
Fターム[5H180CC30]の内容
Fターム[5H180CC30]に分類される特許
161 - 180 / 186
角速度センサ装置、角速度計測方法及びプログラム、ナビゲーション装置、方法及びプログラム
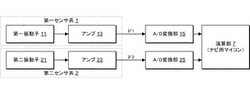
【課題】カーナビゲーションなどに用いる角速度センサに関する技術において、相対的に角度差のある2つの振動ジャイロを用いて、ピッチ角に対してフリーでかつセット取付角を設定不要とし、しかも高精度な車両ヨー角度を取得するようにする。
【解決手段】A/D変換部15,25を通じて各振動子11,21の出力電圧を取得し、回転していないときの中点電位からの差を得る。角速度の大きさを示すスカラ量を計算し、各センサの電圧の符号から、実際の角速度を計算する。カーナビゲーション装置における実際の車両のヨー角度は、初期値をもとに、上記のように逐次算出する角速度を実時間で数値積分することにより導出する。
(もっと読む)
車載ナビゲーション装置及び自車位置補正方法

【課題】GPS衛星からの信号の受信が困難な状況が継続する場合であっても自車位置を高精度に検出できるようにする。
【解決手段】自車が走行している走行路に破線のレーンマークが敷設されている場合に、この破線のレーンマークを含む画像を車載カメラで撮影し、車載カメラで撮影された画像の画像認識処理により、破線のレーンマークの破線間隔を測定するとともに、自車が通過した単位線の本数を計数する。そして、これら破線のレーンマークの破線間隔と通過単位線の本数とに基づいて自車の走行距離を算出し、算出した走行距離に基づいて自車位置を補正する。
(もっと読む)
カーナビゲーション装置のマップマッチング方法およびカーナビゲーション装置
【課題】 道路形状に特徴がない場合でも、表示装置の地図上の自車両の現在位置を実際の現在位置に補正することができる
【解決手段】 道路の形態が車両に上下方向の振動を発生させる地点(例えば踏み切り通過地点)を振動地点として地図データに記憶しておき、振動センサが車両の上下方向の振動を検出したとき、表示装置の地図上に表示された自車位置を、地図データに記憶された振動地点に補正する。このため、道路形状に特徴がない場合でも、表示装置の地図上の自車両の現在位置を実際の現在位置に補正することができる。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 速度データの補正をより正確に行うことができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位された速度データが予測加速度最大値(第1の予測範囲)内にあるか否かを判定する第1の判定部16aと、測位された速度データが予測加速度最大値外と判定されたとき、当該速度データが予測加速度最大値の2倍の範囲(第2の予測範囲)内にあるか否かを判定する第2の判定部16bと、当該速度データが第1の予測範囲外であってかつ第2の予測範囲内であるとき、当該速度データを第1の補正速度に補正し、当該速度データが第2の予測範囲外であるとき、当該速度データを異常速度として当該速度データを第2の補正速度に補正し、補正された速度データに基づき移動体の位置を算出する位置算出部18とを有する。
(もっと読む)
車両撮影方法およびその装置
【課題】 輝度値の異なる運転席の運転者とナンバープレートを同時に撮影するためには、ナンバープレートの輝度値が上がり過ぎないようにして車両全体を明るく照明するか運転席用の専用照明が必要になるといった問題があった。
【解決手段】 撮影した原画像からナンバープレートを抽出した画像を予め記憶し、原画像を所定のγ値でγ補正した画像を取得し、該γ補正画像と前記記憶されているナンバープレートの原画像とを合成することでナンバープレートのナンバーと運転席の運転者の顔を明瞭とした画像を抽出することを特徴とする車両撮影方法である。
(もっと読む)
測位装置、測位システム、測位方法および測位プログラム
【課題】 記憶容量の増大を抑制しつつ、地球中心を1個のGPS衛星と見立てて測位計算を精度よく行えるようにする。
【解決手段】 動端末107a、107bからGPSサーバ102への接続が確立すると、移動端末107a、107bが接続したアクセスポイントの情報を専用プロトコルによって送信パケットに付加し、GPSサーバ102に伝達し、GPSサーバ102は、移動端末107a、107bが接続したアクセスポイントの情報に基づいて高度テーブル103aを検索することにより、現在の移動端末107a、107bの位置に対応した高度情報を取得し、移動端末107a、107bに送信し、測位手段108a、108bは、現在の移動端末107a、107bの位置に対応した高度情報を取得すると、地球中心を衛星と見立てて測位計算を行う。
(もっと読む)
高さ情報を生成する衛星ナビゲーションシステム
車両用の衛星ナビゲーションシステム(100)が、車両が位置する地理的位置の標準高さ情報の生成機能を備える。このシステム(100)は、ナビゲーション衛星からの受信信号の関数として位置データを生成できる衛星受信器(110)を有し得る。この位置データは、軽度、緯度、および楕円高さの情報を有し得る。このシステム(100)は、起伏グリッドモデル(146)またはデジタル地図(142)中のある地理的範囲に対して起伏値を記憶し得る。このシステム(100)は、その位置の近似起伏値を決定し、その位置の標準高度値を計算し得る。 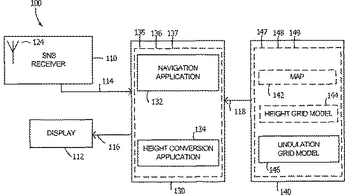 (もっと読む)
(もっと読む)
速度誤差ベクトル解析法
【課題】違反者に予知されないように計測方位と計測時間を元に速度測定のために推定速度設定し計測結果を定量的に評価し、違反者の実際の速度を求めるための目標運動解析の評価法を開示し、予知されると言う問題点を解決する。
【解決の手段】実際の速度が不明であっても、速度誤差ベクトルの性質を利用し、目標計側始点方位を基準に、計測方位毎の速度誤差ベクトル(解析評価ポイント)の変化の割合が一定となる距離を求めれば、それが実際の計測距離となり、計測始点方位と実際の速度ベクトルの方向(既知)の延長線との交点及び計測終点方位と実際の速度ベクトルの方向(既知)の延長線との交点を結ぶ距離を計測時間で割れば実際の速度が判明し、本発明の課題を解決する事が出来る。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 本発明は、移動体の走行状態に応じて精度良く移動体の位置の算出をすることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位衛星からの受信電波を受信するRF受信部12と、受信された信号から移動体の速度および角速度データを測位する測位演算部14と、速度と角速度の関係を規定する角度予測関数に基づき角速度の予測範囲を設定する予測範囲設定部16と、測位された角速度データが予測範囲内にあるか否かを判定し、角速度データが予測範囲外の場合には、角速度データが予測範囲内となるように角速度データを補正する測位データ補正部20と、移動体の走行状態を判定し、当該判定結果に応じて予測範囲設定部16による角度予測関数の選択を制御する予測範囲可変部18とを含んで構成される。
(もっと読む)
ナビゲーション装置
【課題】 誤差範囲の設定精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、測位位置の計算に使用された複数のGPS衛星のそれぞれの仰角値の検出と、複数のGPS衛星の重心位置の検出を行うとともに、検出した仰角と重心位置とに基づいて測位位置の誤差範囲を設定する誤差円半径計算部14と、GPS受信機2から出力された測位位置と誤差円半径計算部14によって設定された誤差範囲とを用いて現在位置の計算を行う車両位置計算部20とを備えている。
(もっと読む)
磁気センサによる車両検出装置
【課題】
複数の磁気センサによる出力が同時に零出力になっても、それが車両不存在によるものか、又は、存在によるものなのかを判断できる車両検出装置を提供することである
【解決手段】
磁気検出特性が異なる複数の磁気センサ又は磁気検出特性が異なるように配置された複数の磁気センサからの出力において、前記複数の磁気センサからの出力が同時に車両が存在しない場合の出力値に接近していることを検出した場合に、磁気センサからの出力の変化の傾きを所定時間間隔で計算し、前記傾きが所定値以下で所定時間以上継続するかを判定基準としてコンピュータ判定器において判別する。
(もっと読む)
移動情報管理システム、管理装置、移動情報管理方法、通信装置、処理方法およびプログラム
【課題】 車両に対して実際の走行軌跡に基づいて交通管理をできるようにすること。
【解決手段】 車載装置100は測定部120で測位を行い、測位した位置情報を車載装置100を搭載した車両の移動情報としてドライブレコーダー130に記憶する。路側機200の路側機通信部210は近くを通行した車両に搭載された車載装置100のDSRCユニット110と通信し、識別情報記憶部140に記憶された車載装置100の識別情報を取得する。情報センター300の情報センター通信部310は車載装置100の移動情報と路側機200が通信した車載装置100の識別情報とを受信する。移動情報判定部320は移動情報に識別情報を取得した路側機200の所在位置が含まれるかを判定し、含まれない場合、移動情報を誤った情報として処理する。課金部340は正しい情報であると判定された移動情報に対して課金処理を行う。
(もっと読む)
旅行時間提供方法、装置及びプログラム
【課題】旅行時間を予測しようとする道路区間の、当日の現在時刻までの旅行時間実測データと、同じ道路区間の過去の旅行時間統計データとを用いて、当日の将来時刻における旅行時間を精度よく予測し提供する。
【解決手段】旅行時間を予測しようとする道路区間の、当日の現在時刻までの旅行時間実測データを収集し、前記道路区間について、当日と同じ交通条件の日の、過去に収集された1又は複数の旅行時間統計データを取得し、前記旅行時間統計データの現在時刻以後のデータ列に基づき、現在時刻以後のある時刻tの旅行時間予測データを予測し、その予測された旅行時間予測データを当該時刻tより所定時間前(t−t0)の旅行時間予測データとして提供する。
(もっと読む)
ナビゲーション装置
【課題】目的地点の設定時の利用者の負担を軽減し、経路探索を容易に行なえるようにする。
【解決手段】カメラ14a付きの携帯電話機14で撮影した画像データをナビゲーション装置100に送信すると、制御回路8は、通信ユニット13または送受信装置16を経由して画像データを受信して画像認識を行ない、画像認識結果データに基づいて目的地点の設定を行なう。これにより、利用者は、簡単な操作で目的地点の設定を行なうことができる。
(もっと読む)
3次元海底地形図表示装置及び方法
【課題】 広範囲に渡る領域の水深データを従来よりも高い精度で提供する。
【解決手段】 欠損メッシュの補間方法に対して、補間に使用するデータ数を制限したクリギング法を適用する事で、従来のクリギング法と比較して少ない計算量で、補間精度の高い海底地形を生成する事が可能となる。
(もっと読む)
Uターン検出装置及びそのUターン検出方法
【目的】 Uターン開始後短い走行距離で、かつ正確に、Uターン判定を行なえる「Uターン検出装置及びそのUターン検出方法」を提供することである。
【構成】 車両のUターンを検出するナビゲーションシステムにおいて、車両の旋回開始位置から現車両位置までの旋回角度を算出し、かつ旋回部分における平均曲率を算出し、旋回角度が設定角度範囲内にあり、かつ、平均曲率が設定曲率より小さい時、Uターンしたと判定する。更に、車両が峠道に存在する場合にはUターン判定を停止する。
(もっと読む)
出力制御装置、その方法、そのプログラム、および、そのプログラムを記録した記録媒体
【課題】各種情報を適切に出力できるナビゲーション装置を提供する。
【解決手段】ナビゲーション装置200の処理部270は、コンテンツデータを取得して、出力装置400の表示部420で表示させる。処理部270は、出力装置400で出力させているコンテンツデータの番組連動データを取得する。処理部270は、この番組連動データの内容データが地点文字列情報の文字列を有していることを認識すると、この文字列で示される地点に対応する地図情報をコンテンツ関連地図情報として取得して、出力手段400の表示部420で表示させる。
(もっと読む)
ナビゲーション装置および建築施設進入判定方法
【課題】 加速度センサや傾斜センサなどの別機器を配備することなく、車両が駐車場に入ったことを精度高く、かつ、早期に検出することが可能な「ナビゲーション装置および建築施設進入判定方法」を提供する。
【解決手段】 GPS受信機から取得される衛星配置情報により示される衛星配置パターンに基づいて、車両が駐車場に入ったか否かを判定することにより、GPS受信機があれば駐車場への進入を検出できるようにして別機器の配備を不要とするとともに、自車位置の情報に基づくマップマッチングの影響を受けることもなく、車両が駐車場に入ったことを精度高く検出できるようにする。さらに、駐車場の入口付近で受信される衛星配置情報を利用することで、車両が駐車場の内部に入り込まなくても進入の有無を判定できるようにする。
(もっと読む)
走行路推定装置
【課題】 走行路に応じた車両制御を行う車両制御装置において、交差点通過後、高速に、その車両制御を復帰させることが可能な走行路推定装置を提供すること。
【解決手段】 ナビゲーション装置が備える走行路確定出力部は、車両が交差点以外を走行中の場合、ステータスを、マップマッチング部により推定された走行路の信頼性が高いことを示す「確定」に設定する(S140)。一方、車両が交差点に進入すると、ステータスを、推定される走行路の信頼性が低く、走行路を確定することができないことを示す「不確定」に設定する(S150)。また、交差点進入後の車両の走行距離が基準距離を越えた時点で、車両が旋回していないと、その時点で、ステータスを「確定」に切り替え、走行距離が基準距離を越えた時点で、車両が旋回していると、旋回完了時点で、ステータスを「確定」に切り替える(S190)。
(もっと読む)
移動体端末及び加速度情報に基づき位置を決定するための方法
移動体端末が受信した無線通信信号(GPS信号、衛星信号、セルラー信号、ワイド・エリア・ネットワーク信号、無線ローカル・ネットワーク信号等)に基づいて加速度計測回路が校正される。そして、当該移動体端末の位置が、校正された加速度計測回路を利用して決定される。よって、加速度計測回路の校正により、その精度が改善され、結果として位置決定精度も改善される。異なる実施形態では、移動体端末の位置は、(GPS信号などの無線通信信号を用いて推定される)第1の位置と、(第1の位置からの移動体端末の移動距離を計算するために利用される加速度情報に基づいて計算される)第2の位置とを結合することにより決定される。 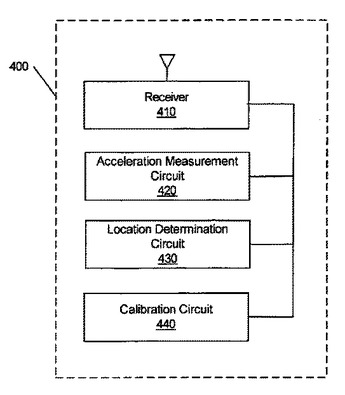 (もっと読む)
(もっと読む)
161 - 180 / 186
[ Back to top ]