
自位置認識システム

【課題】他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得る。
【解決手段】各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成するとともに、受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段10を備え、送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
【解決手段】各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段43bを備え、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成するとともに、受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段10を備え、送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段44を備え、送信車両の自信度が、受信車両の自信度より高い場合に、送信車両の自位置及び相対位置関係に基づいて自位置の補正を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーション装置等に採用される自位置認識システムに関する。
【背景技術】
【0002】
自位置の正確な認識は、ナビゲーション装置、走行制御装置等にとって非常に重要な事項である。
自位置の認識システムとしては、所謂、自律航法システムが知られているとともに、GPS情報等の他者からの情報に基づいて自位置を認識する他律航法システムも知られている。さらに、走行路に沿って位置される地物(例えば、交差点にある停止線・走行路に沿って引かれている白線(実線・破線等を含む))等を、撮像情報から認識し、これら地物の位置から自位置を認識するシステムも採用されつつある。
これら3種のシステムは、基本的に自車側で検出可能な情報から自位置を認識・決定するシステムである。
【0003】
一方、自車以外の他車の有する情報から自位置を認識・決定しようとするシステムも提案されている。
特許文献1に開示される技術がこの種の技術であり、この文献に開示の技術では、前方車の位置情報に基づいて、後方車は自位置を認識・決定する。この技術では、他車の情報を利用することで、一群の車両の位置関係を良好に認識できる。
【0004】
【特許文献1】特開平9−245287号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、自車が検出できる情報のみを基準として自位置を決定しようとすると、それらシステム固有の認識限界を超えることはできない。
例えば、自律航法センサから得られる情報から、自車の移動軌跡を逐次演算して逐次自位置を認識するシステムでは、走行距離の増加に伴って認識誤差が蓄積され、その確からしさが走行距離の増加に伴って低下することがよく知られている。
GPS情報等を使用する他律航法の場合は、GPS情報から得られる位置情報の精度限界が、確からしさの限界となる。
一方、地物の位置から自位置を認識するシステムにあっては、地物が存在する位置において自位置認識を行うため、その精度は高く、確からしさをかなり高いものとできるが、自位置認識に使用できる地物が常時、走行路に沿って存在するわけではない。
【0006】
そこで、先にも示したように、他車の位置情報を自位置の認識に使用することが試みられるようになっている。例えば、特許文献1に開示されている技術は、前方車両の持つ位置情報を後方車両が自車の自位置の認識に使用しようとするものであるが、使用しようとする前方車両の自位置の確からしさ、精度に関しては、何ら考慮されていない。
【0007】
従って、前方車両の位置情報、車間距離とで一意的に自車の位置補正を行うと、前方車両の位置情報の精度が必ずしも高いものとは限らず、良好でない前方車両の位置情報から自車の自位置を認識・決定することとなり、自位置認識の精度が悪化してしまう。
【0008】
本発明の目的は、他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得ることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明に係る、
各車両に、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段とを備え、
車両間で情報通信を行う車車間通信手段を備える自位置認識システムの特徴構成は、
各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成されるとともに、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行うものである。
【0010】
この自位置認識システムにおける自位置の認識方法は、以下の手順を経るものとなる。
即ち、各車両で、自位置の認識を行う自位置認識工程と、前記自位置認識工程で認識される自位置を補正する自位置補正工程とを実行し、
車両間で情報通信を行う自位置認識方法の特徴手段は、
各車両で、自位置の確からしさの指標である自信度を演算する自信度演算工程を実行し、
送信車両から受信車両に、送信車両の自位置及び自信度を送信し、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出工程を実行し、
前記送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較工程を実行し、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記自位置補正工程において、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行うのである。
【0011】
このシステムでは、送信車両と受信車両との両方の車両で、自ら認識する自位置の自信度が求められる。即ち、自ら自位置と認識している認識自体の確からしさの指標である自信度が、各車両で保有される。ここで、自位置としては、後に実施の形態で示すように、走行路に沿った方向での位置、走行路の巾方向の位置、或いは、走行していると認識している走行路自体(走行路識別名等で識別された走行路)であったりする。
【0012】
そして、このシステムでは、送信車両から受信車両に、送信車両が認識している自位置及びその自信度が送信される。そして、先ず、自信度間の比較が実行される。このようにすることで、送信車両側と受信車両側との間で、自信度の高い側の車両が何れの車両かが判明する。そして、本願にあっては、自信度が高い側の車両の自位置を基準に、受信車両の自位置が補正される。この時、送信車両と受信車両との位置関係は、別途求めることとしておき、送信車両が認識している自位置と車両間の位置関係とに基づいて、受信車両の自位置を求める。結果、受信車両の自位置を精度の高いものとできる。
【0013】
従って、このシステムでは、各車両が認識している自位置と、その自位置の確度(信頼性)に基づいて、車両群を成す各車両の自位置を補正・決定するため、位置精度が高いものとなり、自位置に関する情報を使用するナビゲーション、走行制御等を従来より的確なものとできる。
【0014】
このシステム構成で採用される送信側の車両に搭載されるべきシステム構成は、以下の構成となる。
即ち、送信側のシステムである自位置認識用送信システムは、
自位置の認識を行う自位置認識手段、前記自位置認識手段により認識される自位置を補正する補正手段、及び車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、受信車両に、自車の自位置及び自信度を送信可能に構成されているものとなる。
【0015】
一方、受信側であり、自位置の補正を状況に応じて行う自位置認識用受信システムの構成は、これが、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段及び、車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から送られてくる送信車両の自位置及び自信度を受信可能に構成されるとともに、自車に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、自車が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、自車の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正するものとできる。
【0016】
さて、以上の構成の自位置認識システムにおいて、
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係であることが、好ましい。
【0017】
この構成を採用することで、自位置は走行路に沿った方向で認識され、受信車両の走行路に沿った自位置認識を、良好に行える。
この認識を行う手段では、前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係であることとなる。
【0018】
さらに、上記の走行路に沿った位置認識を行うシステムにおいて、
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正することが、好ましい。
【0019】
この構成のシステムでは、前後方向に位置する車両間で、後方車両側の自位置認識を良好に行える。
【0020】
このシステムの特徴手段は、前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正することとなる。
【0021】
以上説明してきた構成において、前記自位置認識手段が、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成されることが好ましい。
これら一種以上の情報に基づいて、自位置認識手段が自位置を認識することで、自車で得られる情報に従った自位置の認識を実行できる。
【0022】
さて、以上の説明は、認識対象の自位置が、走行路に沿った位置として認識される場合を対象としたが、自位置の認識としては、自車がどの走行路を走行しているかの認識を行う場合もある。以下の説明は、認識の対象が走行路となる場合の例である。
【0023】
即ち、前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係であることが、好ましい。
【0024】
このシステムでは、自位置を走行路単位で認識し(本願にあっては、このようにして認識される走行路を認識走行路と呼ぶ)、自信度を、この認識の確からしさに係る指標とし、さらに、相対位置関係として、各車両が走行している走行路間の関係を相対位置関係でとして求めることで、送信車両の認識走行路から受信車両の認識走行路を補正・決定することができ、走行している走行路の特定を良好に行える。
この種の走行路の認定は、例えば、並行に走っている並行路が存在し、並行路間で走行している走行路の特定が困難を伴う場合に有効な認識判定技術を与えることができる。
【0025】
この場合、特徴手段としては、前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係であるとして、認識方法は成立する。
【0026】
さらに、前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正するものとすることが好ましい。
このようにすることで、自車周りに存する周囲車両の保有する情報を利用して、自信度が高い、自車が走行している走行路を特定する情報である認識走行路情報を得ることができる。
【0027】
この場合、特徴手段は、前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正することとなる。
【0028】
この場合も、前記自位置認識手段としては、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成されるものとできる。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態に関して、図面を使用して説明する。
本明細書にあっては、認識対象となる自位置が、車が走行路に沿って走行している状況における走行方向に沿った走行路上の位置である第一実施の形態、走行方向に対してその巾方向での位置であり、具体的には走行レーンrを認識する第二実施の形態、並行路等、複数の走行路を自車が走行していると認識される可能性がある状況において、実際に走行している走行路がどの走行路であるかを認識対象とする第三実施の形態に関して、順に紹介する。
第二実施の形態、第三実施の形態は、それぞれ、第一実施の形態で実行可能な走行路に沿った方向での自位置の認識機能に加えて、走行路巾方向の認識、走行路自体の認識が可能となっているため、第二実施の形態、第三実施の形態の説明では、追加的な機能に関して説明する。
【0030】
これらの実施の形態において、自位置補正の実行に際して、自車Ci内で、予め自位置が認識されているとともに、この自位置の自信度が求められており、他車Coから、他車Coが認識している自位置とその自信度とを受信して、先ず、自信度間の比較を行い、他車Coの自信度が自車の自信度より高い場合にのみ、他車Coの自位置に基づいて自車Ciの自位置を補正行う点において、共通する。
【0031】
1 第一実施の形態
この実施の形態は、認識対象となる自位置が走行方向に沿った走行路R上の位置である例であり、例えば、図5、図6に示すように、紙面上下方向における走行路R上の位置を認識する例である。これらの図は、走行路Rを下から上に車が走行している状態を示している。
図上、上側に図示される車が、これまで説明してきた他車Coに相当し、下側に図示される車が、自車Ciに相当する。従って、これらの例では、下側に図示される自車Ciにおいて、他車Coからの自位置情報に基づいて、自位置の補正を行うか否かが問題となる。
【0032】
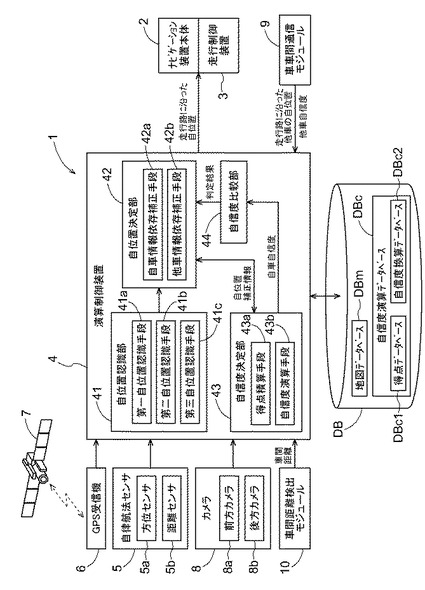
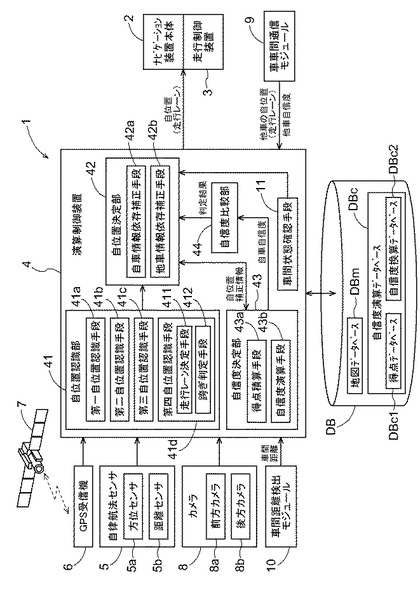
この実施形態における、自車側の自位置認識システム1の形態を図1に示した。
自位置認識システム1は、自車Ciの自位置を決定するためのシステムとして構築されており、この自位置認識システム1により求められた自位置の情報が、ナビゲーション情報を生成するためのナビゲーション装置本体2、あるいは走行制御を行うための走行制御装置3に送られ、適確に使用される。
【0033】
ナビゲーション装置本体2にあっては、例えば、自位置の情報は、現在の正確な自位置に基づいて、新たなルート探索、案内に使用されるとともに、地図上に現在位置を正確に表示するのに使用される。
走行制御装置3では、例えば、前方に停止線があり、自車Ciが停止の必要がある場合に、適確な減速制御を行うために使用される。
【0034】
自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された種々の附属機器を備えて構成されている。
【0035】
演算制御装置4には、自律航法センサ5からの検出情報が取り込み可能に構成されている。この自律航法センサ5は、具体的には自車の向いている方位を検出するための方位センサ5aと、例えば、ドライブシャフトといった、車輪に連結されている回転体の回転数から車両の走行距離を求める距離センサ5bとを備えて構成されている。
自律航法センサ5からの検出情報は、自車の移動軌跡の演算に使用される。即ち、予め設定されている特定の時間間隔間で、距離センサ5bから判明する走行距離分だけ、方位センサ5aにより検出された方位に移動したものとして、自車の移動軌跡を求めていくことで、逐次的に自位置を求めることができる。
【0036】
演算制御装置4には、GPS受信機6が接続されており、逐次、GPS衛星7から送られてくるGPS情報を受信して、演算制御装置4内で、このGPS情報から、GPS情報に基づいた自位置の認識が可能となっている。GPS情報に基づいて求められる自位置は、経度及び緯度の組み合わせとして得られる情報である。
【0037】
演算制御装置4には、前方カメラ8a及び後方カメラ8bからの撮像情報である画像情報が入力されるように構成されており、画像認識により、それぞれのカメラ8の撮像範囲内にある例えば地物Mを認識可能に構成されている。図8(b)が、前方カメラ8aにより撮像された画像の例である。
【0038】
演算制御装置4には、車車間通信モジュール9(車車通信手段の一例)が接続されており、このモジュール9から車車間通信により受信された情報が入ってくるように構成されている。本願にあっては、この車車間通信で通信の対象となる情報は、他車Coである送信車両の自位置の情報およびその自信度である。
【0039】
演算制御装置4には、車間距離検出モジュール10(位置関係検出手段の一例)が接続されており、この車間距離検出モジュール10から、自車Ciに対する送信車両Coの相対位置情報が入ってくるように構成されている。図5、図6に示す例においては、車間距離検出モジュール10は、前方車両Coとの間の車間距離を検出する。即ち、走行路Rにおいて、その走行方向前方に存する送信車両Coと自車Ciとの間の車間距離が演算制御装置4に入力される。
【0040】
演算制御装置4には、データベースDBが備えられており、このデータベースDBとして、地図データベースDBmと自信度演算データベースDBcが備えられている。このデータベースDBは、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウエア構成として備えている。
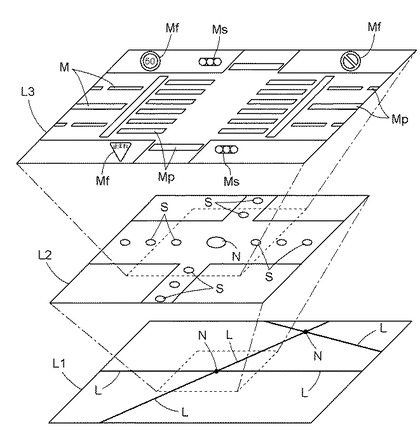
地図データベースDBmは、地図情報を格納したデータベースである。図2は、地図データベースDBmに格納されている地図情報の内容を示す説明図である。この図に示すように、地図データベースDBmには、地図情報として、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
道路ネットワークレイヤL1は、走行路Rである道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路を構成する多数のリンクLの情報とを有して構成されている。また、各リンクLは、そのリンク情報として、道路名、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。
道路形状レイヤL2は、道路ネットワークレイヤL1に関連付けられて格納され、道路の形状を示すレイヤである。具体的には、2つのノードNの間(リンクL上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の道路形状補完点Sの情報と、各道路形状補完点Sにおける道路幅Wの情報とを有して構成されている。
【0041】
地物レイヤL3は、道路ネットワークレイヤL1及び道路形状レイヤL2に関連付けられて格納され、道路上及び道路の周辺に設けられた各種地物の情報を示すレイヤである。この地物レイヤL3に格納される地物Mの情報としては、少なくともカメラ等で撮像可能な画像認識の対象となる地物Mが、その関連情報とともに格納されている。
具体的には地物Mとして、道路の路面に設けられたペイント表示の地物Mp、道路に沿って設けられた各種の道路標識Mfや信号機Ms等の立体物の地物等の各種の地物についての情報が地物レイヤL3に格納されている。ここで、ペイント表示には、例えば、車線を分ける白線(実線、破線、中央線等の区画線の種類の情報も含む。)、ゼブラゾーン、停止線、横断歩道、各レーンの進行方向を指定する進行方向別通行区分表示、速度表示等が含まれる。また、正確にはペイントによるものではないが、同じく道路の路面に設けられるマンホールもここではペイント表示に含めてもよい。また、立体物としては、各種の道路標識や信号機のほか、ガードレール、建物、電柱、看板等の道路上又は道路の周辺に設けられる様々な立体物が含まれる。
【0042】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、地物レイヤL3に様々な地物Mがその位置とともに登録されているため、先に説明したカメラ8により撮像される画像内に特定の地物Mが撮像された場合に、その地物Mの地図データベースDBmに登録された位置と、画像から判明する地物Mと自車Ciとの位置関係から、自車Ciの位置(絶対座標位置)を認識することができる。
【0043】
自信度演算データベースDBcは、得点データベースDBc1及び自信度換算データベースDBc2を備えて構成されている。
得点データベースDBc1は、以下の表1に示すように、自位置の認識のタイミングで、加算又は減算される得点(表1左欄に示す)と、その得点の事例要因(表1右欄に示す)との関係を纏めたデータテーブルである。得点の加算及び減算は、左欄に示されるプラスマイナスで決まる。
【0044】
【表1】

【0045】
表1に示す事例要因に関して例示的に説明しておくと、「道路上の地物を認識し位置補正が成された直後」に、得点が50点加算される。これは、地物Mの認識を行って位置補正をすると、その確からしさが最も増す状況となるためである。
一方、「地物認識位置補正後10m毎」に得点は5点ごと減算される。この状況は、地物認識で位置補正をした後、通常の自律航法で自位置を認識しながら走っている状況では、走行距離に応じて自信度が低下することに対応している。
GPSの受信状況に関しては、その受信状況が比較的良好な場合は、比較的高い得点を与えることができる(20点加算)が、悪い場合は、得点に変化がない(0点加算)ことを示している。
交差点右左折直後、カーブでの補正後には、それらの地点情報に基づいて、ある程度の得点を与えることができる(前者で20点加算、後者で10点加算)。一方、トンネル内において、自信度は低下する(10点減算)。さらに、カメラ等の画像認識システム、GPS受信機の故障等により自信度が低下する(前者で40点減算、後者で30点減算)。
【0046】
自信度換算データベースDBc2の構造を表2に示した。
この表は、得点の積算値として得られる総得点(表2右欄)と自信度(表2左欄)との関係を示したものであり、総得点が高いほど、自信度が高く設定されていることが判る。
【0047】
【表2】
【0048】
以上が、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図1からも判明するように、この装置4には、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0049】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置の認識を実行する機能部であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い自位置を補正・決定する機能部である。
一方、自信度決定部43は、上記のようにして決定される自位置に関する自信度を演算する機能部であり、自信度比較部44は、車車間通信モジュール9を介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定部42において、他車情報依存の補正を行い、自位置を決定するべきか否かの判定を行う機能部である。
【0050】
この例にあっては、自位置認識部41には、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられている。
第一自位置認識手段41aは、自律航法により自位置を求める手段であり、方位センサ5a及び距離センサ5bからの情報に基づいて、自車の移動軌跡を順次、自位置の認識処理タイミング毎に求め、自位置を認識する手段である。
【0051】
第二自位置認識手段41bは、GPS衛星から所定のタイミングで受信されるGPS情報に基づいて、自位置を認識する手段である。
【0052】
第三自位置認識手段41cは、カメラ8等の撮像情報と、地図データベースDBm内に記憶されている地物Mの情報とを対比し、同一の地物Mが撮像画像内に認められた場合に、その地物Mの位置情報に基づいて自位置を認識する手段である。この手段による自位置認識は、地物Mの存在を前提とするため、地物Mが存在する地点に自車が到達したタイミングにおいてのみ、認識が行われる。
【0053】
自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。
【0054】
自車情報依存補正手段42aは、過去に決定された自位置に対して、新たな自位置が自位置認識部41で認識された場合に、新たな認識情報に基づいて、現在の自位置を補正・決定する機能手段である。即ち、自位置認識部41に備えられる、それぞれの自位置認識手段41a,41b,41cは、一定のタイミング(第一自位置認識手段41aは一定の時間間隔毎、第二自位置認識手段41bはGPS情報の取り込みタイミング毎、第三自位置認識手段41cは自位置認識に使用可能な地物が画像認識される毎)で、自位置を認識するが、この決定手段42aにあっては、原則的には、第一自位置認識手段41aにより認識される自位置を補正・決定に使用しながら、第二、第三の自位置認識手段41b,41cにより認識された自位置が存在する場合は、第一自位置認識手段41aにより認識される自位置より後者手段により認識される自位置ほど優先して、自位置を補正・決定する。
【0055】
即ち、本例の場合、後者側ほど、自位置認識の確からしさが高いため、後者側の情報を優先して自位置の補正・決定に使用する。ここで、自位置認識の頻度は、前者側ほど高いため、第二、第三自位置認識手段41b,41cで、自位置認識が行えない状況にあっては、自律航法に基づいて認識された自位置が自動的に使用される。
このようにすることで、自車情報依存補正手段42aにおいては、常時、自車で得られる情報から自位置が補正・決定される。
【0056】
他車情報依存補正手段42bは、本願独特の補正手法を実行する機能手段である。
この手段は、自車情報に基づいて自車情報依存補正手段42aにより決定された自位置に対して、他車Coの自位置が受信され、他車Coの自位置についての自信度が高いことを条件として、他車Coの自位置を基準として自車Ciの自位置を補正・決定する。
この他車情報依存補正手段42bへは、他車Coの自位置と、自車Ciと他車Coとの車間距離が入力される。そこで、この手段42bでは、他車Coの自位置を基準として、車間距離だけ離れた位置を自位置として求める。
このようにして求められた自位置は、自車情報依存補正手段42aにより決定された自位置に対して優先するものとされ、この手段42bが働く場合は、他車情報依存補正手段42bにより決定された自位置が、現在の自位置として決定される。
このように決定してよい理由は、この他車情報依存補正手段42bに位置決定に必要な情報が送られ、この手段における処理を実行する段階にあっては、自信度比較部44において他車Coの自信度が自車Ciの自信度より高いとの判定結果がでている状態だからである。
【0057】
自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部42において自位置決定が行われる毎に、その決定状況を判定し、決定状況が得点の加算・減算に相当する状況である場合には、表1に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。同時に、常時実行されている自律航法による自位置の決定が行われると、表1に示すように、地物認識位置補正後、10mの走行毎に、5点の減算を行う。
この総得点には、その上限値(例えば100点)と下限値(例えば−100点)が設けられており、特定事象が連続して起こっても総得点は、一定の範囲内に収まるように構成されている。
【0058】
この積算状況を、図3に基づいて説明する。
図3において、上図は車Cの走行状態を示しており、下図は上図に示す走行が行われた場合の総得点(得点積算値)の変化を示したものである。
上図は、車Cが右側から左側へ走行する状況を示したものであり、走行方向に、自位置を認識可能な地物Mである横断歩道Xがあり、その先にトンネルTがある状況を示している。一方、下向きの矢印は、矢印が記載されている位置で、自位置の決定が逐次なされたことを示している。この例では、最初に地物Mである横断歩道Xにより、自位置が認識・決定され、以降、自律航法による自位置認識状態がしばらく継続し、その間、2回、GPS情報が受信されて、GPS情報に基づく自位置認識、補正を行った後、トンネルTに到達している。
【0059】
総得点の変化は、最初、総得点が0であるとして、先ず地物Mによる自位置の認識である横断歩道Xを利用した自位置認識が行われた時点で50点の加算がおこなわれる。その後、自律航法状態で、総得点は逐次減少していくが、GPS情報を利用した自位置認識が行われた時点毎に20点の加算が行われ、総得点は、図示する様なのこぎり歯状の変化となる。トンネルTに突入することで、その進入時に10点が減算されることを示している。
【0060】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、走行状態にある車において、常時、演算された自信度が保持される。
【0061】
以上が、この実施形態における演算制御装置4の構成の説明であるが、以下、図4、図5、図6に基づいて、走行方向に沿った走行路上での位置の補正に関して説明する。
説明においては、自車Ci及び他車Coの存在を前提とするが、両車Ci,Coは、自位置の認識、補正・決定を可能とする機能部、補正・決定した自位置の自信度を演算する機能部、車車通信モジュール9が備えられている。さらに、自車Ciには他車Coとの車間距離を検出するための車間距離検出モジュール10が備えられている。
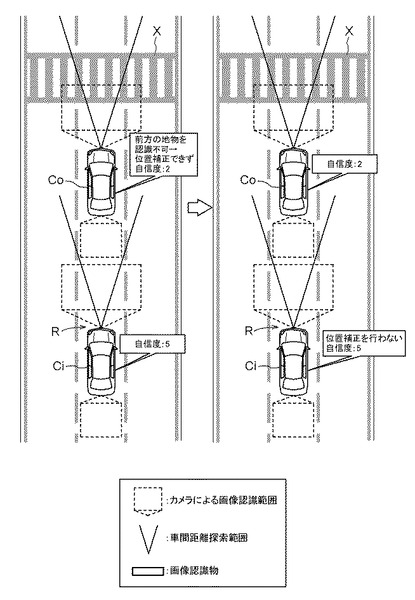
図5、図6は、他車Coが先行して横断歩道Xがある位置に到達した状況を示しており、自車Ciは、他車Coに後続する状態で、他車Coに近接しようとしている。従って、他車Coは送信車両となり、自車Ciは受信車両となる。
図5、図6とは、ともに他車Coが地物Mである横断歩道Xに近づいた状況を示しているが、図5に示す状態では、地物認識が良好に行われ、横断歩道Xの位置を基準として他車Coの自位置が良好に決定された状況を示している。従って、他車Coの自信度は2から10に変更されている。
一方、図6に示す状態では、地物認識が良好に行われなかったため、横断歩道Xの位置を基準として他車Coの自位置が良好に決定されなかった状況を示している。従って、他車Coの自信度は2のままである。
【0062】
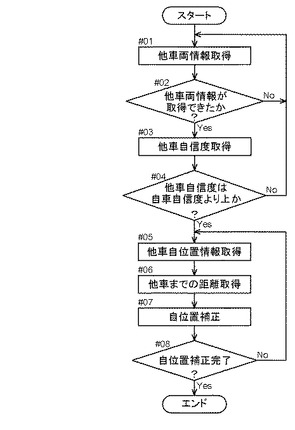
この状態から、自車Ciと他車Coとの間における車車間通信を利用しての自車Ciの自位置の補正・決定が実行される。
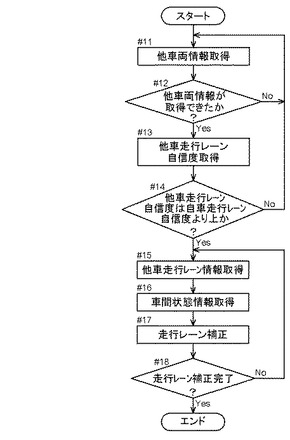
図4は、この状態における自車Ciにおける処理フローを示したものである。
以下、このフローに従って、説明を進める。
処理の開始に伴って他車Co(前方車両)の情報を取得する(ステップ1)。このとき取得される情報には、他車Coの識別番号、車種、通信形態等が含まれる。他車Coの情報の取得ができず、他車Coの認識が行えない場合(ステップ2:no)は、情報取得を繰り返す。情報の取得ができ、通信を確立できた場合(ステップ2:yes)は、他車Coの自信度を取得する(ステップ3)。
そして、自信度比較部44で、他車Coと自車Ciとの自信度を比較する(ステップ4)。比較の結果、他車Coの自信度が自車Ciの自信度より高い場合(ステップ4:yes)は、他車Coの自位置の情報に基づいて自車Coの自位置を補正する処理に移る(ステップ5〜8)。
【0063】
一方、比較の結果、他車Coの自信度が自車Ciの自信度より低い場合(ステップ4:no)は、ステップ1に戻り、他車Coの自信度が自車Ciの自信度を上回るまで、ステップ1〜4の処理を繰り返す。この状況が、図6に示される状況であり、この図では、後続車である自車Ciの自位置が他車の情報に従って補正されることはない。
【0064】
図5に示すように、自車Ciの自信度が他車Coの自信度より低い場合の処理は、以下の処理を順次実行する。即ち、他車Co(前方車両)の自位置の情報を取得する(ステップ5)。そして、車間距離検出モジュール10により、他車Coと自車Ciとの車間距離を検出し、取得する(ステップ6)。引き続いて、他車情報依存補正手段42bは、このようにして得られる他車Coの自位置と車間距離から自車Ciの自位置を求め、得られた自位置を現在の位置として自車Ciの自位置を補正・決定する(ステップ7)。この補正が良好に完了した場合は、自位置の補正・決定処理を完了し(ステップ8:yes)、何らかの理由で完了できなかった場合は、ステップ5に戻って処理を実行する。完了した場合、自車Ciの自位置認識の自信度は、他車の自信度に置換する。
この状況が図5に示した状況であり、自車Ciの自信度が5から10に変更されている。
【0065】
2 第二実施の形態
この実施の形態は、認識対象となる自位置が走行方向に対してその横方向での走行路上の巾方向の位置(具体的には走行レーンr)である例であり、図11、図12に示すように、走行レーンrを認識、補正・決定する例である。これらの例でも、図上、上側に図示される車が他車Coに相当し、下側に図示される車が自車Ciに相当する。従って、下側に図示される自車Ciにおいて、他車Coからの自位置に関する情報(走行レーンの情報)に基づいて、自車Ciの走行レーンrの補正を行うか否かが問題となる。
【0066】
この実施形態のシステム形態を図7に示した。
本システムから得られる走行レーン情報は、先の例と同様に、ナビゲーション装置本体2あるいは走行制御装置3に送られて、的確なナビゲーション、走行制御に使用される。
【0067】
この例にあっても、自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された附属機器とを備えて構成される。
【0068】
演算制御装置4には、先の例と同様に、自律航法センサ5、GPS受信機6、前方カメラ8a及び後方カメラ8bが接続されており、それぞれの機器からの検出情報が入力される。車車間通信モジュール9が接続されていることも先の例と同様である。
【0069】
先の例では、自車Ciと他車Coとの車間距離を検出するための車間距離検出モジュール9が設けられていたが、それに加えて、制御演算装置4内に、前方カメラ8a等の撮像装置からの情報である撮像情報から、画像認識処理により自車Ciと他車Coとの位置関係である車間状態を確認する位置関係検出手段としての車間状態確認手段11が備えられている。この手段11の構成に関しては、後に詳述する。
【0070】
演算制御装置4には、データベースDBが備えられており、このデータベースDBには、地図データベースDBmと自信度演算データベースDBcが備えられている。
地図データベースDBmは、先の例で示したと同様に図3に示すように階層化された構成を採用されており、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
【0071】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの走行路Rに沿った位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、地物レイヤL3に様々な地物Mがその位置とともに登録されているため、カメラ8により撮像される画像情報内に特定の地物Mの画像が含まれている場合に、その地物Mの位置情報から、自車Ciの位置(走行レーンr)を認識することができる。この実施の形態では、自車Ciが走行している走行レーンrを問題とするため、特に、路肩の位置、車線を分ける白線(実線、破線、中央線等)等の登録情報が利用される。
【0072】
即ち、図8(b)に示すように、カメラ8等から得られる撮像情報における路肩G1iの位置、車線を分ける白線(実線G2i、破線G3i、中央線G4i等)の位置と、現在の自車Ciの位置において、地図データベースDBmから得られる地物Mに関する情報である、図8(a)に示すおける路肩G1dの位置、車線を分ける白線(実線G2d、破線G3d、中央線G4d等)の位置との比較により、自車Ciの走行レーンrを認識することができる。この走行レーンrの認識に関しては、第四自位置認識手段41dにおいて説明する。
【0073】
自信度演算データベースDBcは、先の例と同様に、得点データベースDBm及び自信度換算データベースDBcを備えて構成されている。
得点データベースDBmは、走行路巾方向の自位置認識に関しては、以下の表3に示すように、走行レーンの認識タイミングで、加算又は減算される得点(表3左欄に示す)と、その得点の事例要因(表3右欄に示す)の関係を纏めたデータベースである。得点の加算及び減算は、左欄に示されるプラスマイナスに依存することとなる。
【0074】
【表3】
【0075】
表3に示す事例要因に関して例示的に説明しておくと、「路肩、白線等々を良好に認識」できた場合に、得点が50点加算されることを示している。これは、地物の認識が確実に行われているため、正確に走行レーンが判別できる状況にあるためである。
一方、「跨ぎ判定を行い、路肩は認識、白線は未認識」の場合は、得点が30点加算されることを示している。さらに、「跨ぎ判定はできなかったが、白線を良好に認識」した場合は、得点が20点加算されることを示している。ここで、跨ぎ判定とは、後述する第四自位置認識手段41dにおいて白線を跨ぐ走行が行われた否かに基づいて行われる判定である。この判定の可否、及び路肩、白線等の認識の可否に基づいて、走行レーン認識の確からしさは、同表に示すように低くなる。
さらに、「4レーン以上の道路走行時、左右レーン白線が破線で、跨ぎ判定が行われない」状況では、得点が与えれることはない。
跨ぎ、白線、路肩の認識ができない状況では、できなくなった段階から10m走行毎に、得点5点が減算される。
さらに白線のない道路を走行している状況では、得点20点が減算される。
その他、それぞれに状況に応じて、得点の加算及び減算を行うように得点が決定されているのは、先の例と同様である。
【0076】
自信度換算データベースDBc2の構造は先に示した表2と同様であり、その使用形態も同様である。
【0077】
以上が、この例において、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図7からも判明するように、この例にあっても、この装置4内に、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0078】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置(この例の場合は走行レーン)の認識をも実行する機能部であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い走行レーンをも決定する機能部である。
一方、自信度決定部43は、上記のようにして決定される走行レーンrに関する自信度をも演算する機能部であり、自信度比較部44は、車車間通信モジュールを介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定手段43において、他車情報依存の補正を行うか否かの判定情報を得る機能部である。
【0079】
自位置認識部41には、先に説明した、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられているほか、第四自位置認識手段41dが備えられている。
第一、第二、第三自位置認識手段41a,41b,41cの機能は、走行方向に沿った自位置を認識する上で、先の第一実施の形態の場合と同様であり、説明を省略する。
【0080】
第四自位置認識手段41dは、現在、走行している走行レーンrを認識する機能部であり、この機能を果たす走行レーン決定手段411を備えている。この走行レーン決定手段411に対する補助手段として跨ぎ判定手段412が備えられており、この跨ぎ判定手段412による判定結果が、走行レーン決定手段411による走行レーンrの決定に使用できるように構成されている。
【0081】
走行レーン決定手段411は、基本的には、カメラ8等からの画像情報と、地図データベースDBm内に記憶されている地物情報とを対比し、同一の地物Mが認識された場合に、その地物Mの位置情報(具体的には画像情報内で認識される白線の位置関係)に基づいて、現在の走行レーンrを認識する手段である。この手段による自位置認識は、地物Mの存在を前提とするため、地物Mが存在する地点にいるタイミングで、認識が行われる。
【0082】
この第四自位置認識手段41dによる処理は、走行方向を横断する方向での処理である。従って、走行方法に沿って決定された自位置を利用して、地図データベースDBmからその地点の道路状況に対応した地物M(路肩G1d、実線G2d、破線G3d、中央線G4dの種別、配置等)の情報を抽出し、図8に示すように、地図情報側から得られる情報(図8(a))と、画像情報から得られ情報(図8(b))とを比較する。そして、自車Ciが特定の走行レーンrにあるとした場合に撮像されるべき撮像情報と、現実に撮像された画像情報を比較対照することで、その一致度が高い場合に、その走行レーンrを自車が走行している走行レーンrを割り出すことができる。この図8では、自車Ciが左レーンを走行している状況を示している。
【0083】
この第四自位置認識手段41dには、さらに、所謂、跨ぎ判定手段412が備えられている。この判定手段412は、逐次得られる画像情報を逐次監視することで、自車Ciにより区画線の跨ぎが行われた否かを、その跨ぎ方向とともに監視する。そして、所定方向での跨ぎが行われたと判断された場合には、現在認識している走行レーンrから、移動方向にレーン間の跨ぎが行われたとして、跨ぎ後の走行レーンrを現在の走行レーンとして認識する。
【0084】
この例にあっても、自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。走行路Rに沿った自位置に決定は、第一の実施の形態と同様に行われるため、以下の説明では、走行レーンrの決定に関してのみ説明する。
【0085】
自車情報依存補正手段42aは、過去に決定された走行レーンrに対して、新たな走行レーンrが自位置認識部41で認識された場合は、新たな走行レーンrに現在の走行レーンrを補正する。この例では、自位置認識部41に備えられる第四自位置認識手段41dによる認識結果が、走行レーンrの決定に、実質上、そのまま使用される。
このようにすることで、常時、逐次的に、自車側で得られる情報から、自車Ciの走行レーンrが順次、決定される。
【0086】
他車情報依存補正手段42bは、自車情報に基づいて決定された走行レーンrに対して、他車Coの走行レーンr(自位置)が受信され、他車Coの走行レーンrについての自信度が高いことを条件として、他車Coの走行レーンrから自車Ciの走行レーンrを基準として自車Ciの走行レーンrを補正・決定する。
この他車情報依存補正手段42bへは、他車Coの走行レーンr、車間状態確認手段11から自車Ciと他車Coとの間における走行レーンrに関する関係情報が送られてくる。そして、この手段42bでは、他車Coの走行レーンrを基準として、自車Ciの走行レーンrを決定する。例えば、前方カメラ8aで得られた画像より、他車Coが自車Ciと同一の走行レーンrを走行していることが確認された状況で、他車Coが保有している走行レーンrの情報が、自車情報依存補正手段42aにより決定された走行レーンrに対して優先するものとされ、他車情報依存補正手段42bにより決定された走行レーンrが、現在の走行レーンrとして決定される。
【0087】
この例にあっても、自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部43において走行レーン決定が行われる毎に、その決定状況を判定し、決定状況が得点に加算・減算に相当する状況である場合には、表3に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。但し、この例では、総得点の上限値及び下限値が設定されており、例えば、撮像情報を利用して良好に走行レーンrを認識する認識状態が連続して、比較的長い時間継続しても、総得点が上限を超えないように総得点が調整されるように構成されている。
【0088】
この積算状況を、図9に基づいて説明する。
上図は、図3と同様に、車Cが右側から左側へ走行する状況を示したものであり、走行路Rが、路肩、白線等を良好に認識できていた走行路から、認識できなくなった状況を示しており、その後、再度、跨ぎ判定が可能となって、これを行い、その後、路肩は認識可能で白線を認識できていない状況で、さらに全く認識ができなくなり、白線のない走行路に至った状況を示している。
【0089】
総得点の変化は、最初、先ず、路肩、白線等が良好に認識されたことで、50点の総得点が確保されていた状況に対応している。その後、跨ぎ、白線、路肩を認識できなくなったことで、順次、減算が行われ、再跨ぎ判定が行われたことで、30点の加算が行われ、さらに減算が行われ、総得点は、図示する様なのこぎり歯状の変化となる。そして、白線のない走行路に至ることで、その進入時に30点が減算されることを示している。
【0090】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、この例の場合も、自信度は、走行状態にある車において、常時、決定された自信度が保持されることとなる。
【0091】
車間状態確認手段11は、カメラ8等から得られる撮像情報に基づいて、自車Ciと他車Coとの間における、走行レーンrの関係を確認する手段である。即ち、撮像情報に現れた他車Coと白線との関係から、相互の車Cが走行している走行レーンrの状態を確認する。例えば、図11、12に示される状況では、自車Ci及び他車Coは、同一の白線対Mp内に存在する撮像が得られるため、同一走行レーンrにいることが確認できる。一方、図8(b)に示す撮像が得られた場合、自車Ciに対して右側に位置する白線(破線)を越えて、他車Coが撮影されているため、他車Coが左側の走行レーンrにいることが確認できる。
よって、他車Coの自信度が、自車Ciの自信度より高い場合に、他車Coが認識している走行レーンrの情報と、この車間状態確認手段11により得られる情報を利用して、現在の自車Ciの走行レーンrを補正・決定できる。
【0092】
以上が、この実施形態における演算制御装置4の構成の説明であるが、以下、図10、図11、図12に基づいて、走行レーンrの補正・決定に関して説明する。
図11と図12とは、ともに他車Coが地物Mである白線Mp(具体的には破断線)の認識を行っている状況を示しているが、図11に示す例では、地物認識が良好に行われ、他車Coの走行レーンrが良好に決定された状況を示している。従って、他車Coの自信度は10とされている。
一方、図12に示す例では、地物認識が良好に行われなかったため、走行レーンrは誤って認識されており(左レーンと認識している)、自信度が低い状況を示している。従って、他車Coの自信度は4である。
【0093】
この状態から、自車Ciと他車Coとの間における車車間通信を利用しての自車Ciの走行レーンrの補正・決定処理が本願に係るシステムでは実行される。
図10は、この状態における自車Ciにおける処理フローを示したものである。
以下、このフローに従って、説明を進める。
処理の開始に伴って他車Co(前方車両)の情報を取得する(ステップ11)。このとき取得される情報には、他車Coの識別番号、車種、通信形態等が含まれる。他車Coの情報の取得ができず、他車Coの認識が行えない場合(ステップ12:no)は、情報取得を繰り返す。情報の取得ができ、通信を確立できた場合(ステップ12:yes)は、他車Coの自信度を取得する(ステップ13)。
そして、自信度比較部44で、他車Coと自車Ciとの自信度を比較する(ステップ14)。比較の結果、他車Coの自信度が自車Ciの自信度より高い場合(ステップ14:yes)は、他車Coの走行レーンrの情報に基づいて自車Ciの走行レーンrを補正する処理に移る。
【0094】
一方、比較の結果、他車Coの自信度が自車の自信度より低い場合(ステップ14:no)は、ステップ11に戻り、他車Coの自信度が自車Ciの自信度を上回るまで、ステップ11〜14の処理を繰り返すこととなる。この状況が、図12に示される状況であり、この図では、後続車である自車Ciの自位置が補正され、自信度8が変更されることはない。
【0095】
図11に示すように、自車Ciの自信度が他車Coの自信度より低い場合の処理は、以下の処理を順次おこなう。即ち、他車Co(前方車両)の走行レーンrの情報を取得する(ステップ15)。そして、車間状態確認手段11により、他車Coと自車Ciとの走行レーンrの関係を検出する(ステップ16)。図11に示す例では、他車Coと自車Ciとは同一の走行レーンrを走行していることが撮像情報から確認される。引き続いて、このようにして得られる他車Coの走行レーンrから自車Ciの走行レーンrを求め、他車情報依存補正手段42bが、得られた走行レーンCiを現在の走行レーンrとして自車Ciの走行レーンrを補正する(ステップ17)。この補正が良好に完了した場合は、走行レーンrの補正処理を完了し(ステップ18:yes)、何らかの理由で完了できなかった場合は、ステップ15に戻って処理を実行する。完了した場合、自車Coの自位置認識の自信度は、他車の自信度に置換する。
この状況が図11に示した状況であり、自車Coの自信度が3から10に変更されている。
【0096】
3 第三実施の形態
この実施の形態は、認識対象となる自位置が走行路自体である例である。
この実施形態のシステム形態を図13に示した。
本システムから得られる自位置に関する情報である認識走行路に関する情報は、ナビゲーション装置本体2あるいは走行制御装置3に送られて、的確なナビゲーション、走行制御に使用される。
【0097】
この例にあっても、自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された附属機器とを備えて構成される。
【0098】
演算制御装置4には、先の例と同様に、自律航法センサ5、GPS受信機6、前方カメラ8a及び後方カメラ8bが接続されており、それぞれの機器からの検出情報が入力される。車車間通信モジュール9が接続されていることも先の例と同様である。
【0099】
第一の実施形態では、自車と他車との車間距離を検出するための車間距離検出モジュール10が設けられていたが、本例にあっては、この装置10に加えて、第二の実施形態と同様に、制御演算装置4内に、前方カメラ8a等の撮像装置からの情報である撮像情報から、画像認識により自車Ciと他車Coとの位置関係である車間状態を確認する車間状態確認手段11が備えられている。
【0100】
演算制御装置4には、記憶手段としてのデータベースDBが備えられており、このデータベースDBには、地図データベースDBmと自信度演算データベースDBcが備えられている。
地図データベースDBmは、図3に示すように階層化された構成を採用されており、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
【0101】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの走行路Rに沿った位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、走行路自体の識別情報(例えば走行路名)が格納されており、第一の実施の形態で説明したように、走行路R上での、その走行路に沿った自位置が決定できた段階で、現在走行中と認識している走行路R(この走行路が、本願にいう認識走行路である)を認識できるようにされている。この走行路R自体の認識に関しては、第五自位置認識手段41eにおいて説明する。
【0102】
自信度演算データベースDBcは、先の例と同様に、得点データベースDBc1及び自信度換算データベースDBc2を備えて構成されている。
得点データベースDBc1は、以下の表4に示すように、自位置の認識のタイミングで、加算又は減算される得点(表4左欄に示す)と、その得点の事例要因(表4右欄に示す)の関係を纏めたデータベースである。得点の加算及び減算は、左欄に示されるプラスマイナスに依存することとなる。但し、この例では、自位置は走行路自体であるため、事例に対応する総得点の加算・減算に関して、実質上、自車が走行していると認識している走行路に変更の可能性がない状態(例えば、分岐・合流等に到達していない)では、加算・減算は行わない。即ち、現実の走行路変更を行ったと認識した場合、あるいは、分岐を通過する等、走行路に変更の可能性があった場合に、単一回の加算・減算を行う。
【0103】
【表4】
【0104】
表4に示す事例要因に関して例示的に説明しておくと、「一本道にマッチングしており、近くに並走路がない」場合に、得点が50点加算されることを示している。これは、マッチングが確実に行われているため、正確に自車が走行している走行路自体が認識できる状況にあるためである。
一方、「並走路がある道を走行」している場合は、並走路に離間状態で、得点が加算されることを示している。並走路が近くにあるほうが、加算点は低くなり、事実上、並走路が20m以内にある場合は、加算される得点はなくなる。
さらに、「上下道のような直近に並走路がある」場合は、10点減点されることを示している。また「分岐直後」には、得点が10点減算される。
その他、それぞれに状況に応じて、得点の加算及び減算を行うように得点が決定されているのは、先の例と同様である。
【0105】
自信度換算データベースDBc2の構造は先に示した表2と同様であり、その使用形態も同様である。
【0106】
以上が、この例において、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図13からも判明するように、この装置4内にも、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0107】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置(走行路自体である認識走行路)の認識をも実行する機能部位であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い走行路をも決定する機能部位である。
一方、自信度決定部43は、上記のようにして決定される認識走行路に関する自信度をも演算する機能部であり、自信度比較部44は、車車間通信モジュール10を介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定部43において、他車情報依存の補正を行うか否かの判定情報をも得る機能部である。
【0108】
この例にあっては、自位置認識部41には、先に説明した、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられているほか、第五自位置認識手段41eが備えられている。
第一、第二、第三自位置認識手段41a,41b,41cの機能は、走行路Rにおける走行方向に沿った自位置を認識する上で、先の第一実施の形態の場合と同様であり、説明を省略する。
【0109】
第五自位置認識手段41eは、現在、走行している走行路Rを認識する機能部である。この手段41eにおいては、自位置決定部42において、走行路Rに沿った自位置が逐次決定されているため、その決定において自車が走行していると認識している走行路自体を認識走行路とする。この走行路の認識で使用する識別情報は、例えば、先に説明した各走行路単位でデータベースに登録されている走行路名である。
【0110】
この例にあっても、自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。走行路Rに沿った自位置に決定は、第一の実施の形態と同様に行われるため、以下の説明では、走行路の決定に関してのみ説明する。
【0111】
自車情報依存補正手段42bは、過去に決定された認識走行路Rに対して、新たな認識走行路Rが自位置認識部で認識された場合は、新たな認識走行路Rに現在の認識走行路を補正する。この例では、自位置認識部41に備えられる第五自位置認識手段41eによる認識結果が、認識走行路Rの補正・決定に、実質上、そのまま使用される。
このようにすることで、常時、逐次的に、自車側で得られる情報から、自車の認識走行路が順次、決定される。
【0112】
他車情報依存補正手段42bは、自車情報に基づいて決定された走行路Rに対して、他車Coの認識走行路(自位置)が受信され、他車Coの認識走行路についての自信度が高いことを条件として、他車Coの認識走行路から自車の走行路を補正・決定する。
この他車情報依存補正手段42bへは、図13に示すように、他車Coの認識走行路の情報と、車間状態確認手段11から自車Ciと他車Coとが実際に走行している走行路間に関する関係情報が送られてくる。そして、この手段42bでは、他車Coの認識走行路を基準として、自車Ciの認識走行路を決定する。例えば、前方カメラ8で得られた撮像画像より、他車Coが自車Ciと同一の走行路Rを走行していることが確認された状況で、他車Coが保有している認識走行路の情報が、自車情報依存補正手段42aにより決定された認識走行路に対して優先するものとされ、他車情報依存補正手段42bにより決定された走行路が、現在の認識走行路として決定される。
【0113】
この例にあっても、自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部42において認識走行路の補正・決定が行われ、自車が分岐に到達する毎に、その時点の状況を判定し、状況が得点に加算・減算に相当する状況である場合には、表4に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。この例の場合も、総得点には、その上限値と下限値とを設けている。
【0114】
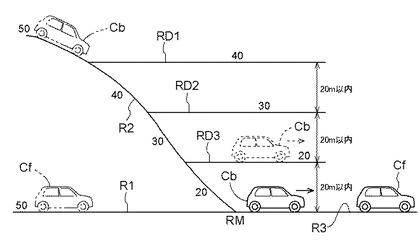
この積算状況を、図14に基づいて説明する。
この図は、走行路R1,R2が合流する状態であることを示しており、図上、下側に位置する第一走行路R1は、一本道から合流点RMに到達している。上側に位置する第二走行路R2は、左上方向から第一走行路R1との合流点RMまで、順次、分岐を繰り返している。これら分岐路を上から順に、RD1,RD2、RD3と図示している。
さらに、分岐路RD1,RD2、RD3間及び、分岐路RD3と合流点RMより下手側の第一走行路R1の距離は、20m以内としている。
【0115】
この場合における総得点の変化を、図上の対応部位に示した。
第一走行路R1に関しては、一本道であることから、この走行路R1を走行している車の総得点は50点とされる。一方、第二走行路R2に関しては、左上側において一本道であったため総得点が50点であったのが、分岐RDの繰り返しに伴って、20点まで自信度が低下して、合流点RMに到達する結果となっている。
【0116】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、この例の場合も、自信度は、走行状態にある車において、常時、決定された自信度が保持されることとなる。
【0117】
車間状態確認手段11は、カメラ8等から得られる撮像情報に基づいて、画像認識により自車Ciと他車Coとの間における例えば、実際に走行している走行路Rの関係を確認する。例えば、撮像情報に現れた他車Coと路肩或いは白線との関係から、相互の車Ci、Coが走行している走行路Rの状態を確認することができる。先に示した図5、図6に示される状況では、自車Ci及び他車Coは、同一の白線対内に存在する撮像が得られるため、同一走行路にいることが確認できる。
よって、他車Coの自信度が、自車Ciの自信度より高い場合に、他車Coが認識している走行路の情報と、この車間状態確認手段11により得られる情報を利用して現在の自車の走行路を補正・決定できる。
【0118】
この例の場合、第二の実施形態における走行レーンに関する情報が、認識走行路に関する情報となり、第二の実施形態と同様なシーケンスを経ることで、自車Ciと他車Coとの自信度の比較を行い、認識走行路の補正・決定において、他車Coの認識走行路を使用するか、自車Ciの認識走行路を使用するかの判断を行い、他車Coの自信度が高い場合に、他車Coの認識走行路に基づいて自車Ciの認識走行路を補正・決定することができる。
【0119】
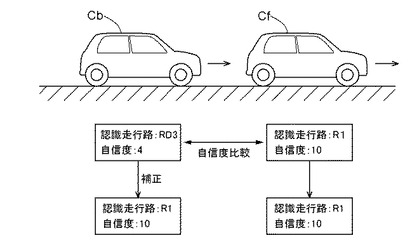
この状態を示したのが、図14、図15であり、合流点RMの走行下手側において、先行車Cfと後行車Cbとの間で、認識走行路の補正・決定を行う状況を示している。
この状況では、後行車Cbが第二走行路R2から第一走行路R1に合流した状態で、後行車Cbの自信度が分岐の存在で低下する(図15の上側箱内参照)。
後続車Cbとしては、実線で合流点RM下手側に、破線で分岐路RD3上に図示するように、第一走行路R1に進入したのか、第三分岐路RD3に進入したのかが、確定できない状況である。
この状況においても、先行車Cfと後行車Cbとの間で自信度の比較を実行し、先行車Cfの自信度が高い場合は、同一の走行路R1を走行していることが確認できたことを条件として、後行車Cbの認識走行路を先行車Cbの認識走行路として精度の高いものとできる。
【0120】
一方、図14に破線で示すように、後行車Cbが、分岐路RD3に進入している状況では、車間状態確認手段11が、先行車Cfが斜め前の並走路である第一走行路R1を走行していることを確認することで、後行車Cbが分岐後に並行路RD3を走行している状況を確認できる。
〔別実施の形態〕
(1) 上記の実施の形態では、走行路に沿った自位置の認識を実行する自位置認識手段として、3種の手段41a、41b、43cの全てを有する構成に関して説明したが、何れか一種以上を有する構成であってもよい。自位置認識手段を単一しか有しない場合は、自車情報依存補正手段は、備える必要がない。但し、本願の趣旨から、他車情報依存補正手段は必然的に備えられることとなる。
(2) 自信度の演算に関しては、表1、3、4に示すような事象要因に伴って、得点を積算して、総得点から、自信度を演算するものとしたが、このような手法を採ることなく、例えば自位置を決定する方式に基づいて、自信度を演算・決定するものとしてもよく、任意の手法で自信度を得ることができる。
(3) 上記の実施の形態では、走行路に沿った方向での自位置の認識・決定の後、その場所での地図情報を利用した走行レーンの認識・決定、或いは、認識走行路の認識・決定を行うものとしたが、走行レーンの履歴、認識走行路の履歴等を利用して、走行レーンのみを単独で、あるいは、認識走行路を単独で認識・決定するものとしてもよい。
(4) 上記の実施の形態にあっては、車車間通信は、車車間で直接行われる例を示したが、通信は最終的に、送信車両から受信車両へ行われればよく、例えば、通信センター等を介する間接的な形態で行われてもよい。
【産業上の利用可能性】
【0121】
他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得ることができた。
【図面の簡単な説明】
【0122】
【図1】第一の実施形態に係る自位置認識システムの構成を示す図
【図2】地図データベースの構造を示す図
【図3】第一の実施形態における総得点の変化を示す説明図
【図4】第一の実施形態に係る自位置認識システムの処理フローを示す図
【図5】第一の実施形態で、他車の自位置を補正に使用する場合の説明図
【図6】第一の実施形態で、補正を行わない場合の説明図
【図7】第二の実施形態に係る自位置認識システムの構成を示す図
【図8】走行レーン認識の説明図
【図9】第二の実施形態における総得点の変化を示す説明図
【図10】第二の実施形態に係る自位置認識システムの処理フローを示す図
【図11】第二の実施形態で、他車の自位置を補正に使用する場合の説明図
【図12】第二の実施形態で、補正を行わない場合の説明図
【図13】第三の実施形態に係る自位置認識システムの構成を示す図
【図14】第三の実施形態における総得点の変化を示す説明図
【図15】第三の実施形態に係る後続車の自位置を補正に使用する場合の説明図
【符号の説明】
【0123】
1 自位置認識システム
4 演算制御装置
5 自律航法センサ
6 GPS受信機
8 カメラ(撮像手段)
9 車車間通信モジュール(車車間通信手段)
10 車間距離検出モジュール(位置関係検出手段)
11 車間状態確認手段(位置関係検出手段)
41 自位置認識部
42 自位置決定部
43 自信度決定部
44 自信度比較部(自信度比較手段)
Ci 自車
Co 他車
DB データベース
DBm 地図データベース
DBc 自信度演算データベース
【技術分野】
【0001】
本発明は、ナビゲーション装置等に採用される自位置認識システムに関する。
【背景技術】
【0002】
自位置の正確な認識は、ナビゲーション装置、走行制御装置等にとって非常に重要な事項である。
自位置の認識システムとしては、所謂、自律航法システムが知られているとともに、GPS情報等の他者からの情報に基づいて自位置を認識する他律航法システムも知られている。さらに、走行路に沿って位置される地物(例えば、交差点にある停止線・走行路に沿って引かれている白線(実線・破線等を含む))等を、撮像情報から認識し、これら地物の位置から自位置を認識するシステムも採用されつつある。
これら3種のシステムは、基本的に自車側で検出可能な情報から自位置を認識・決定するシステムである。
【0003】
一方、自車以外の他車の有する情報から自位置を認識・決定しようとするシステムも提案されている。
特許文献1に開示される技術がこの種の技術であり、この文献に開示の技術では、前方車の位置情報に基づいて、後方車は自位置を認識・決定する。この技術では、他車の情報を利用することで、一群の車両の位置関係を良好に認識できる。
【0004】
【特許文献1】特開平9−245287号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、自車が検出できる情報のみを基準として自位置を決定しようとすると、それらシステム固有の認識限界を超えることはできない。
例えば、自律航法センサから得られる情報から、自車の移動軌跡を逐次演算して逐次自位置を認識するシステムでは、走行距離の増加に伴って認識誤差が蓄積され、その確からしさが走行距離の増加に伴って低下することがよく知られている。
GPS情報等を使用する他律航法の場合は、GPS情報から得られる位置情報の精度限界が、確からしさの限界となる。
一方、地物の位置から自位置を認識するシステムにあっては、地物が存在する位置において自位置認識を行うため、その精度は高く、確からしさをかなり高いものとできるが、自位置認識に使用できる地物が常時、走行路に沿って存在するわけではない。
【0006】
そこで、先にも示したように、他車の位置情報を自位置の認識に使用することが試みられるようになっている。例えば、特許文献1に開示されている技術は、前方車両の持つ位置情報を後方車両が自車の自位置の認識に使用しようとするものであるが、使用しようとする前方車両の自位置の確からしさ、精度に関しては、何ら考慮されていない。
【0007】
従って、前方車両の位置情報、車間距離とで一意的に自車の位置補正を行うと、前方車両の位置情報の精度が必ずしも高いものとは限らず、良好でない前方車両の位置情報から自車の自位置を認識・決定することとなり、自位置認識の精度が悪化してしまう。
【0008】
本発明の目的は、他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得ることにある。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明に係る、
各車両に、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段とを備え、
車両間で情報通信を行う車車間通信手段を備える自位置認識システムの特徴構成は、
各車両に、自位置の確からしさの指標である自信度を演算する自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成されるとともに、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行うものである。
【0010】
この自位置認識システムにおける自位置の認識方法は、以下の手順を経るものとなる。
即ち、各車両で、自位置の認識を行う自位置認識工程と、前記自位置認識工程で認識される自位置を補正する自位置補正工程とを実行し、
車両間で情報通信を行う自位置認識方法の特徴手段は、
各車両で、自位置の確からしさの指標である自信度を演算する自信度演算工程を実行し、
送信車両から受信車両に、送信車両の自位置及び自信度を送信し、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出工程を実行し、
前記送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較工程を実行し、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記自位置補正工程において、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行うのである。
【0011】
このシステムでは、送信車両と受信車両との両方の車両で、自ら認識する自位置の自信度が求められる。即ち、自ら自位置と認識している認識自体の確からしさの指標である自信度が、各車両で保有される。ここで、自位置としては、後に実施の形態で示すように、走行路に沿った方向での位置、走行路の巾方向の位置、或いは、走行していると認識している走行路自体(走行路識別名等で識別された走行路)であったりする。
【0012】
そして、このシステムでは、送信車両から受信車両に、送信車両が認識している自位置及びその自信度が送信される。そして、先ず、自信度間の比較が実行される。このようにすることで、送信車両側と受信車両側との間で、自信度の高い側の車両が何れの車両かが判明する。そして、本願にあっては、自信度が高い側の車両の自位置を基準に、受信車両の自位置が補正される。この時、送信車両と受信車両との位置関係は、別途求めることとしておき、送信車両が認識している自位置と車両間の位置関係とに基づいて、受信車両の自位置を求める。結果、受信車両の自位置を精度の高いものとできる。
【0013】
従って、このシステムでは、各車両が認識している自位置と、その自位置の確度(信頼性)に基づいて、車両群を成す各車両の自位置を補正・決定するため、位置精度が高いものとなり、自位置に関する情報を使用するナビゲーション、走行制御等を従来より的確なものとできる。
【0014】
このシステム構成で採用される送信側の車両に搭載されるべきシステム構成は、以下の構成となる。
即ち、送信側のシステムである自位置認識用送信システムは、
自位置の認識を行う自位置認識手段、前記自位置認識手段により認識される自位置を補正する補正手段、及び車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、受信車両に、自車の自位置及び自信度を送信可能に構成されているものとなる。
【0015】
一方、受信側であり、自位置の補正を状況に応じて行う自位置認識用受信システムの構成は、これが、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段及び、車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から送られてくる送信車両の自位置及び自信度を受信可能に構成されるとともに、自車に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、自車が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、自車の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正するものとできる。
【0016】
さて、以上の構成の自位置認識システムにおいて、
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係であることが、好ましい。
【0017】
この構成を採用することで、自位置は走行路に沿った方向で認識され、受信車両の走行路に沿った自位置認識を、良好に行える。
この認識を行う手段では、前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係であることとなる。
【0018】
さらに、上記の走行路に沿った位置認識を行うシステムにおいて、
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正することが、好ましい。
【0019】
この構成のシステムでは、前後方向に位置する車両間で、後方車両側の自位置認識を良好に行える。
【0020】
このシステムの特徴手段は、前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正することとなる。
【0021】
以上説明してきた構成において、前記自位置認識手段が、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成されることが好ましい。
これら一種以上の情報に基づいて、自位置認識手段が自位置を認識することで、自車で得られる情報に従った自位置の認識を実行できる。
【0022】
さて、以上の説明は、認識対象の自位置が、走行路に沿った位置として認識される場合を対象としたが、自位置の認識としては、自車がどの走行路を走行しているかの認識を行う場合もある。以下の説明は、認識の対象が走行路となる場合の例である。
【0023】
即ち、前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係であることが、好ましい。
【0024】
このシステムでは、自位置を走行路単位で認識し(本願にあっては、このようにして認識される走行路を認識走行路と呼ぶ)、自信度を、この認識の確からしさに係る指標とし、さらに、相対位置関係として、各車両が走行している走行路間の関係を相対位置関係でとして求めることで、送信車両の認識走行路から受信車両の認識走行路を補正・決定することができ、走行している走行路の特定を良好に行える。
この種の走行路の認定は、例えば、並行に走っている並行路が存在し、並行路間で走行している走行路の特定が困難を伴う場合に有効な認識判定技術を与えることができる。
【0025】
この場合、特徴手段としては、前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係であるとして、認識方法は成立する。
【0026】
さらに、前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正するものとすることが好ましい。
このようにすることで、自車周りに存する周囲車両の保有する情報を利用して、自信度が高い、自車が走行している走行路を特定する情報である認識走行路情報を得ることができる。
【0027】
この場合、特徴手段は、前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正することとなる。
【0028】
この場合も、前記自位置認識手段としては、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成されるものとできる。
【発明を実施するための最良の形態】
【0029】
以下、本発明の実施の形態に関して、図面を使用して説明する。
本明細書にあっては、認識対象となる自位置が、車が走行路に沿って走行している状況における走行方向に沿った走行路上の位置である第一実施の形態、走行方向に対してその巾方向での位置であり、具体的には走行レーンrを認識する第二実施の形態、並行路等、複数の走行路を自車が走行していると認識される可能性がある状況において、実際に走行している走行路がどの走行路であるかを認識対象とする第三実施の形態に関して、順に紹介する。
第二実施の形態、第三実施の形態は、それぞれ、第一実施の形態で実行可能な走行路に沿った方向での自位置の認識機能に加えて、走行路巾方向の認識、走行路自体の認識が可能となっているため、第二実施の形態、第三実施の形態の説明では、追加的な機能に関して説明する。
【0030】
これらの実施の形態において、自位置補正の実行に際して、自車Ci内で、予め自位置が認識されているとともに、この自位置の自信度が求められており、他車Coから、他車Coが認識している自位置とその自信度とを受信して、先ず、自信度間の比較を行い、他車Coの自信度が自車の自信度より高い場合にのみ、他車Coの自位置に基づいて自車Ciの自位置を補正行う点において、共通する。
【0031】
1 第一実施の形態
この実施の形態は、認識対象となる自位置が走行方向に沿った走行路R上の位置である例であり、例えば、図5、図6に示すように、紙面上下方向における走行路R上の位置を認識する例である。これらの図は、走行路Rを下から上に車が走行している状態を示している。
図上、上側に図示される車が、これまで説明してきた他車Coに相当し、下側に図示される車が、自車Ciに相当する。従って、これらの例では、下側に図示される自車Ciにおいて、他車Coからの自位置情報に基づいて、自位置の補正を行うか否かが問題となる。
【0032】
この実施形態における、自車側の自位置認識システム1の形態を図1に示した。
自位置認識システム1は、自車Ciの自位置を決定するためのシステムとして構築されており、この自位置認識システム1により求められた自位置の情報が、ナビゲーション情報を生成するためのナビゲーション装置本体2、あるいは走行制御を行うための走行制御装置3に送られ、適確に使用される。
【0033】
ナビゲーション装置本体2にあっては、例えば、自位置の情報は、現在の正確な自位置に基づいて、新たなルート探索、案内に使用されるとともに、地図上に現在位置を正確に表示するのに使用される。
走行制御装置3では、例えば、前方に停止線があり、自車Ciが停止の必要がある場合に、適確な減速制御を行うために使用される。
【0034】
自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された種々の附属機器を備えて構成されている。
【0035】
演算制御装置4には、自律航法センサ5からの検出情報が取り込み可能に構成されている。この自律航法センサ5は、具体的には自車の向いている方位を検出するための方位センサ5aと、例えば、ドライブシャフトといった、車輪に連結されている回転体の回転数から車両の走行距離を求める距離センサ5bとを備えて構成されている。
自律航法センサ5からの検出情報は、自車の移動軌跡の演算に使用される。即ち、予め設定されている特定の時間間隔間で、距離センサ5bから判明する走行距離分だけ、方位センサ5aにより検出された方位に移動したものとして、自車の移動軌跡を求めていくことで、逐次的に自位置を求めることができる。
【0036】
演算制御装置4には、GPS受信機6が接続されており、逐次、GPS衛星7から送られてくるGPS情報を受信して、演算制御装置4内で、このGPS情報から、GPS情報に基づいた自位置の認識が可能となっている。GPS情報に基づいて求められる自位置は、経度及び緯度の組み合わせとして得られる情報である。
【0037】
演算制御装置4には、前方カメラ8a及び後方カメラ8bからの撮像情報である画像情報が入力されるように構成されており、画像認識により、それぞれのカメラ8の撮像範囲内にある例えば地物Mを認識可能に構成されている。図8(b)が、前方カメラ8aにより撮像された画像の例である。
【0038】
演算制御装置4には、車車間通信モジュール9(車車通信手段の一例)が接続されており、このモジュール9から車車間通信により受信された情報が入ってくるように構成されている。本願にあっては、この車車間通信で通信の対象となる情報は、他車Coである送信車両の自位置の情報およびその自信度である。
【0039】
演算制御装置4には、車間距離検出モジュール10(位置関係検出手段の一例)が接続されており、この車間距離検出モジュール10から、自車Ciに対する送信車両Coの相対位置情報が入ってくるように構成されている。図5、図6に示す例においては、車間距離検出モジュール10は、前方車両Coとの間の車間距離を検出する。即ち、走行路Rにおいて、その走行方向前方に存する送信車両Coと自車Ciとの間の車間距離が演算制御装置4に入力される。
【0040】
演算制御装置4には、データベースDBが備えられており、このデータベースDBとして、地図データベースDBmと自信度演算データベースDBcが備えられている。このデータベースDBは、例えば、ハードディスクドライブ、DVD−ROMを備えたDVDドライブ、CD−ROMを備えたCDドライブ等のように、情報を記憶可能な記録媒体とその駆動手段とを有する装置をハードウエア構成として備えている。
地図データベースDBmは、地図情報を格納したデータベースである。図2は、地図データベースDBmに格納されている地図情報の内容を示す説明図である。この図に示すように、地図データベースDBmには、地図情報として、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
道路ネットワークレイヤL1は、走行路Rである道路間の接続情報を示すレイヤである。具体的には、緯度及び経度で表現された地図上の位置情報を有する多数のノードNの情報と、2つのノードNを連結して道路を構成する多数のリンクLの情報とを有して構成されている。また、各リンクLは、そのリンク情報として、道路名、道路の種別(高速道路、有料道路、国道、県道等の種別)やリンク長さ等の情報を有している。
道路形状レイヤL2は、道路ネットワークレイヤL1に関連付けられて格納され、道路の形状を示すレイヤである。具体的には、2つのノードNの間(リンクL上)に配置されて緯度及び経度で表現された地図上の位置情報を有する多数の道路形状補完点Sの情報と、各道路形状補完点Sにおける道路幅Wの情報とを有して構成されている。
【0041】
地物レイヤL3は、道路ネットワークレイヤL1及び道路形状レイヤL2に関連付けられて格納され、道路上及び道路の周辺に設けられた各種地物の情報を示すレイヤである。この地物レイヤL3に格納される地物Mの情報としては、少なくともカメラ等で撮像可能な画像認識の対象となる地物Mが、その関連情報とともに格納されている。
具体的には地物Mとして、道路の路面に設けられたペイント表示の地物Mp、道路に沿って設けられた各種の道路標識Mfや信号機Ms等の立体物の地物等の各種の地物についての情報が地物レイヤL3に格納されている。ここで、ペイント表示には、例えば、車線を分ける白線(実線、破線、中央線等の区画線の種類の情報も含む。)、ゼブラゾーン、停止線、横断歩道、各レーンの進行方向を指定する進行方向別通行区分表示、速度表示等が含まれる。また、正確にはペイントによるものではないが、同じく道路の路面に設けられるマンホールもここではペイント表示に含めてもよい。また、立体物としては、各種の道路標識や信号機のほか、ガードレール、建物、電柱、看板等の道路上又は道路の周辺に設けられる様々な立体物が含まれる。
【0042】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、地物レイヤL3に様々な地物Mがその位置とともに登録されているため、先に説明したカメラ8により撮像される画像内に特定の地物Mが撮像された場合に、その地物Mの地図データベースDBmに登録された位置と、画像から判明する地物Mと自車Ciとの位置関係から、自車Ciの位置(絶対座標位置)を認識することができる。
【0043】
自信度演算データベースDBcは、得点データベースDBc1及び自信度換算データベースDBc2を備えて構成されている。
得点データベースDBc1は、以下の表1に示すように、自位置の認識のタイミングで、加算又は減算される得点(表1左欄に示す)と、その得点の事例要因(表1右欄に示す)との関係を纏めたデータテーブルである。得点の加算及び減算は、左欄に示されるプラスマイナスで決まる。
【0044】
【表1】
【0045】
表1に示す事例要因に関して例示的に説明しておくと、「道路上の地物を認識し位置補正が成された直後」に、得点が50点加算される。これは、地物Mの認識を行って位置補正をすると、その確からしさが最も増す状況となるためである。
一方、「地物認識位置補正後10m毎」に得点は5点ごと減算される。この状況は、地物認識で位置補正をした後、通常の自律航法で自位置を認識しながら走っている状況では、走行距離に応じて自信度が低下することに対応している。
GPSの受信状況に関しては、その受信状況が比較的良好な場合は、比較的高い得点を与えることができる(20点加算)が、悪い場合は、得点に変化がない(0点加算)ことを示している。
交差点右左折直後、カーブでの補正後には、それらの地点情報に基づいて、ある程度の得点を与えることができる(前者で20点加算、後者で10点加算)。一方、トンネル内において、自信度は低下する(10点減算)。さらに、カメラ等の画像認識システム、GPS受信機の故障等により自信度が低下する(前者で40点減算、後者で30点減算)。
【0046】
自信度換算データベースDBc2の構造を表2に示した。
この表は、得点の積算値として得られる総得点(表2右欄)と自信度(表2左欄)との関係を示したものであり、総得点が高いほど、自信度が高く設定されていることが判る。
【0047】
【表2】
【0048】
以上が、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図1からも判明するように、この装置4には、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0049】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置の認識を実行する機能部であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い自位置を補正・決定する機能部である。
一方、自信度決定部43は、上記のようにして決定される自位置に関する自信度を演算する機能部であり、自信度比較部44は、車車間通信モジュール9を介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定部42において、他車情報依存の補正を行い、自位置を決定するべきか否かの判定を行う機能部である。
【0050】
この例にあっては、自位置認識部41には、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられている。
第一自位置認識手段41aは、自律航法により自位置を求める手段であり、方位センサ5a及び距離センサ5bからの情報に基づいて、自車の移動軌跡を順次、自位置の認識処理タイミング毎に求め、自位置を認識する手段である。
【0051】
第二自位置認識手段41bは、GPS衛星から所定のタイミングで受信されるGPS情報に基づいて、自位置を認識する手段である。
【0052】
第三自位置認識手段41cは、カメラ8等の撮像情報と、地図データベースDBm内に記憶されている地物Mの情報とを対比し、同一の地物Mが撮像画像内に認められた場合に、その地物Mの位置情報に基づいて自位置を認識する手段である。この手段による自位置認識は、地物Mの存在を前提とするため、地物Mが存在する地点に自車が到達したタイミングにおいてのみ、認識が行われる。
【0053】
自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。
【0054】
自車情報依存補正手段42aは、過去に決定された自位置に対して、新たな自位置が自位置認識部41で認識された場合に、新たな認識情報に基づいて、現在の自位置を補正・決定する機能手段である。即ち、自位置認識部41に備えられる、それぞれの自位置認識手段41a,41b,41cは、一定のタイミング(第一自位置認識手段41aは一定の時間間隔毎、第二自位置認識手段41bはGPS情報の取り込みタイミング毎、第三自位置認識手段41cは自位置認識に使用可能な地物が画像認識される毎)で、自位置を認識するが、この決定手段42aにあっては、原則的には、第一自位置認識手段41aにより認識される自位置を補正・決定に使用しながら、第二、第三の自位置認識手段41b,41cにより認識された自位置が存在する場合は、第一自位置認識手段41aにより認識される自位置より後者手段により認識される自位置ほど優先して、自位置を補正・決定する。
【0055】
即ち、本例の場合、後者側ほど、自位置認識の確からしさが高いため、後者側の情報を優先して自位置の補正・決定に使用する。ここで、自位置認識の頻度は、前者側ほど高いため、第二、第三自位置認識手段41b,41cで、自位置認識が行えない状況にあっては、自律航法に基づいて認識された自位置が自動的に使用される。
このようにすることで、自車情報依存補正手段42aにおいては、常時、自車で得られる情報から自位置が補正・決定される。
【0056】
他車情報依存補正手段42bは、本願独特の補正手法を実行する機能手段である。
この手段は、自車情報に基づいて自車情報依存補正手段42aにより決定された自位置に対して、他車Coの自位置が受信され、他車Coの自位置についての自信度が高いことを条件として、他車Coの自位置を基準として自車Ciの自位置を補正・決定する。
この他車情報依存補正手段42bへは、他車Coの自位置と、自車Ciと他車Coとの車間距離が入力される。そこで、この手段42bでは、他車Coの自位置を基準として、車間距離だけ離れた位置を自位置として求める。
このようにして求められた自位置は、自車情報依存補正手段42aにより決定された自位置に対して優先するものとされ、この手段42bが働く場合は、他車情報依存補正手段42bにより決定された自位置が、現在の自位置として決定される。
このように決定してよい理由は、この他車情報依存補正手段42bに位置決定に必要な情報が送られ、この手段における処理を実行する段階にあっては、自信度比較部44において他車Coの自信度が自車Ciの自信度より高いとの判定結果がでている状態だからである。
【0057】
自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部42において自位置決定が行われる毎に、その決定状況を判定し、決定状況が得点の加算・減算に相当する状況である場合には、表1に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。同時に、常時実行されている自律航法による自位置の決定が行われると、表1に示すように、地物認識位置補正後、10mの走行毎に、5点の減算を行う。
この総得点には、その上限値(例えば100点)と下限値(例えば−100点)が設けられており、特定事象が連続して起こっても総得点は、一定の範囲内に収まるように構成されている。
【0058】
この積算状況を、図3に基づいて説明する。
図3において、上図は車Cの走行状態を示しており、下図は上図に示す走行が行われた場合の総得点(得点積算値)の変化を示したものである。
上図は、車Cが右側から左側へ走行する状況を示したものであり、走行方向に、自位置を認識可能な地物Mである横断歩道Xがあり、その先にトンネルTがある状況を示している。一方、下向きの矢印は、矢印が記載されている位置で、自位置の決定が逐次なされたことを示している。この例では、最初に地物Mである横断歩道Xにより、自位置が認識・決定され、以降、自律航法による自位置認識状態がしばらく継続し、その間、2回、GPS情報が受信されて、GPS情報に基づく自位置認識、補正を行った後、トンネルTに到達している。
【0059】
総得点の変化は、最初、総得点が0であるとして、先ず地物Mによる自位置の認識である横断歩道Xを利用した自位置認識が行われた時点で50点の加算がおこなわれる。その後、自律航法状態で、総得点は逐次減少していくが、GPS情報を利用した自位置認識が行われた時点毎に20点の加算が行われ、総得点は、図示する様なのこぎり歯状の変化となる。トンネルTに突入することで、その進入時に10点が減算されることを示している。
【0060】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、走行状態にある車において、常時、演算された自信度が保持される。
【0061】
以上が、この実施形態における演算制御装置4の構成の説明であるが、以下、図4、図5、図6に基づいて、走行方向に沿った走行路上での位置の補正に関して説明する。
説明においては、自車Ci及び他車Coの存在を前提とするが、両車Ci,Coは、自位置の認識、補正・決定を可能とする機能部、補正・決定した自位置の自信度を演算する機能部、車車通信モジュール9が備えられている。さらに、自車Ciには他車Coとの車間距離を検出するための車間距離検出モジュール10が備えられている。
図5、図6は、他車Coが先行して横断歩道Xがある位置に到達した状況を示しており、自車Ciは、他車Coに後続する状態で、他車Coに近接しようとしている。従って、他車Coは送信車両となり、自車Ciは受信車両となる。
図5、図6とは、ともに他車Coが地物Mである横断歩道Xに近づいた状況を示しているが、図5に示す状態では、地物認識が良好に行われ、横断歩道Xの位置を基準として他車Coの自位置が良好に決定された状況を示している。従って、他車Coの自信度は2から10に変更されている。
一方、図6に示す状態では、地物認識が良好に行われなかったため、横断歩道Xの位置を基準として他車Coの自位置が良好に決定されなかった状況を示している。従って、他車Coの自信度は2のままである。
【0062】
この状態から、自車Ciと他車Coとの間における車車間通信を利用しての自車Ciの自位置の補正・決定が実行される。
図4は、この状態における自車Ciにおける処理フローを示したものである。
以下、このフローに従って、説明を進める。
処理の開始に伴って他車Co(前方車両)の情報を取得する(ステップ1)。このとき取得される情報には、他車Coの識別番号、車種、通信形態等が含まれる。他車Coの情報の取得ができず、他車Coの認識が行えない場合(ステップ2:no)は、情報取得を繰り返す。情報の取得ができ、通信を確立できた場合(ステップ2:yes)は、他車Coの自信度を取得する(ステップ3)。
そして、自信度比較部44で、他車Coと自車Ciとの自信度を比較する(ステップ4)。比較の結果、他車Coの自信度が自車Ciの自信度より高い場合(ステップ4:yes)は、他車Coの自位置の情報に基づいて自車Coの自位置を補正する処理に移る(ステップ5〜8)。
【0063】
一方、比較の結果、他車Coの自信度が自車Ciの自信度より低い場合(ステップ4:no)は、ステップ1に戻り、他車Coの自信度が自車Ciの自信度を上回るまで、ステップ1〜4の処理を繰り返す。この状況が、図6に示される状況であり、この図では、後続車である自車Ciの自位置が他車の情報に従って補正されることはない。
【0064】
図5に示すように、自車Ciの自信度が他車Coの自信度より低い場合の処理は、以下の処理を順次実行する。即ち、他車Co(前方車両)の自位置の情報を取得する(ステップ5)。そして、車間距離検出モジュール10により、他車Coと自車Ciとの車間距離を検出し、取得する(ステップ6)。引き続いて、他車情報依存補正手段42bは、このようにして得られる他車Coの自位置と車間距離から自車Ciの自位置を求め、得られた自位置を現在の位置として自車Ciの自位置を補正・決定する(ステップ7)。この補正が良好に完了した場合は、自位置の補正・決定処理を完了し(ステップ8:yes)、何らかの理由で完了できなかった場合は、ステップ5に戻って処理を実行する。完了した場合、自車Ciの自位置認識の自信度は、他車の自信度に置換する。
この状況が図5に示した状況であり、自車Ciの自信度が5から10に変更されている。
【0065】
2 第二実施の形態
この実施の形態は、認識対象となる自位置が走行方向に対してその横方向での走行路上の巾方向の位置(具体的には走行レーンr)である例であり、図11、図12に示すように、走行レーンrを認識、補正・決定する例である。これらの例でも、図上、上側に図示される車が他車Coに相当し、下側に図示される車が自車Ciに相当する。従って、下側に図示される自車Ciにおいて、他車Coからの自位置に関する情報(走行レーンの情報)に基づいて、自車Ciの走行レーンrの補正を行うか否かが問題となる。
【0066】
この実施形態のシステム形態を図7に示した。
本システムから得られる走行レーン情報は、先の例と同様に、ナビゲーション装置本体2あるいは走行制御装置3に送られて、的確なナビゲーション、走行制御に使用される。
【0067】
この例にあっても、自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された附属機器とを備えて構成される。
【0068】
演算制御装置4には、先の例と同様に、自律航法センサ5、GPS受信機6、前方カメラ8a及び後方カメラ8bが接続されており、それぞれの機器からの検出情報が入力される。車車間通信モジュール9が接続されていることも先の例と同様である。
【0069】
先の例では、自車Ciと他車Coとの車間距離を検出するための車間距離検出モジュール9が設けられていたが、それに加えて、制御演算装置4内に、前方カメラ8a等の撮像装置からの情報である撮像情報から、画像認識処理により自車Ciと他車Coとの位置関係である車間状態を確認する位置関係検出手段としての車間状態確認手段11が備えられている。この手段11の構成に関しては、後に詳述する。
【0070】
演算制御装置4には、データベースDBが備えられており、このデータベースDBには、地図データベースDBmと自信度演算データベースDBcが備えられている。
地図データベースDBmは、先の例で示したと同様に図3に示すように階層化された構成を採用されており、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
【0071】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの走行路Rに沿った位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、地物レイヤL3に様々な地物Mがその位置とともに登録されているため、カメラ8により撮像される画像情報内に特定の地物Mの画像が含まれている場合に、その地物Mの位置情報から、自車Ciの位置(走行レーンr)を認識することができる。この実施の形態では、自車Ciが走行している走行レーンrを問題とするため、特に、路肩の位置、車線を分ける白線(実線、破線、中央線等)等の登録情報が利用される。
【0072】
即ち、図8(b)に示すように、カメラ8等から得られる撮像情報における路肩G1iの位置、車線を分ける白線(実線G2i、破線G3i、中央線G4i等)の位置と、現在の自車Ciの位置において、地図データベースDBmから得られる地物Mに関する情報である、図8(a)に示すおける路肩G1dの位置、車線を分ける白線(実線G2d、破線G3d、中央線G4d等)の位置との比較により、自車Ciの走行レーンrを認識することができる。この走行レーンrの認識に関しては、第四自位置認識手段41dにおいて説明する。
【0073】
自信度演算データベースDBcは、先の例と同様に、得点データベースDBm及び自信度換算データベースDBcを備えて構成されている。
得点データベースDBmは、走行路巾方向の自位置認識に関しては、以下の表3に示すように、走行レーンの認識タイミングで、加算又は減算される得点(表3左欄に示す)と、その得点の事例要因(表3右欄に示す)の関係を纏めたデータベースである。得点の加算及び減算は、左欄に示されるプラスマイナスに依存することとなる。
【0074】
【表3】
【0075】
表3に示す事例要因に関して例示的に説明しておくと、「路肩、白線等々を良好に認識」できた場合に、得点が50点加算されることを示している。これは、地物の認識が確実に行われているため、正確に走行レーンが判別できる状況にあるためである。
一方、「跨ぎ判定を行い、路肩は認識、白線は未認識」の場合は、得点が30点加算されることを示している。さらに、「跨ぎ判定はできなかったが、白線を良好に認識」した場合は、得点が20点加算されることを示している。ここで、跨ぎ判定とは、後述する第四自位置認識手段41dにおいて白線を跨ぐ走行が行われた否かに基づいて行われる判定である。この判定の可否、及び路肩、白線等の認識の可否に基づいて、走行レーン認識の確からしさは、同表に示すように低くなる。
さらに、「4レーン以上の道路走行時、左右レーン白線が破線で、跨ぎ判定が行われない」状況では、得点が与えれることはない。
跨ぎ、白線、路肩の認識ができない状況では、できなくなった段階から10m走行毎に、得点5点が減算される。
さらに白線のない道路を走行している状況では、得点20点が減算される。
その他、それぞれに状況に応じて、得点の加算及び減算を行うように得点が決定されているのは、先の例と同様である。
【0076】
自信度換算データベースDBc2の構造は先に示した表2と同様であり、その使用形態も同様である。
【0077】
以上が、この例において、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図7からも判明するように、この例にあっても、この装置4内に、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0078】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置(この例の場合は走行レーン)の認識をも実行する機能部であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い走行レーンをも決定する機能部である。
一方、自信度決定部43は、上記のようにして決定される走行レーンrに関する自信度をも演算する機能部であり、自信度比較部44は、車車間通信モジュールを介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定手段43において、他車情報依存の補正を行うか否かの判定情報を得る機能部である。
【0079】
自位置認識部41には、先に説明した、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられているほか、第四自位置認識手段41dが備えられている。
第一、第二、第三自位置認識手段41a,41b,41cの機能は、走行方向に沿った自位置を認識する上で、先の第一実施の形態の場合と同様であり、説明を省略する。
【0080】
第四自位置認識手段41dは、現在、走行している走行レーンrを認識する機能部であり、この機能を果たす走行レーン決定手段411を備えている。この走行レーン決定手段411に対する補助手段として跨ぎ判定手段412が備えられており、この跨ぎ判定手段412による判定結果が、走行レーン決定手段411による走行レーンrの決定に使用できるように構成されている。
【0081】
走行レーン決定手段411は、基本的には、カメラ8等からの画像情報と、地図データベースDBm内に記憶されている地物情報とを対比し、同一の地物Mが認識された場合に、その地物Mの位置情報(具体的には画像情報内で認識される白線の位置関係)に基づいて、現在の走行レーンrを認識する手段である。この手段による自位置認識は、地物Mの存在を前提とするため、地物Mが存在する地点にいるタイミングで、認識が行われる。
【0082】
この第四自位置認識手段41dによる処理は、走行方向を横断する方向での処理である。従って、走行方法に沿って決定された自位置を利用して、地図データベースDBmからその地点の道路状況に対応した地物M(路肩G1d、実線G2d、破線G3d、中央線G4dの種別、配置等)の情報を抽出し、図8に示すように、地図情報側から得られる情報(図8(a))と、画像情報から得られ情報(図8(b))とを比較する。そして、自車Ciが特定の走行レーンrにあるとした場合に撮像されるべき撮像情報と、現実に撮像された画像情報を比較対照することで、その一致度が高い場合に、その走行レーンrを自車が走行している走行レーンrを割り出すことができる。この図8では、自車Ciが左レーンを走行している状況を示している。
【0083】
この第四自位置認識手段41dには、さらに、所謂、跨ぎ判定手段412が備えられている。この判定手段412は、逐次得られる画像情報を逐次監視することで、自車Ciにより区画線の跨ぎが行われた否かを、その跨ぎ方向とともに監視する。そして、所定方向での跨ぎが行われたと判断された場合には、現在認識している走行レーンrから、移動方向にレーン間の跨ぎが行われたとして、跨ぎ後の走行レーンrを現在の走行レーンとして認識する。
【0084】
この例にあっても、自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。走行路Rに沿った自位置に決定は、第一の実施の形態と同様に行われるため、以下の説明では、走行レーンrの決定に関してのみ説明する。
【0085】
自車情報依存補正手段42aは、過去に決定された走行レーンrに対して、新たな走行レーンrが自位置認識部41で認識された場合は、新たな走行レーンrに現在の走行レーンrを補正する。この例では、自位置認識部41に備えられる第四自位置認識手段41dによる認識結果が、走行レーンrの決定に、実質上、そのまま使用される。
このようにすることで、常時、逐次的に、自車側で得られる情報から、自車Ciの走行レーンrが順次、決定される。
【0086】
他車情報依存補正手段42bは、自車情報に基づいて決定された走行レーンrに対して、他車Coの走行レーンr(自位置)が受信され、他車Coの走行レーンrについての自信度が高いことを条件として、他車Coの走行レーンrから自車Ciの走行レーンrを基準として自車Ciの走行レーンrを補正・決定する。
この他車情報依存補正手段42bへは、他車Coの走行レーンr、車間状態確認手段11から自車Ciと他車Coとの間における走行レーンrに関する関係情報が送られてくる。そして、この手段42bでは、他車Coの走行レーンrを基準として、自車Ciの走行レーンrを決定する。例えば、前方カメラ8aで得られた画像より、他車Coが自車Ciと同一の走行レーンrを走行していることが確認された状況で、他車Coが保有している走行レーンrの情報が、自車情報依存補正手段42aにより決定された走行レーンrに対して優先するものとされ、他車情報依存補正手段42bにより決定された走行レーンrが、現在の走行レーンrとして決定される。
【0087】
この例にあっても、自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部43において走行レーン決定が行われる毎に、その決定状況を判定し、決定状況が得点に加算・減算に相当する状況である場合には、表3に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。但し、この例では、総得点の上限値及び下限値が設定されており、例えば、撮像情報を利用して良好に走行レーンrを認識する認識状態が連続して、比較的長い時間継続しても、総得点が上限を超えないように総得点が調整されるように構成されている。
【0088】
この積算状況を、図9に基づいて説明する。
上図は、図3と同様に、車Cが右側から左側へ走行する状況を示したものであり、走行路Rが、路肩、白線等を良好に認識できていた走行路から、認識できなくなった状況を示しており、その後、再度、跨ぎ判定が可能となって、これを行い、その後、路肩は認識可能で白線を認識できていない状況で、さらに全く認識ができなくなり、白線のない走行路に至った状況を示している。
【0089】
総得点の変化は、最初、先ず、路肩、白線等が良好に認識されたことで、50点の総得点が確保されていた状況に対応している。その後、跨ぎ、白線、路肩を認識できなくなったことで、順次、減算が行われ、再跨ぎ判定が行われたことで、30点の加算が行われ、さらに減算が行われ、総得点は、図示する様なのこぎり歯状の変化となる。そして、白線のない走行路に至ることで、その進入時に30点が減算されることを示している。
【0090】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、この例の場合も、自信度は、走行状態にある車において、常時、決定された自信度が保持されることとなる。
【0091】
車間状態確認手段11は、カメラ8等から得られる撮像情報に基づいて、自車Ciと他車Coとの間における、走行レーンrの関係を確認する手段である。即ち、撮像情報に現れた他車Coと白線との関係から、相互の車Cが走行している走行レーンrの状態を確認する。例えば、図11、12に示される状況では、自車Ci及び他車Coは、同一の白線対Mp内に存在する撮像が得られるため、同一走行レーンrにいることが確認できる。一方、図8(b)に示す撮像が得られた場合、自車Ciに対して右側に位置する白線(破線)を越えて、他車Coが撮影されているため、他車Coが左側の走行レーンrにいることが確認できる。
よって、他車Coの自信度が、自車Ciの自信度より高い場合に、他車Coが認識している走行レーンrの情報と、この車間状態確認手段11により得られる情報を利用して、現在の自車Ciの走行レーンrを補正・決定できる。
【0092】
以上が、この実施形態における演算制御装置4の構成の説明であるが、以下、図10、図11、図12に基づいて、走行レーンrの補正・決定に関して説明する。
図11と図12とは、ともに他車Coが地物Mである白線Mp(具体的には破断線)の認識を行っている状況を示しているが、図11に示す例では、地物認識が良好に行われ、他車Coの走行レーンrが良好に決定された状況を示している。従って、他車Coの自信度は10とされている。
一方、図12に示す例では、地物認識が良好に行われなかったため、走行レーンrは誤って認識されており(左レーンと認識している)、自信度が低い状況を示している。従って、他車Coの自信度は4である。
【0093】
この状態から、自車Ciと他車Coとの間における車車間通信を利用しての自車Ciの走行レーンrの補正・決定処理が本願に係るシステムでは実行される。
図10は、この状態における自車Ciにおける処理フローを示したものである。
以下、このフローに従って、説明を進める。
処理の開始に伴って他車Co(前方車両)の情報を取得する(ステップ11)。このとき取得される情報には、他車Coの識別番号、車種、通信形態等が含まれる。他車Coの情報の取得ができず、他車Coの認識が行えない場合(ステップ12:no)は、情報取得を繰り返す。情報の取得ができ、通信を確立できた場合(ステップ12:yes)は、他車Coの自信度を取得する(ステップ13)。
そして、自信度比較部44で、他車Coと自車Ciとの自信度を比較する(ステップ14)。比較の結果、他車Coの自信度が自車Ciの自信度より高い場合(ステップ14:yes)は、他車Coの走行レーンrの情報に基づいて自車Ciの走行レーンrを補正する処理に移る。
【0094】
一方、比較の結果、他車Coの自信度が自車の自信度より低い場合(ステップ14:no)は、ステップ11に戻り、他車Coの自信度が自車Ciの自信度を上回るまで、ステップ11〜14の処理を繰り返すこととなる。この状況が、図12に示される状況であり、この図では、後続車である自車Ciの自位置が補正され、自信度8が変更されることはない。
【0095】
図11に示すように、自車Ciの自信度が他車Coの自信度より低い場合の処理は、以下の処理を順次おこなう。即ち、他車Co(前方車両)の走行レーンrの情報を取得する(ステップ15)。そして、車間状態確認手段11により、他車Coと自車Ciとの走行レーンrの関係を検出する(ステップ16)。図11に示す例では、他車Coと自車Ciとは同一の走行レーンrを走行していることが撮像情報から確認される。引き続いて、このようにして得られる他車Coの走行レーンrから自車Ciの走行レーンrを求め、他車情報依存補正手段42bが、得られた走行レーンCiを現在の走行レーンrとして自車Ciの走行レーンrを補正する(ステップ17)。この補正が良好に完了した場合は、走行レーンrの補正処理を完了し(ステップ18:yes)、何らかの理由で完了できなかった場合は、ステップ15に戻って処理を実行する。完了した場合、自車Coの自位置認識の自信度は、他車の自信度に置換する。
この状況が図11に示した状況であり、自車Coの自信度が3から10に変更されている。
【0096】
3 第三実施の形態
この実施の形態は、認識対象となる自位置が走行路自体である例である。
この実施形態のシステム形態を図13に示した。
本システムから得られる自位置に関する情報である認識走行路に関する情報は、ナビゲーション装置本体2あるいは走行制御装置3に送られて、的確なナビゲーション、走行制御に使用される。
【0097】
この例にあっても、自位置認識システム1は、システム本体となる演算制御装置4と、この演算制御装置4に接続された附属機器とを備えて構成される。
【0098】
演算制御装置4には、先の例と同様に、自律航法センサ5、GPS受信機6、前方カメラ8a及び後方カメラ8bが接続されており、それぞれの機器からの検出情報が入力される。車車間通信モジュール9が接続されていることも先の例と同様である。
【0099】
第一の実施形態では、自車と他車との車間距離を検出するための車間距離検出モジュール10が設けられていたが、本例にあっては、この装置10に加えて、第二の実施形態と同様に、制御演算装置4内に、前方カメラ8a等の撮像装置からの情報である撮像情報から、画像認識により自車Ciと他車Coとの位置関係である車間状態を確認する車間状態確認手段11が備えられている。
【0100】
演算制御装置4には、記憶手段としてのデータベースDBが備えられており、このデータベースDBには、地図データベースDBmと自信度演算データベースDBcが備えられている。
地図データベースDBmは、図3に示すように階層化された構成を採用されており、道路ネットワークレイヤL1、道路形状レイヤL2、地物レイヤL3が格納されている。
【0101】
この地図データベースDBmを使用することで、上記の自律航法センサ5からの走行軌跡あるいはGPS情報から求まる現在の位置(緯度・経度)に基づいて、現在の自車Ciの走行路Rに沿った位置を地図上でマッチングすることができる。
さらに、この地図データベースDBmには、走行路自体の識別情報(例えば走行路名)が格納されており、第一の実施の形態で説明したように、走行路R上での、その走行路に沿った自位置が決定できた段階で、現在走行中と認識している走行路R(この走行路が、本願にいう認識走行路である)を認識できるようにされている。この走行路R自体の認識に関しては、第五自位置認識手段41eにおいて説明する。
【0102】
自信度演算データベースDBcは、先の例と同様に、得点データベースDBc1及び自信度換算データベースDBc2を備えて構成されている。
得点データベースDBc1は、以下の表4に示すように、自位置の認識のタイミングで、加算又は減算される得点(表4左欄に示す)と、その得点の事例要因(表4右欄に示す)の関係を纏めたデータベースである。得点の加算及び減算は、左欄に示されるプラスマイナスに依存することとなる。但し、この例では、自位置は走行路自体であるため、事例に対応する総得点の加算・減算に関して、実質上、自車が走行していると認識している走行路に変更の可能性がない状態(例えば、分岐・合流等に到達していない)では、加算・減算は行わない。即ち、現実の走行路変更を行ったと認識した場合、あるいは、分岐を通過する等、走行路に変更の可能性があった場合に、単一回の加算・減算を行う。
【0103】
【表4】
【0104】
表4に示す事例要因に関して例示的に説明しておくと、「一本道にマッチングしており、近くに並走路がない」場合に、得点が50点加算されることを示している。これは、マッチングが確実に行われているため、正確に自車が走行している走行路自体が認識できる状況にあるためである。
一方、「並走路がある道を走行」している場合は、並走路に離間状態で、得点が加算されることを示している。並走路が近くにあるほうが、加算点は低くなり、事実上、並走路が20m以内にある場合は、加算される得点はなくなる。
さらに、「上下道のような直近に並走路がある」場合は、10点減点されることを示している。また「分岐直後」には、得点が10点減算される。
その他、それぞれに状況に応じて、得点の加算及び減算を行うように得点が決定されているのは、先の例と同様である。
【0105】
自信度換算データベースDBc2の構造は先に示した表2と同様であり、その使用形態も同様である。
【0106】
以上が、この例において、演算制御装置4に接続されている機器およびその機能の説明であるが、以下に演算制御装置4内の構成に関して説明する。
図13からも判明するように、この装置4内にも、自位置認識部41、自位置決定部42、自信度決定部43及び自信度比較部44が設けられている。
【0107】
自位置認識部41は、演算制御装置4に送られてくる情報から自位置(走行路自体である認識走行路)の認識をも実行する機能部位であり、自位置決定部42は、これまで認識されていた自位置を補正して、現在の自位置として最も確からしさの高い走行路をも決定する機能部位である。
一方、自信度決定部43は、上記のようにして決定される認識走行路に関する自信度をも演算する機能部であり、自信度比較部44は、車車間通信モジュール10を介して送られてくる、他車Coの自信度と現在の自車Ciの自信度とを比較し、その比較結果に基づいて、自位置決定部43において、他車情報依存の補正を行うか否かの判定情報をも得る機能部である。
【0108】
この例にあっては、自位置認識部41には、先に説明した、第一自位置認識手段41a、第二自位置認識手段41b及び第三自位置認識手段41cの3種の認識手段が備えられているほか、第五自位置認識手段41eが備えられている。
第一、第二、第三自位置認識手段41a,41b,41cの機能は、走行路Rにおける走行方向に沿った自位置を認識する上で、先の第一実施の形態の場合と同様であり、説明を省略する。
【0109】
第五自位置認識手段41eは、現在、走行している走行路Rを認識する機能部である。この手段41eにおいては、自位置決定部42において、走行路Rに沿った自位置が逐次決定されているため、その決定において自車が走行していると認識している走行路自体を認識走行路とする。この走行路の認識で使用する識別情報は、例えば、先に説明した各走行路単位でデータベースに登録されている走行路名である。
【0110】
この例にあっても、自位置決定部42には、自車情報依存の自位置補正を行う自車情報依存補正手段42aと、他車情報にも基づいた自位置補正を行う他車情報依存補正手段42bが設けられている。走行路Rに沿った自位置に決定は、第一の実施の形態と同様に行われるため、以下の説明では、走行路の決定に関してのみ説明する。
【0111】
自車情報依存補正手段42bは、過去に決定された認識走行路Rに対して、新たな認識走行路Rが自位置認識部で認識された場合は、新たな認識走行路Rに現在の認識走行路を補正する。この例では、自位置認識部41に備えられる第五自位置認識手段41eによる認識結果が、認識走行路Rの補正・決定に、実質上、そのまま使用される。
このようにすることで、常時、逐次的に、自車側で得られる情報から、自車の認識走行路が順次、決定される。
【0112】
他車情報依存補正手段42bは、自車情報に基づいて決定された走行路Rに対して、他車Coの認識走行路(自位置)が受信され、他車Coの認識走行路についての自信度が高いことを条件として、他車Coの認識走行路から自車の走行路を補正・決定する。
この他車情報依存補正手段42bへは、図13に示すように、他車Coの認識走行路の情報と、車間状態確認手段11から自車Ciと他車Coとが実際に走行している走行路間に関する関係情報が送られてくる。そして、この手段42bでは、他車Coの認識走行路を基準として、自車Ciの認識走行路を決定する。例えば、前方カメラ8で得られた撮像画像より、他車Coが自車Ciと同一の走行路Rを走行していることが確認された状況で、他車Coが保有している認識走行路の情報が、自車情報依存補正手段42aにより決定された認識走行路に対して優先するものとされ、他車情報依存補正手段42bにより決定された走行路が、現在の認識走行路として決定される。
【0113】
この例にあっても、自信度決定部43には、得点積算手段43aと自信度演算手段43bが備えられている。
得点積算手段43aは、自位置決定部42において認識走行路の補正・決定が行われ、自車が分岐に到達する毎に、その時点の状況を判定し、状況が得点に加算・減算に相当する状況である場合には、表4に示した得点表に従って、得点の加算・減算を実行し、これを総得点として積算する。この例の場合も、総得点には、その上限値と下限値とを設けている。
【0114】
この積算状況を、図14に基づいて説明する。
この図は、走行路R1,R2が合流する状態であることを示しており、図上、下側に位置する第一走行路R1は、一本道から合流点RMに到達している。上側に位置する第二走行路R2は、左上方向から第一走行路R1との合流点RMまで、順次、分岐を繰り返している。これら分岐路を上から順に、RD1,RD2、RD3と図示している。
さらに、分岐路RD1,RD2、RD3間及び、分岐路RD3と合流点RMより下手側の第一走行路R1の距離は、20m以内としている。
【0115】
この場合における総得点の変化を、図上の対応部位に示した。
第一走行路R1に関しては、一本道であることから、この走行路R1を走行している車の総得点は50点とされる。一方、第二走行路R2に関しては、左上側において一本道であったため総得点が50点であったのが、分岐RDの繰り返しに伴って、20点まで自信度が低下して、合流点RMに到達する結果となっている。
【0116】
自信度演算手段43bは、得点積算手段43aにより積算される総得点に基づいて表2に示す自信度換算テーブルから自信度を演算する。
従って、この例の場合も、自信度は、走行状態にある車において、常時、決定された自信度が保持されることとなる。
【0117】
車間状態確認手段11は、カメラ8等から得られる撮像情報に基づいて、画像認識により自車Ciと他車Coとの間における例えば、実際に走行している走行路Rの関係を確認する。例えば、撮像情報に現れた他車Coと路肩或いは白線との関係から、相互の車Ci、Coが走行している走行路Rの状態を確認することができる。先に示した図5、図6に示される状況では、自車Ci及び他車Coは、同一の白線対内に存在する撮像が得られるため、同一走行路にいることが確認できる。
よって、他車Coの自信度が、自車Ciの自信度より高い場合に、他車Coが認識している走行路の情報と、この車間状態確認手段11により得られる情報を利用して現在の自車の走行路を補正・決定できる。
【0118】
この例の場合、第二の実施形態における走行レーンに関する情報が、認識走行路に関する情報となり、第二の実施形態と同様なシーケンスを経ることで、自車Ciと他車Coとの自信度の比較を行い、認識走行路の補正・決定において、他車Coの認識走行路を使用するか、自車Ciの認識走行路を使用するかの判断を行い、他車Coの自信度が高い場合に、他車Coの認識走行路に基づいて自車Ciの認識走行路を補正・決定することができる。
【0119】
この状態を示したのが、図14、図15であり、合流点RMの走行下手側において、先行車Cfと後行車Cbとの間で、認識走行路の補正・決定を行う状況を示している。
この状況では、後行車Cbが第二走行路R2から第一走行路R1に合流した状態で、後行車Cbの自信度が分岐の存在で低下する(図15の上側箱内参照)。
後続車Cbとしては、実線で合流点RM下手側に、破線で分岐路RD3上に図示するように、第一走行路R1に進入したのか、第三分岐路RD3に進入したのかが、確定できない状況である。
この状況においても、先行車Cfと後行車Cbとの間で自信度の比較を実行し、先行車Cfの自信度が高い場合は、同一の走行路R1を走行していることが確認できたことを条件として、後行車Cbの認識走行路を先行車Cbの認識走行路として精度の高いものとできる。
【0120】
一方、図14に破線で示すように、後行車Cbが、分岐路RD3に進入している状況では、車間状態確認手段11が、先行車Cfが斜め前の並走路である第一走行路R1を走行していることを確認することで、後行車Cbが分岐後に並行路RD3を走行している状況を確認できる。
〔別実施の形態〕
(1) 上記の実施の形態では、走行路に沿った自位置の認識を実行する自位置認識手段として、3種の手段41a、41b、43cの全てを有する構成に関して説明したが、何れか一種以上を有する構成であってもよい。自位置認識手段を単一しか有しない場合は、自車情報依存補正手段は、備える必要がない。但し、本願の趣旨から、他車情報依存補正手段は必然的に備えられることとなる。
(2) 自信度の演算に関しては、表1、3、4に示すような事象要因に伴って、得点を積算して、総得点から、自信度を演算するものとしたが、このような手法を採ることなく、例えば自位置を決定する方式に基づいて、自信度を演算・決定するものとしてもよく、任意の手法で自信度を得ることができる。
(3) 上記の実施の形態では、走行路に沿った方向での自位置の認識・決定の後、その場所での地図情報を利用した走行レーンの認識・決定、或いは、認識走行路の認識・決定を行うものとしたが、走行レーンの履歴、認識走行路の履歴等を利用して、走行レーンのみを単独で、あるいは、認識走行路を単独で認識・決定するものとしてもよい。
(4) 上記の実施の形態にあっては、車車間通信は、車車間で直接行われる例を示したが、通信は最終的に、送信車両から受信車両へ行われればよく、例えば、通信センター等を介する間接的な形態で行われてもよい。
【産業上の利用可能性】
【0121】
他車の有する自位置に関する情報に基づいて、自位置を認識するシステムにおいて、位置精度が高く、認識される自位置の確からしさを高く維持できる自位置認識システムを得ることができた。
【図面の簡単な説明】
【0122】
【図1】第一の実施形態に係る自位置認識システムの構成を示す図
【図2】地図データベースの構造を示す図
【図3】第一の実施形態における総得点の変化を示す説明図
【図4】第一の実施形態に係る自位置認識システムの処理フローを示す図
【図5】第一の実施形態で、他車の自位置を補正に使用する場合の説明図
【図6】第一の実施形態で、補正を行わない場合の説明図
【図7】第二の実施形態に係る自位置認識システムの構成を示す図
【図8】走行レーン認識の説明図
【図9】第二の実施形態における総得点の変化を示す説明図
【図10】第二の実施形態に係る自位置認識システムの処理フローを示す図
【図11】第二の実施形態で、他車の自位置を補正に使用する場合の説明図
【図12】第二の実施形態で、補正を行わない場合の説明図
【図13】第三の実施形態に係る自位置認識システムの構成を示す図
【図14】第三の実施形態における総得点の変化を示す説明図
【図15】第三の実施形態に係る後続車の自位置を補正に使用する場合の説明図
【符号の説明】
【0123】
1 自位置認識システム
4 演算制御装置
5 自律航法センサ
6 GPS受信機
8 カメラ(撮像手段)
9 車車間通信モジュール(車車間通信手段)
10 車間距離検出モジュール(位置関係検出手段)
11 車間状態確認手段(位置関係検出手段)
41 自位置認識部
42 自位置決定部
43 自信度決定部
44 自信度比較部(自信度比較手段)
Ci 自車
Co 他車
DB データベース
DBm 地図データベース
DBc 自信度演算データベース
【特許請求の範囲】
【請求項1】
各車両に、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段とを備え、
車両間で情報通信を行う車車間通信手段を備える自位置認識システムであって、
各車両に、前記自位置の確からしさの指標である自信度を演算する自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成されるとともに、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識システム。
【請求項2】
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係である請求項1記載の自位置認識システム。
【請求項3】
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正する請求項2記載の自位置認識システム。
【請求項4】
前記自位置認識手段は、走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項1〜3の何れか一項記載の自位置認識システム。
【請求項5】
前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係である請求項1記載の自位置認識システム。
【請求項6】
前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正する請求項5記載の自位置認識システム。
【請求項7】
前記自位置認識手段は、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項5又6項記載の自位置認識システム。
【請求項8】
各車両で、自位置の認識を行う自位置認識工程と、前記自位置認識工程で認識される自位置を補正する自位置補正工程とを実行し、
車両間で情報通信を行う自位置認識方法であって、
各車両で、前記自位置の確からしさの指標である自信度を演算する自信度演算工程を実行し、
送信車両から受信車両に送信車両の自位置及び自信度を送信し、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出工程を実行し、
前記送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較工程を実行し、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記自位置補正工程において、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識方法。
【請求項9】
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係である請求項8記載の自位置認識方法。
【請求項10】
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正する請求項9記載の自位置認識方法。
【請求項11】
前記自位置認識工程は、走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項8〜10の何れか一項記載の自位置認識方法。
【請求項12】
前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係である請求項8記載の自位置認識方法。
【請求項13】
前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正する請求項12記載の自位置認識方法。
【請求項14】
前記自位置認識手段は、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項12又13項記載の自位置認識方法。
【請求項15】
自位置の認識を行う自位置認識手段、前記自位置認識手段により認識される自位置を補正する補正手段、及び車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、受信車両に、自車の自位置及び自信度を送信可能に構成されている自位置認識用送信システム。
【請求項16】
自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段及び、車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から送られてくる送信車両の自位置及び自信度を受信可能に構成されるとともに、自車に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、自車が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、自車の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識用受信システム。
【請求項1】
各車両に、自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段とを備え、
車両間で情報通信を行う車車間通信手段を備える自位置認識システムであって、
各車両に、前記自位置の確からしさの指標である自信度を演算する自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から受信車両に、送信車両の自位置及び自信度を送信可能に構成されるとともに、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識システム。
【請求項2】
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係である請求項1記載の自位置認識システム。
【請求項3】
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正する請求項2記載の自位置認識システム。
【請求項4】
前記自位置認識手段は、走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項1〜3の何れか一項記載の自位置認識システム。
【請求項5】
前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係である請求項1記載の自位置認識システム。
【請求項6】
前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正する請求項5記載の自位置認識システム。
【請求項7】
前記自位置認識手段は、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項5又6項記載の自位置認識システム。
【請求項8】
各車両で、自位置の認識を行う自位置認識工程と、前記自位置認識工程で認識される自位置を補正する自位置補正工程とを実行し、
車両間で情報通信を行う自位置認識方法であって、
各車両で、前記自位置の確からしさの指標である自信度を演算する自信度演算工程を実行し、
送信車両から受信車両に送信車両の自位置及び自信度を送信し、前記受信車両に対する送信車両の相対位置関係を検出する位置関係検出工程を実行し、
前記送られてくる送信車両の自信度と、受信車両が認識している自信度とを比較する自信度比較工程を実行し、
前記送信車両の自信度が、受信車両の自信度より高い場合に、前記自位置補正工程において、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識方法。
【請求項9】
前記自位置が走行方向に沿った走行路上の位置であるとともに、前記自信度が前記走行路上の位置に関する確からしさの指標であり、前記相対位置関係が、車両間における前記走行路に沿った位置関係である請求項8記載の自位置認識方法。
【請求項10】
前記送信車両が走行方向前側を走行している前方車両で、前記受信車両が前記送信車両より後側を走行している後方車両であり、前記前方車両が認識している前方車両の自位置と、前記前方車両と後方車両との前記走行方向に沿った車間距離に基づいて、自位置を補正する請求項9記載の自位置認識方法。
【請求項11】
前記自位置認識工程は、走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項8〜10の何れか一項記載の自位置認識方法。
【請求項12】
前記自位置が走行路単位で認識され、前記自信度が自車が走行していると認識している認識走行路の確からしさを示す指標であり、前記相対位置関係が、車両間における各車両が走行している走行路間の関係である請求項8記載の自位置認識方法。
【請求項13】
前記送信車両が自車の周囲を走行している周囲車両で、前記受信車両が自車であり、前記周囲車両が認識している認識走行路と、前記自車が走行している走行路と前記周囲車両が走行している走行路との関係に基づいて、自位置を補正する請求項12記載の自位置認識方法。
【請求項14】
前記自位置認識手段は、前記走行路に沿って認識可能な地物の位置情報、GPS情報あるいは、自律航法センサから検出される検出情報のいずれか一種以上から、自位置の認識が可能に構成される請求項12又13項記載の自位置認識方法。
【請求項15】
自位置の認識を行う自位置認識手段、前記自位置認識手段により認識される自位置を補正する補正手段、及び車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、受信車両に、自車の自位置及び自信度を送信可能に構成されている自位置認識用送信システム。
【請求項16】
自位置の認識を行う自位置認識手段と、前記自位置認識手段により認識される自位置を補正する補正手段及び、車両間で情報通信を行う車車間通信手段を備え、
前記自位置の確からしさの指標である自信度を求める自信度演算手段を備え、
前記車車間通信手段を介して、送信車両から送られてくる送信車両の自位置及び自信度を受信可能に構成されるとともに、自車に対する送信車両の相対位置関係を検出する位置関係検出手段を備え、
前記車車間通信手段を介して送られてくる送信車両の自信度と、自車が認識している自信度とを比較する自信度比較手段を備え、
前記送信車両の自信度が、自車の自信度より高い場合に、前記補正手段が、送信車両の自位置及び前記相対位置関係に基づいて自位置の補正を行う自位置認識用受信システム。
【図1】

【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図9】

【図10】
【図11】

【図12】

【図13】

【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2007−178270(P2007−178270A)
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願番号】特願2005−377455(P2005−377455)
【出願日】平成17年12月28日(2005.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
【公開日】平成19年7月12日(2007.7.12)
【国際特許分類】
【出願日】平成17年12月28日(2005.12.28)
【出願人】(000100768)アイシン・エィ・ダブリュ株式会社 (3,717)
【Fターム(参考)】
[ Back to top ]