
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
121 - 140 / 186
レーダ情報処理装置
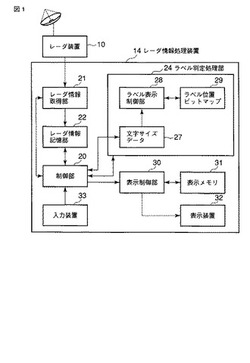
【課題】複数の航空機に対する情報ラベルをレーダ画面中に表示する場合であっても、情報ラベル中の情報を常に確認しやすい状態にする。
【解決手段】レーダ情報処理装置14の制御部20は、入力装置33から入力される指示に応じて、情報ラベルにおける文字の文字サイズを設定する。ラベル表示制御部28は、設定された文字サイズに応じて、情報ラベルの表示画面中におけるサイズを設定し、この設定された複数の情報ラベルが表示画面中で重なるか否かを判定する。ラベル表示制御部28は、情報ラベルが重なると判定された場合に、情報ラベルの位置を所定の条件に従って重なりを回避することができるように変更して制御部20に通知する。制御部20は、変更された位置に情報ラベルをレーダ画面に表示させる。
(もっと読む)
ナビゲーション装置及び地図のスクロール表示方法

【課題】スクロール表示を行う際に地図上の複数の地点間の距離を容易に把握できる「ナビゲーション装置及び地図表示方法」を提供する。
【解決手段】カーソル移動操作が発生した場合には、地図画像201の表示範囲を、カーソル移動操作を受け付けた方向に、予め定めたスクロール単位距離移動するように変更する。カーソル移動操作が所定期間以上発生しなかった場合には、カーソル位置を中心(交差位置)とする十字形状を有し、十字形状の各腕部にカーソル210を始点とする距離を示す目盛を設けたスケール図形601を表示する。また、主要施設について施設の名称と施設の位置のカーソル210の位置からの距離を表した施設情報602を、施設位置に対応する地図画像201上の位置に表示する。
(もっと読む)
路面標示認識システム
【課題】所定の基準を満たした状態を有する路面標示のみを撮像手段により撮像した画像に基づいて検出することによって、処理負荷の軽減を可能とした路面標示認識システムを提供する。
【解決手段】車両2から所定範囲内に検出対象となるカスレパターンに分類された路面標示が存在すると判定された場合(S2:YES)に、後方カメラ3によって撮像された画像から路面標示を認識する(S5)とともに、車両2から認識された路面標示に関連付けられた制御対象物までの距離を算出し(S7〜S10)、制御対象物までの距離が所定距離となったと判定された場合(S11:YES)に、関連付けられた制御対象物の種類に応じた走行の案内又は車両の制御を行う(S14)ように構成する。
(もっと読む)
車両制御装置
【課題】 本線道路と速度差のある道路が接続された合流路又は退出路において運転支援制御を行う際に、精度の高い制御区間を設定すること。
【解決手段】 本発明は、本線道路と速度差のある道路が接続された合流路又は退出路において運転支援制御を行う車両制御装置において、本線道路と合流路又は退出路を区分ける道路上に描かれた破線を検出する破線検出手段を備え、前記破線検出手段の破線検出結果に基づいて、運転支援制御の制御区間を決定することを特徴とする。例えば、前記破線検出手段により本線道路と退出路を区分ける破線が検出され、且つ、アクセルペダルの踏み込みが解除された場合に運転支援制御が開始される。
(もっと読む)
車両用運転支援装置
【課題】 運転支援制御が不必要に継続されることを適切に防止すること。
【解決手段】 自車位置検出手段と、進行方向前方の注意地点を検出する注意地点検出手段と、車両の走行状態を検出する走行状態検出手段と、前記検出された自車位置と注意地点の位置との距離を演算する距離演算手段と、前記検出された走行状態及び前記演算された距離に基づいて、運転支援制御を行う運転支援手段と、前記検出された走行状態に基づいて、注意地点に至る走行経路からの逸脱を予測する逸脱予測手段と、前記逸脱予測手段により前記逸脱が予測された場合に、前記運転支援手段による運転支援制御を中止することを特徴とする。
(もっと読む)
地図表示装置、地図表示方法、地図表示プログラム、及びそのプログラムを記録した記録媒体
【課題】 表示範囲を広範囲に変更しつつ、自車両近傍の表示内容の視認性を良好に保つこと。
【解決手段】 標準の視野角度(45°)から広角の視野角度(90°)の三次元道路地図となるように、画面の横方向の視野角度の大きさを変更する際、自車両の現在位置PPを通る基準線を中心として視野角度の大きさを変更する。
(もっと読む)
車両位置取得管理システム
【課題】安価な構成のシステムで車両の正確な位置を取得できるようにすると共に、端末に大きな負荷をかけることなく車両の位置を地図上に正確に表示できるようにする。
【解決手段】GPS衛星からの電波に基づく測位精度が低下する区間において、無線タグ6から車載装置の無線タグリーダで受信した位置情報と車載装置2のGPS測位機が測位した測位情報をサーバ8が受信したとき、サーバの主制御部がその位置情報と測位情報との差分を算出すると共にずれの方向を検出して前記記憶部に記憶し、次の無線タグ6の位置情報を前記無線タグリーダが受信するまで、前記GPS測位機が測位した測位情報に対して前記差分情報とずれの方向により前記車両の位置を補正して、その補正した位置を道路上の車両の位置情報として前記記憶手部に記憶させるようにした。
(もっと読む)
ナビゲーション装置、および旅行時間補正方法
【課題】 リンクごとの旅行時間を精度高く算出すること。
【解決手段】 データ補正部107bは、交通情報取得装置104で取得した交通情報に基づいて、各リンクの平均車速情報の補正が必要か否かを判断し、補正が必要であると判断した場合には、補正処理を実行する。旅行時間算出部107cは、データ補正部107bによる補正結果に基づいて、各リンクのリンク旅行時間を算出して、設定された目的地までの推定旅行時間を算出する。旅行時間表示部107dは、算出された推定旅行時間をモニタ108に表示する。
(もっと読む)
方位及び傾斜角検出装置、方位及び傾斜角検出方法、プログラム及び携帯端末装置
【課題】地磁気成分や重力成分を検出して方位及び傾斜角の情報を検出するにあたって、重力成分に含まれる誤差の影響を抑える。
【解決手段】測定データ取り込み手段702は加速度センサや磁気センサから測定データg,hを取り込む。第1の演算手段703は測定データg,hから方位角α0や仰角β0、地磁気伏角θ0を算出する。平均化手段704は地磁気伏角θ0を蓄積し平均値をとって地磁気伏角θとする。第2の演算手段705は測定データhと地磁気伏角θとから方位角αや仰角βを算出する。複数の解が存在する場合、それぞれの解を候補値(α1,β1)(α2,β2)とする。選択手段706は上記の値α0,β0を参考値とし、候補値(α1,β1)(α2,β2)から検出値(α,β)を選択する。
(もっと読む)
位置補正方法及びナビゲーション装置
【課題】 GPS等によって推定した自動車の鉛直方向の位置を精度良く補正することができる位置補正方法、及びナビゲーション装置を提供する。
【解決手段】 ナビゲーション装置1は、自動車(移動体)が受ける重力加速度の進行方向の成分を重力センサ13で測定し、測定した成分の大きさ及び向きにより、自動車が進行する向きの傾斜角を求め、各瞬間での傾斜角及び車速パルスから、自動車が移動することによる鉛直方向への変位量を求める。ナビゲーション装置1は、求めた鉛直方向への変位量に基づいて、GPSにより推定した自動車の鉛直方向の推定位置を補正し、更に鉛直方向の情報を含む地図データを用いてマップマッチングを行うことにより、自動車の推定位置を精度良く補正する。
(もっと読む)
自車位置算出装置およびその算出方法
【課題】 走行中にナビゲーション装置がリセットされた場合であっても、自車位置の算出を精度良く行うことができる「自車位置算出装置およびその算出方法」を提供する。
【解決手段】 車両の走行距離に応じて生成されるパスル信号に基づき自車位置を算出する自車位置算出方法は、パルス信号を積算し、積算されたパルス数に応じた走行距離情報を一定の周期で送信するステップ(S103)と、送信された走行距離情報の差分に基づき移動距離を算出するステップ(ステップS104)と、自車の運動特性から移動距離が異常であるか否かを判定するステップ(ステップS105)と、異常であると判定されたとき、算出された移動距離を補正するステップ(S106)と、補正された移動距離に基づき自車位置の算出・更新を行うステップ(S108)とを有する。
(もっと読む)
現在位置算出装置
【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
駐車違反容疑車両摘発システム
【課題】駐車違反の摘発には、余りにも処理時間と労力が掛かりすぎていて、現場の努力も空しく、駐車違反の撲滅には程遠いのが現実で、事故の誘発や交通渋滞を起こし続けている。
【解決手段】駐車違反の摘発方法に、駐車開始後の時間経過についての証明方法に即断性を持たせる手段として、車の対応部位の温度計測をして、駐車中の車両温度により駐車違反容疑を割り出す手法により、即駐車違反として摘発を可能にする。
(もっと読む)
カーナビゲーション装置
【課題】 カーナビゲーション装置において、一般道路上に高架式の高速道路が構築されて2本の道路が上下二段に並行する場合、その2本の道路の状況を確認できるようにする。
【解決手段】 表示画面に表示されている3つの表示形態のうち高速道路優先を選択すると、一般道路L2が消去されて高速道路L1だけが表示され、一般道路優先を選択すると、高速道路L1が消去されて一般道路L2だけが表示される。
(もっと読む)
車両制御装置
【課題】 道路外の危険度に応じて車線の逸脱防止を図る車両制御装置を提供すること。
【解決手段】 車両の位置を推定する車両位置推定手段と、車両位置推定手段により推定された車両位置の走行方向前方の道路外の状況を検出する道路外状況検出手段と、走行車線に対する車両位置を検出する走行位置検出手段と、走行位置検出手段により検出された走行車線からの車両位置のずれ量と、道路外状況検出手段により検出された道路外の状況とに基づき警告方法を判定する判定手段と、判定手段により判定された警告方法に応じて警告を行う警告手段と、を有することを特徴とする車両制御装置を提供する。
(もっと読む)
車両位置検出装置及びシステム
【課題】敷設コストを抑え、精度の高い位置検出を可能とする車両位置検出装置を提供する。
【解決手段】車両位置検出装置において、車両周辺の映像を撮影する撮像部と、撮影された映像を画像データとして取り込む入力部と、取り込まれた画像データの中から所定の形状を持つ指標を認識し、認識された指標の種類を特定する認識部と、特定された指標の種類とその指標の種類に対応する位置情報とを記憶する記憶部と、特定された指標の種類に基づき、上記記憶部から位置情報を取得する取得部と、取得された位置情報により車両の位置を決定する決定部とを備える。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
車載用ナビゲーション装置
【課題】 絶対傾斜角を検出することによって、傾斜を有する地点においても自車位置を高精度に検出することができ、ひいては、自車を目的地まで迅速かつ適切に案内することができる「車載用ナビゲーション装置」を提供すること。
【解決手段】 自車の進行方向に対する自車の絶対的な傾斜角度である絶対傾斜角を計算する絶対傾斜角計算手段32と、この絶対傾斜角計算手段32によって算出された前記絶対傾斜角に応じたジャイロセンサ6の感度の補正を行う補正手段33とを備えたこと。
(もっと読む)
測位データ処理方法
【課題】 測位センサの一部から測位データが得られなくなっても、複数の測位データの組み合わせ演算で得られる位置データに位置跳びの影響が出ることを回避でき、安定した制御を行うことができる測位データ処理方法を提供する。
【解決手段】 船舶又は浮体の位置制御において、複数の測位センサ1〜Nで検出される複数の測位データXaniに対して、それぞれドリフト補正を行い、該ドリフト補正を行った後のドリフト補正後測位データXcniに対して、それぞれの時系列データのバラツキに応じた加重平均処理を行って、位置制御のための位置データXciを得る。
(もっと読む)
車載ナビゲーション装置及び自車位置推定方法
【課題】屋内駐車場などのGPS信号の受信が困難な施設内で、施設側の設備に依存することなく、自車位置を精度良く推定することができるようにする。
【解決手段】周回走行判定部27が走行軌跡算出部25によって算出された自車の走行軌跡に基づいて、自車が周回走行を行っているか否かを判定する。周回走行判定部27により自車が周回走行を行っていると判定された場合、自車位置推定部24は、走行軌跡記憶部26に記憶されている周回走行の走行軌跡と、走行距離検出部22により検出された自車の走行距離とに基づいて、自車位置を推定する。
(もっと読む)
121 - 140 / 186
[ Back to top ]