
Fターム[2F129BB50]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | マップマッチング (2,282) | パターンマッチング (131)
Fターム[2F129BB50]に分類される特許
1 - 20 / 131
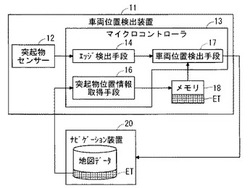
車両位置検出装置
【課題】本発明は、簡単な構成で精度良く車両の位置を検出する車両位置検出装置の提供を目的とする。
【解決手段】本発明の車両位置検出装置は、GPS電波による自車位置の測定を補助するための車両位置検出装置であって、車両に設置され、当該車両の上方における地物を感知する突起物センサー12と、道路上方の地物についての予めの調査結果に基づく情報を位置情報と紐付けた突起物位置情報を取得する突起物位置情報取得手段16と、突起物センサー12の感知結果と突起物位置情報との比較に基づき、車両の位置を検出する車両位置検出手段17と、を備える。
(もっと読む)
ナビゲーションシステム、端末装置

【課題】処理時間を抑制しながら適切な誘導経路を探索することができるナビゲーションシステムおよび端末装置を提案する。
【解決手段】地図データに通過頻度が高い地点についての情報を登録しておき、その地点の中から経由地を選択する。そして、選択された経由地を経由する出発地から目的地までの誘導経路を探索する。地点の通過頻度は、予め経路探索することによって得られた経路に含まれる回数および/または車両の走行履歴に基づいて設定する。
(もっと読む)
自車位置認識システム、自車位置認識プログラム、及び自車位置認識方法
【課題】画像認識処理における認識対象を決定するための地物の認識率を、当該地物の撮影時の自車両の速度を考慮して決定することが可能な技術を実現する。
【解決手段】道路情報RDを取得する道路情報取得部23bと、地物が配置された道路区間である地物配置区間に推定自車位置EPが進入する前に、少なくとも道路情報RDに基づいて、地物配置区間内での自車両の速度推移の予測を示す予測速度推移を決定する予測速度推移決定部27と、地物情報FTと予測速度推移とに基づいて、地物配置区間に含まれる地物の画像認識に成功する割合である認識率を決定する認識率決定部26と、画像認識処理において認識対象とする地物を認識率に基づき決定する認識対象決定部25と、を備える。
(もっと読む)
評価表示システム、方法およびプログラム
【課題】今回の走行区間における燃費の評価と過去の燃費の評価とを運転中に容易に比較することが可能な技術の提供。
【解決手段】表示部に車両の現在位置とともに当該現在位置の周辺の地図を表示し、前記車両の今回の走行における燃費の評価を単位区間毎に示す今回評価を取得し、前記今回の走行よりも過去における前記車両の燃費の評価を前記単位区間毎に示す過去評価を取得し、前記地図上に前記単位区間毎の前記今回評価と前記過去評価とを併せて表示する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が走行する道路の車線数から車両が走行中の道路で行うことができる最大の車線変更回数を特定し(S52)、特定された最大の車線変更回数に基づいて車両の検出位置の誤差範囲を推定する(S53)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の位置を正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点を直進して通過する場合に、バックカメラ19で撮像した画像に基づいて車両が走行する道路上に存在する地物を検出し(S13)、検出された地物の配置パターンである検出配置パターンが、分岐点へ進入する進入道路上に設けられた地物の配置パターンである進入側配置パターンと一致する場合に、分岐点の周辺に設けられた地物又は分岐点のノードとの相対位置によって移動体の位置を特定する(S18、S19)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両の走行距離を検出する為の車速センサ22の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定する(S41〜S43)とともに、車両の方位変化を検出する為のジャイロセンサ24の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定し(S44〜S46)、特定された方向に基づいて車両の検出位置の誤差範囲を推定する(S47)ように構成する。
(もっと読む)
位置軌跡データ処理装置、及び、そのプログラム
【課題】移動体車両同士の無線通信でデータ交換することにより、地図を生成及び/または更新できる位置軌跡データ処理装置を提供する。
【解決手段】自移動体1の地球上の位置を検出して位置データを出力する位置検出部20と、複数の位置データを含む位置軌跡データを記憶する記憶部60と、他の移動体2から当該他の移動体2等の一次位置軌跡データを受信する通信部80と、位置検出部20から出力された位置データに基づき自移動体1の一次位置軌跡データを記憶部60に記憶する機能と、通信部80によって他の移動体2等から受信した一次位置軌跡データに基づく二次位置軌跡データを記憶部60に記憶する機能と、記憶部60に記憶された二次位置軌跡データに基づき報知データを生成する機能とを備える制御部40とを有する。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】参照データの取得に要する通信コストの増大を抑制しつつ、必要な参照データを確実に取得することができる、参照データ取得装置を提供すること。
【解決手段】参照データ取得装置50は、車両2の現在位置から所定範囲内に存在するマッチング地点を含む施設を特定するマッチング地点特定部51aと、マッチング地点特定部51aにより特定された施設における通信状態を特定する通信状態特定部51bと、通信状態特定部51bにより特定された通信状態が良好な施設については、当該施設への進入路に存在するマッチング地点に対応する参照データのみを当該施設への進入前に取得し、通信状態が良好ではない施設については、当該施設への進入路に存在するマッチング地点に対応する参照データと、当該施設からの退出路に存在するマッチング地点に対応する参照データとを当該施設への進入前に取得する、参照データ取得部51cとを備える。
(もっと読む)
運転支援システム、方法およびプログラム
【課題】交差点が連続する道路において後の交差点に関する案内を適切に実行する技術の提供。
【解決手段】第1交差点と2交差点との間の距離を交差点間距離として取得し、前記第2交差点に関する案内を実行するために前記第2交差点以前にて確保すべき距離を必要距離として取得し、前記第1交差点に到達する前に前記車両に搭載された検出手段によって複数の地物の中の少なくとも1個が検出された場合に前記複数の地物の中のいずれかの地物を基準地物とし、当該基準地物からの走行距離によって前記車両の現在位置を特定し、前記検出手段によって検出された地物の個数に応じた前記基準地物からの走行距離の誤差を誤差距離として取得し、前記交差点間距離が前記必要距離と前記誤差距離との和以上であり、かつ、前記誤差距離に基づいて前記車両が前記第1交差点を通過したと判断される場合に、前記第2交差点に関する案内を実行する。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】誤認識となりうる参照データを用いてマッチングを行うことを防止しつつ、車両が進入する可能性のある地点については参照データを用いて漏れなくマッチングを行うことを可能とする、参照データ取得装置を提供すること。
【解決手段】参照データ取得装置50は、参照データと撮影画像とのマッチングが行われる可能性のあるマッチング地点の内、車両2の現在位置から所定範囲内に存在するマッチング地点を特定するマッチング地点特定部51aと、マッチング地点特定部51aにより特定されたマッチング地点への当該車両2の進入方向を特定する進入方向特定部51bと、車両2の現在位置から所定範囲内に存在するマッチング地点の内、当該マッチング地点への当該車両2の進入方向と当該車両2の進行方向との角度差が所定値以上のマッチング地点に対応する参照データを取得する参照データ取得部51cとを備える。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】右左折後の移動体の位置を迅速且つ正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で右左折したことを検出した場合に、高精度ロケーションシステムによって横断歩道を認識したか否か判定し(S14)、横断歩道を認識した場合に、対向車線の停止線の位置に基づいて右左折後の車両の詳細な現在位置を検出(又は既に検出された位置を補正)する(S15)ように構成する。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】参照データの取得に要する通信コストの増大を抑制しつつ、撮影画像に影響を与える周辺環境に対応する適切な参照データを取得することができる、参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラムを提供すること。
【解決手段】参照データ取得装置60は、車両2の周辺を撮影した撮影画像のマッチングに用いる参照データを取得するための参照データ取得装置60であって、車両2の走行予定経路を特定し、当該特定した走行予定経路において撮影画像と参照データとのマッチングを行う可能性のあるマッチング地点を特定するマッチング地点特定部61aと、撮影画像に影響を与える周辺環境をマッチング地点毎に特定し、当該特定した周辺環境に対応する参照データを当該マッチング地点毎に取得する参照データ取得部61bとを備える。
(もっと読む)
運転支援装置および運転支援方法
【課題】マッチング状態ではない場合にも運転支援を開始可能にする技術の提供。
【解決手段】車両が存在する道路区間に相当するリンクであるマッチングリンクを特定するマップマッチング処理において所定の基準以上の信頼度で前記マッチングリンクが特定されたマッチング状態であるか否かを判定し、前記車両の現在位置を検出し、前記マッチング状態ではない場合に、前記現在位置に最も近い道路区間に相当するリンクを候補リンクとして特定する候補リンクを特定し、判定対象となる対象ノードに複数のリンクが接続されているとともに、前記候補リンクが前記複数のリンクのうちの一つのリンクから他のリンクに変化した場合に、前記対象ノードが示す位置を前記車両が通過したと判定し、前記対象ノードが示す位置を前記車両が通過したと判定された場合に、前記対象ノードが示す位置を前記車両が通過した後の運転支援として予め決められた運転支援を実行する。
(もっと読む)
情報表示装置及び情報表示プログラム
【課題】現在位置に関連する複数カテゴリの情報をユーザに提供する際の利便性を向上させる。
【解決手段】情報表示装置は、現在位置に応じた現在位置情報を取得する現在位置情報取得部と、現在位置情報に基づいて、現在位置に関連する所定カテゴリの提供情報を所定の表示部上に表示するための表示情報を生成する複数の情報提供部と、複数の表示情報が表示部上に表示されるように、複数の情報提供部を制御する制御部と、を備える。
(もっと読む)
静止物地図生成装置
【課題】走行中の移動体の絶対位置の実時間測定に有用な、道路周辺の静止物に関する高精度な測位データを簡単に収集することが可能な装置を低コストで実現すること。
【解決手段】この静止物地図生成装置100は、自車両周辺における物体の同一時刻における相対位置の平面分布を表すローカルマップを生成するローカルマップ生成手段130と、移動物が検出される可能性が高い検出領域から検出された物体の上記の相対位置の位置データの重みをその可能性に対して単調に減少させる重み付け手段140と、異時刻に生成された同一地点周辺の複数のローカルマップを照合するローカルマップ照合手段150と、このローカルマップ照合手段によって対応づけられる同一地点について、上記の絶対位置取得装置の出力情報に基づいて算定される異時刻の複数の当該絶対位置を平均化処理する平均処理手段160などを有して成る。
(もっと読む)
車両情報取得装置、車両情報取得方法及びプログラム
【課題】車両の自車位置情報を高精度に取得できると共に処理負荷の軽減化を図ることが可能となる車両情報取得装置、車両情報取得方法及びプログラムを提供する。
【解決手段】自車両後方を撮像する撮像手段と、自車両の進行方位と速度を取得する取得手段と、前記撮像手段によって撮像された画像内から特徴点を抽出する抽出手段と、前記撮像手段によって撮像される画像内における前記特徴点の推定位置を前記進行方位と速度に基づいて算出し、当該特徴点が前記撮像手段によって撮像された後に撮像された画像内の前記推定位置に撮像されているか否かを判定する判定手段と、当該特徴点が前記推定位置に撮像されていないと判定した場合には、前記撮像手段によって撮像された画像内と前記撮像手段によって撮像された後に撮像された画像内の前記特徴点の移動位置及び形状に基づいて自車位置情報を取得する自車位置情報取得手段と、を備える。
(もっと読む)
鉄道車両の位置検出装置および位置検出方法
【課題】駅構内のように分岐線の間隔が狭くしかもGPS計測機の精度が低い場合でも、どの分岐線に入ったかを精度良く検出し得る鉄道車両の位置検出装置を提供する。
【解決手段】GPS計測機33により求められた保全車両Hの概略位置を入力すると共に移動距離を算出する距離算出部21と、データ取得部22で取得された保全車両Hの角速度ω及び角加速度ω´を入力して進行方向をファジィ推論により推定する進行方向推定部23と、距離算出部21で算出された移動距離及びGPS計測機33により求められた概略位置を入力し且つ進行方向推定部23から進行方向を入力して分岐点を推定する分岐点推定部25と、データ取得部22で求められた変位角θ及び進行方向推定部23で推定された進行方向を入力して分岐角を検出すると共に当該分岐角に対応する分岐線番を出力する分岐角検出部26とを具備したもの。
(もっと読む)
経路案内装置、経路案内プログラム、及び経路案内方法
【課題】自位置が経路案内地点に到達するまでに、音声による経路案内を完了できる経路案内装置を提供する。
【解決手段】案内地点に関する同趣旨の経路案内のための案内音声であって発音時間が段階的に異なる複数種類の案内音声を生成可能に構成され、案内地点に関する経路案内を行うに際して、判定された推定到達時間以内で発音時間が最も長い案内音声を生成する案内音声生成部35を備えた経路案内装置1。
(もっと読む)
1 - 20 / 131
[ Back to top ]