
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
61 - 80 / 186
車両用ナビゲーション装置
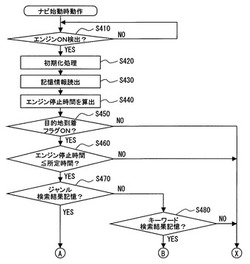
【課題】所望の施設に到着しても、何らかの事情で他の施設を探す必要がある場合に、他の施設の検索を簡単に行うことが可能な車両用ナビゲーション装置を提供する。
【解決手段】複数の施設情報を示す検索結果画面において、一の施設が選択された目的地に設定された場合、その検索結果画面を記憶しておく。そして、車両が目的地施設に到着したとき、車両のエンジンがオフされてから、再びオンされるまでのエンジン停止時間を所定時間と比較して、ユーザの目的地施設の滞在時間を推定する。そして、目的地施設におけるユーザの滞在時間がその施設を利用するには短か過ぎる場合、他の代替施設を探す可能性が高いとみなして、記憶した検索結果画面を表示する。これにより、ユーザは、煩雑な操作を行わずとも、当初の目的地施設の代わりとなる施設を簡単に探すことができる。
(もっと読む)
ナビゲーション装置

【課題】車両に搭載されるナビゲーション装置において、その装置の構成を大きくすることなく、確実に正しい日時が算出できるようにする。
【解決手段】車両用ナビゲーション装置では、GPS信号受信部が受信するGPS信号から、1980年1月6日午前0時を基準として約19.7年ごとにロールオーバーするGPS時刻データを取得すると共に(S160:YES)、ナビゲーション装置が有する地図DBから、地図情報が生成された生成日時情報を取得して(S200)、そのGPS時刻データと生成日時情報を取得とから、現在の正確な日時を算出する(S170)。
(もっと読む)
車種判別プログラムおよび車種判別装置
【課題】撮影機器の設置条件に関わらず、精度よく車種を判別することができる車種判別プログラムおよび車種判別装置を提供すること。
【解決手段】車種判別装置100は、認識対象の画像から車両部分を抽出する車両部分抽出部112と、車両部分抽出部112により抽出された車両部分においてボンネットに相当する領域を認識するボンネット認識部114と、ボンネット認識部114によって認識されたボンネット領域の側面の傾きの大きさに基づいて車種を判別する車種判別部113とを備える。
(もっと読む)
物体検出方法および物体検出装置
【課題】初期設定が容易でありながら、高い検出精度を得ることができる物体検出方法および物体検出装置を提供すること。
【解決手段】カメラ1とレーダ2からの入力に基づいて得られる外界に存在する物体に関する情報に基づいて物体の検出を行うコントロールユニットCUが、前記情報を、あらかじめ設定された物体の種類とその判定に用いる情報ごとの重要度とに基づいて設定された重要度特性と照合することで物体の種類を判定する物体判定処理と、この物体判定処理における判定結果が正しい場合、前記重要度特性におけるその物体の種類判定に用いられた情報の重要度を増加させる更新処理と、を行うようにした。
(もっと読む)
対象物認識装置
【課題】本発明は、対象物認識装置に係り、道路上の対象物の認識に要する処理負荷を軽減することにある。
【解決手段】GPSや車速,舵角等による走行軌跡に基づいて自車両の位置を測位すると共に、カメラ撮像画像を用いた対象物の認識結果に基づいて自車両の位置を測位する。また、主に車両の移動距離が長くなるほど低下する自車両の位置を測位するうえでの測位精度を算出する。予め地図データベースに自車両の認識すべき道路上の対象物の位置データを格納する。そして、測位される自車両の位置、地図データベースに格納されている認識すべき対象物の位置、及び算出される自車位置の測位精度に基づいて、対象物を認識すべき道路の認識範囲を設定する。この設定された認識範囲においてカメラ撮像画像を処理して対象物を認識する。
(もっと読む)
車両位置検出装置
【課題】演算処理時間に起因した誤差要因を適切に排除して、現時点の車両の位置を高精度に検出すること。
【解決手段】本発明は、車両に搭載され、該車両の位置を検出する車両位置検出装置において、車両外に存在する特定の対象物の位置情報を記憶した記憶手段30と、前記特定の対象物を検出する対象物検出手段32と、前記対象物検出手段の検出データに基づいて、前記対象物検出手段により検出された対象物に対する車両の相対位置を導出する相対位置導出手段と、前記記憶された対象物の位置情報を基準として、前記導出された対象物に対する車両の相対位置と、前記対象物検出手段の検出データの取得時点から前記相対位置を導出する時点までの補正時間とに基づいて、現時点の車両の位置を算出する車両位置算出手段と、を備えることを特徴とする。
(もっと読む)
車両位置推定装置
【課題】目印の位置データを予め記憶することなく、自車両の絶対位置を精度良く検出できる車両位置推定装置を提供する。
【解決手段】自車両の絶対位置及び自車両の絶対位置を基準とした周囲の目印(ランドマーク)の相対位置を複数回検出し、当該複数回検出された自車両の絶対位置及び目印の相対位置に基づいて誤差の最も小さい目印の絶対位置を推定すると共に、当該目印の絶対位置と検出される目印の相対位置に基づき自車両の絶対位置を推定する。
(もっと読む)
車載用ナビゲーション装置
【課題】旋回走行を要する自走式の駐車場における旋回走行によって、自車方位および自車位置の誤差が発生したとしても、これらの誤差を迅速かつ適切に補正することができ、自車方位精度および自車位置精度を向上させることができる「車載用ナビゲーション装置」を提供すること。
【解決手段】自車位置・方位補正手段29,38により、駐車場における自車両の旋回走行の中心点を回転中心とした回転処理手段37による回転後の所定範囲の走行軌跡を用いて、自車方位の補正および自車位置の補正を行うこと。
(もっと読む)
車両位置測位装置及び車両位置測位方法
【課題】 軌道上を走る車両において通常の衛星測位を実施すると、軌道位置の考慮がされないため、軌道を外れた位置に測位結果が算出されることがある。
【解決手段】 GPS衛星から観測データを受信するGPS受信機と、前記車両の車両速度を検出する車速検出器と、前記軌道上に所定の間隔で設けられた複数のポイントにおける位置座標と前記位置座標における前記軌道の方角とを対応させて記憶する線路データベースと、前記観測データと、前記車両速度と、前記線路データベースの中から抽出した自らの位置に最も近い前記位置座標に対応した前記軌道方向とを入力し、前記車両速度と前記軌道方向とを用いた慣性航法による航法演算を行って、前記観測データを用いたGPS航法による位置演算を補完して前記車両の位置を演算する演算部とを備えたようにした。
(もっと読む)
自車位置/方位修正装置及びその方法
【課題】GPS信号を受信できないか又は受信が困難な場所であっても、自車の位置及び方位を修正することのできる「自車位置/方位修正装置及びその方法」を提供する。
【解決手段】自車位置/方位修正装置は、記憶手段と、自車位置及び方位を検出する自車位置検出手段と、直線走行路を検出する直線路検出手段と、前記自車位置及び方位を修正する位置方位修正手段と、前記記憶手段、自車位置検出手段、直線路検出手段及び位置方位修正手段に動作可能に接続された制御手段とを有する。前記制御手段は、自車が屋内駐車場(43)に進入したと判定した後、前記直線路検出手段によって最初に直線走行路であると判定された走行路(45)を基準直線路として前記記憶手段に格納し、さらに前記直線路検出手段によって検出された直線走行路(48)を走行する自車の位置(48a)及び方位(θ2)を前記基準直線路を基に前記位置方位修正手段に修正させる。
(もっと読む)
移動体搭載測位装置及びその測位方法
【課題】移動体搭載の測位装置において、位置データを受信することが出来る衛星の数が不足している場合でも、GNSS衛星からのデータのみで測位演算をすることによって、移動体搭載の測位装置の小型化、単純化を図る。
【解決手段】位置データを受信できる衛星が不足した場合には、過去の測位データから現在の車両1の速度ベクトルを推定して、車両1はこの速度ベクトルを延長した直線30上を走行しているものとして、GNSSデータから求めたGNSS衛星20と車両1との距離ρ1を用いて、車両1の測位位置を特定する。
(もっと読む)
車両位置演算装置、車両選定方法
【課題】車車間通信している他車両の位置を高精度に検出可能な車両位置演算装置、車両選定方法を提供すること。
【解決手段】自車に搭載された他車の位置を検出する他車位置検出手段11と、外部から他車の位置情報を取得する他車位置情報取得手段14と、他車位置検出手段11により検出された他車の位置に対応する位置情報の他車を選定する他車選定手段10と、を有することを特徴とする車両位置演算装置、車両選定方法を提供する。
(もっと読む)
位置情報提供システム、位置情報提供装置および屋内送信機
【課題】電波が届かない場所において位置情報を提供する。
【解決手段】位置情報提供装置が実行する処理は、受信された測位信号を取得するステップ(S610)と、測位信号の発信源を特定するステップ(S612)と、測位信号の発信源が屋外である場合に、測位信号に含まれる航法メッセージを取得するステップ(S622)と、その信号に基づいて位置を算出するための処理を実行するステップ(S624)と、測位信号の発信源が屋内である場合に、測位信号からメッセージデータを取得するステップ(S630)と、そのデータから座標値を取得するステップ(S632)と、その座標値に基づいて位置情報を表示するステップ(S650)とを含む。
(もっと読む)
自車位置認識装置及び自車位置認識方法
【課題】地物の画像認識結果を用いて自車位置の認識を行うに際して、自車両と地物との間の距離の認識精度を高め、認識率の低下を防止し、地物の全体が一つの画像情報の中に含まれていない場合であっても画像認識を比較的容易に行う。
【解決手段】画像情報Gを取得する画像情報取得手段6と、自車位置情報Sを取得する自車位置情報取得手段5と、自車位置情報Sに基づいて撮像装置14により撮像される対象地物の地物情報Fを取得する地物情報取得手段3と、地物情報Fに基づいて地物種別に応じた複数箇所の測定点の形態情報及び位置情報を含む測定点情報Mを取得する測定点情報取得手段4と、測定点の形態情報に基づいて画像情報Gに含まれている複数箇所の測定点の画像認識を行う画像認識手段7と、画像認識された測定点の画像認識結果と当該測定点の位置情報とに基づいて自車位置情報Sを補正する自車位置補正手段10と、を備える。
(もっと読む)
車両用前照灯制御装置
【課題】コーナ走行時等に運転者が注視すべき方向を適切に照明する車両用前照灯制御装置を提供すること。
【解決手段】運転者の顔向き方向を検出する顔向き方向検出手段12と、車両の操舵角を検出する操舵角検出手段17と、車両の車速を検出する車速検出手段23と、操舵角及び車速に基づき前照灯の照明軸方向を決定する照明軸方向決定手段15と、車両方向と顔向き方向とのなす角が車両方向と照明軸方向とのなす角より大きく、かつ、照明軸方向と顔向き方向とのなす角が車両方向と顔向き方向とのなす角より小さい場合、顔向き方向に照明軸方向を補正する補正手段15と、を有することを特徴とする。
(もっと読む)
位置表示装置
【課題】使用者の利便性を向上することができる位置表示装置を提供する。
【解決手段】GPS簡易地図上位置表示装置1は、2つの基準点それぞれについて、緯度および経度を含む実座標と、画面上のX座標およびY座標を含む相対座標を取得し、位置情報テーブル22に格納する。また、GPS簡易地図上位置表示装置1は、実座標上の三角形と相対座標上の三角形との相似関係に基づき、任意の地点の実座標からその相対座標を算出する。さらに、GPS簡易地図上位置表示装置1は、算出された相対座標に基づき、外部から取り込んだ地図画像上に現在地を表示する。
(もっと読む)
駐停車違反抑止システム
【課題】ユーザが道路交通法の定める駐停車禁止区域で駐停車しようとした場合に、より効果的に駐停車違反を抑止する駐停車違反抑止システムを提供する。
【解決手段】標識や信号などの路上施設にRFIDタグを埋め込み、車速が所定の閾値以下になった場合(S110)に車両からタグ内に記憶された標識情報を読み取る(S120)。その中に駐停車禁止情報がある場合(S130:yes)で、且車両が駐停車している場合(S140:yes)には、駐停車違反を行った旨をユーザに報知し(S150)、さらには近くにある駐停車可能区域への表示・音声案内・経路案内を行う(S160)。
(もっと読む)
測位装置及び測位方法
【課題】電波航法により絶対位置、絶対速度を得ることができない場合、或いは、電波航法による測位精度が低い場合でも、自律航法における測定誤差を的確に推測する。
【解決手段】電波を受信している衛星の数や配置等に基づいて、電波航法で得られる絶対測位情報が高信頼度であるかを判定し(ステップS2)、高信頼度であるときには、電波航法による絶対測位情報を利用して、自律航法による測位結果の測定誤差を推定する(ステップS4)。電波航法による絶対測位情報が高信頼度でない場合は、捕捉衛星の中から受信パワーや仰角がしきい値よりも大きい高信頼度衛星を選択し(ステップS5)、この高信頼度衛星との間の擬似距離及びドップラ周波数を算出しこれを利用して、自律航法による測位結果の測定誤差を推定する(ステップS6)。そして推定した測定誤差を用いて自律航法による測位結果を補正し、測位装置10本体の測定位置を得る。
(もっと読む)
車両走行位置推定システム及び車両走行位置推定方法
【課題】マルチパスの影響により計測位置データが誤差を含む場合に、この影響を加味して計測位置データを補正しなくても車両の正確な道路の幅方向の走行位置を推定することができる車両走行位置推定システム及び車両走行位置推定方法を提供する。
【解決手段】通信部403は、路上ビーコン3から通信回線5を介して走行軌跡情報を受信する。走行軌跡解析部404は、走行軌跡解析の処理を実現し、走行軌跡受信情報の計測位置データのばらつきに基づいて、車両100の道路の幅方向の走行位置を推定する。交通情報提供部405は、交通情報提供の処理を実現する。マルチパス判定部406は、リンク−マルチパス対応データ及び車線−ばらつき対応データを作成する。制御部407は、記憶部400、時計部401、GPS処理部402、通信部403、走行軌跡解析部404、交通情報提供部405、マルチパス判定部406の処理を制御する。
(もっと読む)
車両用測距装置
【課題】リフレクタが高い位置にある先行車も確実に認識するとともに、天候に関係なく実際には障害物とならない看板等の誤検出を防止する車両用測距装置を提供する。
【解決手段】レーザレーダ装置(車両用測距装置)は、レーザ光を2次元スキャンするスキャナ13と、制御回路11とを備えている。制御回路11は、スキャンにより得られた受光データから、検出した物体が所定条件を満たしていれば看板候補オブジェクトとして距離値を登録する。この距離値を自車速に基づいて時間継続的に更新する。制御回路11は、遠方に存在し、所定幅以上の物体について看板と判定する。また、近傍に存在する物体については上記看板候補オブジェクトの距離値と比較し、これと略一致し、かつ下方向に検知していなければ看板と判定する。
(もっと読む)
61 - 80 / 186
[ Back to top ]