとなっていないと判定した場合には、そのままS406へ移行する。
【0076】
S406では、終了点通過フラグがオンとなっているか否かを判定する。なお、終了点通過フラグは、前述した道路情報記憶処理(図7)におけるS310でオンされる。
このS406で、終了点通過フラグがオンとなっていると判定した場合には、S407へ移行し、通知済みフラグがオンしているか否かを判定する。なお、通知済みフラグは、前述したように開始点通過通知を送信した時点でオンされ、後述するように終了点通過通知を送信した時点でオフされる。
【0077】
そして、S407で、通知済みフラグがオンとなっていると判定した場合には、S408へ移行し、終了点通過通知を各車両制御部41〜44へ出力する。これにより、各車両制御部41〜44は、制御終了点を車両が通過したタイミング(換言すれば、制御用情報として出力した絶対走行軌跡に対応する道路から車両が退出したタイミング)を把握することができる。
【0078】
続いて、S409では、通知済みフラグをオフする。その後、道路情報通知処理を終了する。
一方、S406で終了点通過フラグがオンとなっていないと判定した場合や、S407で通知済みフラグがオンとなっていないと判定した場合には、そのまま道路情報通知処理を終了する。
【0079】
ここで、以上説明した道路情報通知処理により実現される処理の具体例として、図11に示すように車両がリンクL1からリンクL2へ走行する場合を例に挙げて説明する。
図16に示すように、車両がリンクL1の手前のリンクLNを走行中は、マップマッチング処理部23から安全制御処理部24へリンクLNについてのリンクIDが出力される。そして、車両が交差点(リンクL1の開始点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
【0080】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0081】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクLNからリンクL1に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(交差点)に対応する特徴点の位置を、リンクL1についての制御開始点として判定する。そして、開始点通過通知を各車両制御部41〜44へ出力する。
【0082】
また、安全制御処理部24は、リンクL1についての制御用情報を車両制御部41〜44へ出力する。なお、制御用情報は一度に出力してもよく、複数回に分けて出力してもよい。
【0083】
その後、車両が交差点(リンクL1の終了点)の近傍に到達すると、マップマッチング処理部23から安全制御処理部24へリンク変更接近通知が出力される。
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0084】
安全制御処理部24は、マップマッチング処理部23からのリンクIDと、特徴物検出センサ31からの特徴物候補通知とに基づき、リンクIDがリンクL1からリンクL2に変化したタイミングに最も近いタイミングで入力した特徴物候補通知(一時停止線)に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。そして、終了点通過通知を各車両制御部41〜44へ出力する。
【0085】
以上のような処理により、リンクL1についての制御用情報、開始点通過通知及び終了点通過通知の出力が行われる。
[3.処理の具体例]
次に、実施形態のナビゲーション装置10により実行される処理について、ライト制御部42に対する制御用情報の出力を例に挙げて、図17のタイムチャートを用いて説明する。
【0086】
まず、車両が対象の道路を初めて走行する場合について説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出値に基づき検出した絶対位置情報を安全制御処理部24へ定期的に出力する。
【0087】
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行う。そして、車両が交差点の近傍に到達すると、リンク変更接近通知を安全制御処理部24へ出力する。
【0088】
安全制御処理部24は、マップマッチング処理部23からリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0089】
安全制御処理部24は、特徴物候補通知及びリンクIDに基づき、制御開始点を判定する。そして、車両の進行方向を判定するとともに、自車位置計算部21からの絶対位置情報及び運転操作検出センサ32からの運転操作情報を記憶する。その後、マップマッチング処理部23から再びリンク変更接近通知を入力すると、特徴物検出センサ31へ特徴物検出要求を出力する。これにより、特徴物検出センサ31は、特徴物の検出処理を開始し、特徴物(一時停止線及び横断歩道)を検出した場合に、その旨を表す特徴物候補通知を安全制御処理部24へ出力する。
【0090】
安全制御処理部24は、特徴物候補通知及びリンクIDに基づき、制御終了点を判定する。このようにして判定した制御開始点から制御終了点までの絶対走行軌跡及び運転操作情報を、制御用情報として記憶する。
【0091】
次に、車両が対象の道路を2回目に走行する場合について説明する。
車両の走行中、自車位置計算部21は、GPSセンサ11、方位センサ12及び距離センサ13からの検出値に基づき検出した絶対位置情報を安全制御処理部24へ定期的に出力する。
【0092】
マップマッチング処理部23は、走行軌跡メモリ22に記憶されている走行軌跡データと地図データベース14に記憶されている地図データとに基づきマップマッチング処理を行う。そして、車両が交差点の近傍に到達すると、リンク変更接近通知を安全制御処理部24へ出力する。
【0093】
安全制御処理部24は、前述のように、制御開始点を判定し、車両の進行方向を判定するとともに、自車位置計算部21からの絶対位置情報及び運転操作検出センサ32からの運転操作情報を記憶する。
【0094】
また、安全制御処理部24(情報加工部24b)は、既に記憶されている制御用情報に対し、ライト制御部42用の加工処理を行う。具体的には、前述したコーナーRの算出処理等、前方道路情報の計算を行う。そして、加工処理後の制御用情報をライト制御部42へ出力する。さらに、車両が制御開始点及び制御終了点を通過したタイミングを通知する。
【0095】
ライト制御部42は、安全制御処理部24から入力した制御用情報及び制御開始点及び制御終了点の通過タイミングに従い、車両制御を行う。
このように、道路を2回目以降に走行する際には、制御用情報の記憶処理に加え、既に記憶されている制御用情報をライト制御部42へ出力する処理を行う。このとき、制御開始点及び制御終了点を毎回同一の条件で検出するため、車両制御のタイミングを正確に合わせることができる。
【0096】
[4.効果]
以上説明したように、本実施形態のナビゲーション装置10では、車両が交差点から退出した地点を車両制御の制御開始点として検出するとともに(S303)、車両が次の交差点に進入した地点を車両制御の制御終了点として検出する(S308)。そして、検出した制御開始点を始点とし制御終了点を終点とする絶対走行軌跡を、制御用情報として車両の進行方向別に記憶する(311)。そして、制御用情報が記憶されている道路を走行する際に、各車両制御部41〜44へ、その制御用情報を出力するとともに(S402)、車両が制御開始点及び制御終了点を通過したタイミングを通知する(S404,S408)。
【0097】
したがって、車両制御部41〜44においては、車両の絶対走行軌跡に基づき実際の道路の道路形状に合った車両制御が可能となるだけでなく、制御開始点及び制御終了点に基づき車両制御の開始タイミングを高い精度で特定することが可能となる。
【0098】
特に、本実施形態のナビゲーション装置10では、制御用情報を、車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力するようにしている。このため、記憶している制御用情報の中から各車両制御部41〜44において必要となる情報のみを送信することが可能となり、制御用情報の出力を効率よく行うことができる。
【0099】
また、本実施形態のナビゲーション装置10では、特徴物検出センサ31により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出する。このような構成によれば、例えば、交差点の横断歩道とは別の横断歩道が交差点の近傍に存在するような場合にも、交差点の横断歩道を高い精度で検出することができる。
【0100】
特に、本実施形態では、車両の後端部における上方位置から下方を撮影するように配置されたバックカメラを特徴物検出センサ31として用いているため、横断歩道や一時停止線等を車両が通過したタイミングを比較的正確に検出することができる。
【0101】
しかも、特徴物検出センサ31による特徴物の検出処理を、車両がその前方に存在する交差点の近傍に到達した時点で開始させるようにしているため、不要な検出処理を排除して検出処理を効率的に行うことができるとともに、誤検出を生じにくくすることができる。
【0102】
一方、本実施形態のナビゲーション装置10では、運転操作検出センサ32により検出された運転操作情報についても制御用情報として記憶する。したがって、車両制御部41〜44においては、車両の運転者による運転操作に基づく車両制御が可能となる。
【0103】
[5.特許請求の範囲との対応]
本実施形態のナビゲーション装置10では、自車位置検出処理(図5)におけるS101,S102の処理を実行することにより自車位置計算部21として機能する制御部20が、本発明の位置検出手段に相当する。
【0104】
また、地図データベース14から地図データを入力するマップマッチング処理部23として機能する制御部20が、本発明の地図取得手段に相当する。
また、道路情報記憶処理(図7)におけるS301,S302の処理を実行するとともに特徴物検出センサ31からの特徴物候補通知を入力することにより安全制御処理部24として機能する制御部20が、本発明の特徴物検出手段に相当する。
【0105】
また、道路情報記憶処理におけるS303,S308の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の制御点検出手段に相当する。
また、道路情報記憶処理におけるS311の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の情報記憶手段に相当する。
【0106】
また、道路情報通知処理(図13)におけるS402の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明の情報出力手段に相当する。
また、道路情報通知処理におけるS404の処理を実行することにより安全制御処理部24として機能する制御部20が、本発明のタイミング通知手段に相当する。
【0107】
[6.他の形態]
以上、本発明の一実施形態について説明したが、本発明は、種々の形態を採り得ることは言うまでもない。
【0108】
(1)上記実施形態では、交差点に存在する特徴物を検出するための特徴物検出センサ31としてバックカメラを用いているが、これに限定されるものではない。
例えば、車両の前方を撮影するフロントカメラを用いることも可能である。ただし、一般に、フロントカメラは真下の画像を撮影しないことから、道路標示を車両が通過するタイミングについては、道路標示までの距離及び車両の速度に基づき算出するとよい。なお、真下の画像を撮影可能なフロントカメラを用いれば、バックカメラと同様、車両が道路標示を通過したタイミングを比較的正確に検出することができる。
【0109】
また、特徴物検出センサ31は、特徴物の位置を検出することができるものであればよいため、カメラに限定されるものではなく、例えばレーダ(レーザレーダ、ミリ波レーダ等)を用いることも可能である。なお、前方はレーダ、下方はカメラというように、レーダとカメラを併用して特徴物を検出するようにしてもよい。
【0110】
(2)上記実施形態では、特徴物として、一時停止線や横断歩道を検出するようにしているが、これに限定されるものではない。
例えば、一時停止線や横断歩道以外の道路標示(道路の両端にある白線等)を検出するようにしてもよい。具体的には、図18(a)に示すように、車両がリンクL1からリンクL2へ走行する場合において、車両の左側の白線が途切れた地点を車両が交差点に進入した地点(制御終了点)として検出し、車両の左側の白線が再び現れた地点を車両が交差点から退出した地点(制御開始点)として検出する。このようにすれば、一時停止線や横断歩道の存在しない交差点についても制御開始点及び制御終了点を検出することができる。
【0111】
また、特徴物は、交差点であることが把握できるものであればよいため、道路標示に限定されるものではなく、例えば道路上又は道路近傍に配置された設置物(信号機や路側器等)とすることも可能である。
【0112】
例えば、歩行者用の信号機のポールを検出した地点を制御開始点又は制御終了点として検出するようにしてもよい。なお、ポールのみを検出する場合には、信号機以外のポールを信号機のポールとして検出することが考えられるため、信号機のポールであることを正確に検出するためには、ポール上部の信号機本体(灯器)を確認した上でポールを検出するとよい。
【0113】
また例えば、交差点に設置された路側器から無線通信により情報を入力した地点を制御開始点又は制御終了点として検出するようにしてもよい。
(3)上記実施形態では、あらかじめ決められた一種類の特徴物(制御開始点については横断歩道、制御終了点については一時停止線)を検出するようにしているが、これに限定されるものではなく、複数種類の特徴物を検出するようにしてもよい。
【0114】
また、地図データに基づき車両の前方に存在する交差点の種類(十字路、T字路、分岐点、合流点等)を判定し、交差点の種類に応じた特徴物を特徴物検出センサ31に検出させるようにしてもよい。例えば、交差点の種類が十字路の場合には特徴物として横断歩道を検出し、交差点の種類がT字路の場合には白線を検出するというように、検出対象の特徴点を変更する。このようにすれば、交差点に存在する可能性の高い特徴物を検出対象とすることができるため、特徴物の検出率を向上させることができる。
【0115】
(4)上記実施形態では、特徴物検出センサ31により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出するようにしているが、これに限定されるものではない。
【0116】
例えば、走行中の道路に対応するリンクが変化した直後に通過した特徴物(横断歩道)を制御開始点として検出し、走行中の道路に対応するリンクが切り替わる直前に通過した特徴物(一時停止線)を制御終了点として検出するようにしてもよい。
【0117】
また例えば、走行中の道路に対応するリンクが変化したタイミングに関係なく、特徴物検出センサ31により検出された特徴物を車両が通過した地点を、制御開始点及び制御終了点として検出するようにしてもよい。
【0118】
具体的には、上記実施形態の図12に示す処理に替えて、図19に示す処理が実行される。
すなわち、図19に示す処理においては、安全制御処理部24は、マップマッチング処理部23からのリンクIDがリンクLNからリンクL1に変化したタイミングに関係なく、特徴物検出センサ31から入力した特徴物候補通知(交差点)に基づき、特徴物候補通知に対応する特徴物の位置を、リンクL1についての制御開始点として判定する。
【0119】
同様に、安全制御処理部24は、マップマッチング処理部23からのリンクIDがリンクL1からリンクL2に変化したタイミングに関係なく、特徴物検出センサ31から入力した特徴物候補通知(一時停止線)に基づき、特徴物候補通知に対応する特徴点の位置を、リンクL1についての制御終了点として判定する。
【0120】
以上のように、マップマッチングの精度が低くリンクIDの変化のタイミングにばらつきが生じるような場合でも、特徴物検出センサ31による特徴物の検出精度が高ければ、特徴物検出センサ31の検出結果を優先することで、制御開始点及び制御終了点を精度よく検出することができる。
【0121】
(5)上記実施形態では、特徴物検出センサ31により検出された特徴物に基づき制御開始点及び制御終了点を検出するようにしているが、これに限定されるものではなく、特徴物検出センサ31を用いずに制御開始点及び制御終了点を検出することも可能である。
【0122】
例えば、走行中の道路に対応するリンクが変化した地点を制御開始点及び制御終了点として検出するようにしてもよい。
また例えば、車両のステアリング角度の変化が所定の条件を満たした地点を制御開始点及び制御終了点として検出するようにしてもよい。具体的には、ステアリング角度に基づき交差点を曲がろうとする操作が行われたと判定した場合にその地点を制御終了点として検出し、その後にハンドルを戻す操作が行われたと判定した場合にその地点を制御開始点として検出する。また、車両が交差点を通過するにもかかわらす交差点を曲がろうとする操作が行われないと判定した場合にはその地点を制御終了点及び制御開始点として検出する。このように、ステアリング角度の変化に基づき制御開始点及び制御終了点を検出することが可能である。
【0123】
(6)上記実施形態では、実際の道路における各交差点の中央位置に設定されたノードと、ノード間を接続するリンクとにより道路が表された地図データを想定しているが(図2)、地図データとしては、1つの交差点に対して複数のノードが設定された道路が含まれているものも考えられる。すなわち、図18(b)に示すように、例えば中央分離帯を有する道路においてその中央分離帯を挟んで2本のリンクが割り当てられている場合である。この場合、十字路においては4つのノードが設定され、各ノード間を接続する部分がそれぞれリンクとなる。したがって、車両がリンクL1からリンクL4へ走行する間に、リンクがL1→L2→L3→L4と3回変化する。そこで、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つ(例えば最初の変化)のみをリンクが変化した地点とみなすとよい。具体的には、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定する。このようにすれば、複数のノードが設定された交差点においても、リンクが変化した地点を1つに特定することができる。この結果、制御開始点及び制御終了点を正常に検出することができる。
【0124】
(7)上記実施形態では、絶対走行軌跡全域についての運転操作情報を制御用情報として記憶するようにしているが、これに限定されるものではなく、例えば、カーブ路等の特定の区間でのみ記憶するようにしてもよい。また、運転操作情報自体を制御用情報として記憶しない構成とすることも可能である。
【0125】
(8)上記実施形態では、制御用情報をリンク単位(交差点から次の交差点までの道路単位)で記憶するようにしているが、これに限定されるものではなく、複数のリンクを1単位として制御用情報を記憶するようにしてもよい。具体的には、例えば、国道等のように複数車線からなる大きな道路と、一車線しかない小さな道路とが交わっている場合には、各交差点ごとに制御用情報を区切るよりも、大きな道路同士が交わる交差点で区切った方が好ましいと考えられる。そこで、このような道路については、複数のリンクを1単位とすることで、道路に適した制御用情報を記憶することができる。
【0126】
(9)上記実施形態では、制御用情報を、各車両制御部41〜44へ、各車両制御部41〜44に応じた情報の加工処理を行った上で出力するようにしているが、これに限定されるものではなく、制御用情報をそのまま出力する構成とすることも可能である。
【0127】
(10)上記実施形態では、制御開始点を始点としかつ制御終了点を終点とする絶対走行軌跡を記憶するようにしているが、これに限定されるものではない。例えば、制御開始点よりも前の地点を始点とし、制御終了点よりも後の地点を終点とする絶対走行軌跡を記憶し、制御開始点及び制御終了点を別途記憶する構成とすることも可能である。
【0128】
(11)上記実施形態では、本発明の制御用情報記憶装置をナビゲーション装置10に適用した例について説明したが、これに限定されるものではなく、ナビゲーション装置とは別の装置として構成することも可能である。
【図面の簡単な説明】
【0129】
【図1】実施形態のナビゲーション装置の概略構成を示すブロック図である。
【図2】地図データに記憶されている道路の説明図である。
【図3】十字路における特徴点検出の説明図である。
【図4】制御用情報通知処理のフローチャートである。
【図5】自車位置検出処理のフローチャートである。
【図6】走行道路特定処理のフローチャートである。
【図7】道路情報記憶処理のフローチャートである。
【図8】記憶部に記憶される制御用情報の説明図である。
【図9】進行方向ごとの走行軌跡を説明するための説明図である。
【図10】進行方向の判定手法についての説明図である。
【図11】道路情報記憶処理により実現される処理を説明するための説明図である。
【図12】道路情報記憶処理に対応するタイムチャートである。
【図13】道路情報通知処理のフローチャートである。
【図14】制御用情報の加工処理を表す説明図である。
【図15】平均勾配及びコーナーRの算出方法を説明する説明図である。
【図16】道路情報通知処理に対応するタイムチャートである。
【図17】ナビゲーション装置により実行される処理に対応するタイムチャートである。
【図18】交差点における特徴点検出の説明図である。
【図19】特徴物検出センサの検出結果を優先した処理に対応するタイムチャートである。
【符号の説明】
【0130】
10…ナビゲーション装置、11…GPSセンサ、12…方位センサ、13…距離センサ、14…地図データベース、20…制御部、21…自車位置計算部、22…走行軌跡メモリ、23…マップマッチング処理部、24…安全制御処理部、24a…記憶部、24b…情報加工部、31…特徴物検出センサ、32…運転操作検出センサ、41…低燃費制御部、42…ライト制御部、43…ACC制御部、44…先読み制御部
【特許請求の範囲】
【請求項1】
車両の現在位置を検出する位置検出手段と、
前記位置検出手段により検出された現在位置に基づく車両の走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する情報記憶手段と、
を備えた制御用情報記憶装置において、
車両が交差点から退出した地点を前記車両制御の制御開始点として検出する制御点検出手段を備え、
前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を前記制御用情報として記憶すること
を特徴とする制御用情報記憶装置。
【請求項2】
前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を始点とする走行軌跡を記憶すること
を特徴とする請求項1に記載の制御用情報記憶装置。
【請求項3】
前記情報記憶手段により記憶されている前記制御用情報を外部へ出力する情報出力手段を備えたこと
を特徴とする請求項1又は請求項2に記載の制御用情報記憶装置。
【請求項4】
前記情報出力手段は、前記制御用情報を、車両制御を行う車両制御手段へ出力すること
を特徴とする請求項3に記載の制御用情報記憶装置。
【請求項5】
前記情報記憶手段により走行軌跡が記憶されている道路に車両が進入したタイミングとして、前記制御点検出手段により検出された前記制御開始点を車両が通過したタイミングを前記車両制御手段へ通知するタイミング通知手段を備えたこと
を特徴とする請求項4に記載の制御用情報記憶装置。
【請求項6】
前記情報出力手段は、前記制御用情報を、情報の加工処理を行った上で前記車両制御手段へ出力すること
を特徴とする請求項5に記載の制御用情報記憶装置。
【請求項7】
前記情報出力手段は、前記制御用情報を、複数種類の車両制御手段へ、各車両制御手段に応じた情報の加工処理を行った上で出力すること
を特徴とする請求項6に記載の制御用情報記憶装置。
【請求項8】
前記制御点検出手段は、車両のステアリング角度の変化が所定の条件を満たした地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項9】
交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する地図取得手段を備え、
前記制御点検出手段は、車両が走行中の道路に対応するリンクが変化した地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項10】
道路に存在する特徴物を検出する特徴物検出手段と、
交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する地図取得手段と、
を備え、
前記制御点検出手段は、前記特徴物検出手段により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項11】
道路に存在する特徴物を検出する特徴物検出手段を備え、
前記制御点検出手段は、前記特徴物検出手段により検出された特徴物を車両が通過した地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項12】
前記特徴物検出手段は、交差点であることが把握できるものを前記特徴物として検出すること
を特徴とする請求項10又は請求項11に記載の制御用情報記憶装置。
【請求項13】
前記特徴物検出手段は、車両がその前方に存在する交差点の近傍に到達した時点で、特徴物の検出を開始すること
を特徴とする請求項10から請求項12までのいずれか1項に記載の制御用情報記憶装置。
【請求項14】
前記特徴物検出手段は、車両の前方に存在する交差点の種類に応じた特徴物を検出すること
を特徴とする請求項13に記載の制御用情報記憶装置。
【請求項15】
前記地図データには、1つの交差点に対して複数のノードが設定された道路が含まれており、
前記制御点検出手段は、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つのみをリンクが変化した地点とみなすこと
を特徴とする請求項9又は請求項10に記載の制御用情報記憶装置。
【請求項16】
前記制御点検出手段は、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定すること
を特徴とする請求項15に記載の制御用情報記憶装置。
【請求項17】
前記情報記憶手段は、同一の道路について車両の進行方向別に前記制御用情報を記憶すること
を特徴とする請求項1から請求項16までのいずれか1項に記載の制御用情報記憶装置。
【請求項18】
前記情報記憶手段は、車両の運転者による運転操作を前記制御用情報として記憶すること
を特徴とする請求項1から請求項17までのいずれか1項に記載の制御用情報記憶装置。
【請求項19】
前記制御点検出手段は、車両が交差点に進入した地点を前記車両制御の制御終了点として検出し、
前記情報記憶手段は、前記制御点検出手段により検出された前記制御終了点を前記制御用情報として記憶すること
を特徴とする請求項1から請求項18までのいずれか1項に記載の制御用情報記憶装置。
【請求項20】
前記情報記憶手段は、前記制御点検出手段により検出された前記制御終了点を終点とする走行軌跡を記憶すること
を特徴とする請求項19に記載の制御用情報記憶装置。
【請求項21】
請求項1から請求項20までのいずれか1項に記載の制御用情報記憶装置が備える前記各手段としてコンピュータを機能させることを特徴とするプログラム。
【請求項1】
車両の現在位置を検出する位置検出手段と、
前記位置検出手段により検出された現在位置に基づく車両の走行軌跡を、交差点の退出路で行われる車両制御に利用するための制御用情報として記憶する情報記憶手段と、
を備えた制御用情報記憶装置において、
車両が交差点から退出した地点を前記車両制御の制御開始点として検出する制御点検出手段を備え、
前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を前記制御用情報として記憶すること
を特徴とする制御用情報記憶装置。
【請求項2】
前記情報記憶手段は、前記制御点検出手段により検出された前記制御開始点を始点とする走行軌跡を記憶すること
を特徴とする請求項1に記載の制御用情報記憶装置。
【請求項3】
前記情報記憶手段により記憶されている前記制御用情報を外部へ出力する情報出力手段を備えたこと
を特徴とする請求項1又は請求項2に記載の制御用情報記憶装置。
【請求項4】
前記情報出力手段は、前記制御用情報を、車両制御を行う車両制御手段へ出力すること
を特徴とする請求項3に記載の制御用情報記憶装置。
【請求項5】
前記情報記憶手段により走行軌跡が記憶されている道路に車両が進入したタイミングとして、前記制御点検出手段により検出された前記制御開始点を車両が通過したタイミングを前記車両制御手段へ通知するタイミング通知手段を備えたこと
を特徴とする請求項4に記載の制御用情報記憶装置。
【請求項6】
前記情報出力手段は、前記制御用情報を、情報の加工処理を行った上で前記車両制御手段へ出力すること
を特徴とする請求項5に記載の制御用情報記憶装置。
【請求項7】
前記情報出力手段は、前記制御用情報を、複数種類の車両制御手段へ、各車両制御手段に応じた情報の加工処理を行った上で出力すること
を特徴とする請求項6に記載の制御用情報記憶装置。
【請求項8】
前記制御点検出手段は、車両のステアリング角度の変化が所定の条件を満たした地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項9】
交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する地図取得手段を備え、
前記制御点検出手段は、車両が走行中の道路に対応するリンクが変化した地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項10】
道路に存在する特徴物を検出する特徴物検出手段と、
交差点に設定されたノード及びノード間を接続するリンクにより道路を表す地図データを取得する地図取得手段と、
を備え、
前記制御点検出手段は、前記特徴物検出手段により検出された特徴物のうち、車両が走行中の道路に対応するリンクが変化した地点に最も近い特徴物を車両が通過した地点を、前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項11】
道路に存在する特徴物を検出する特徴物検出手段を備え、
前記制御点検出手段は、前記特徴物検出手段により検出された特徴物を車両が通過した地点を前記制御開始点として検出すること
を特徴とする請求項1から請求項7までのいずれか1項に記載の制御用情報記憶装置。
【請求項12】
前記特徴物検出手段は、交差点であることが把握できるものを前記特徴物として検出すること
を特徴とする請求項10又は請求項11に記載の制御用情報記憶装置。
【請求項13】
前記特徴物検出手段は、車両がその前方に存在する交差点の近傍に到達した時点で、特徴物の検出を開始すること
を特徴とする請求項10から請求項12までのいずれか1項に記載の制御用情報記憶装置。
【請求項14】
前記特徴物検出手段は、車両の前方に存在する交差点の種類に応じた特徴物を検出すること
を特徴とする請求項13に記載の制御用情報記憶装置。
【請求項15】
前記地図データには、1つの交差点に対して複数のノードが設定された道路が含まれており、
前記制御点検出手段は、同一の交差点でリンクが複数回変化したと判定した場合には、そのうちの1つのみをリンクが変化した地点とみなすこと
を特徴とする請求項9又は請求項10に記載の制御用情報記憶装置。
【請求項16】
前記制御点検出手段は、リンクが変化してから次にリンクが変化するまでの時間又は走行距離が設定値以下である場合に、同一の交差点でリンクが複数回変化したと判定すること
を特徴とする請求項15に記載の制御用情報記憶装置。
【請求項17】
前記情報記憶手段は、同一の道路について車両の進行方向別に前記制御用情報を記憶すること
を特徴とする請求項1から請求項16までのいずれか1項に記載の制御用情報記憶装置。
【請求項18】
前記情報記憶手段は、車両の運転者による運転操作を前記制御用情報として記憶すること
を特徴とする請求項1から請求項17までのいずれか1項に記載の制御用情報記憶装置。
【請求項19】
前記制御点検出手段は、車両が交差点に進入した地点を前記車両制御の制御終了点として検出し、
前記情報記憶手段は、前記制御点検出手段により検出された前記制御終了点を前記制御用情報として記憶すること
を特徴とする請求項1から請求項18までのいずれか1項に記載の制御用情報記憶装置。
【請求項20】
前記情報記憶手段は、前記制御点検出手段により検出された前記制御終了点を終点とする走行軌跡を記憶すること
を特徴とする請求項19に記載の制御用情報記憶装置。
【請求項21】
請求項1から請求項20までのいずれか1項に記載の制御用情報記憶装置が備える前記各手段としてコンピュータを機能させることを特徴とするプログラム。
【図1】



【図2】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】

【図13】
【図14】
【図15】
【図16】

【図17】
【図19】
【図3】

【図18】

【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図19】
【図3】
【図18】
【公開番号】特開2008−9870(P2008−9870A)
【公開日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願番号】特願2006−181651(P2006−181651)
【出願日】平成18年6月30日(2006.6.30)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願日】平成18年6月30日(2006.6.30)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]