
Fターム[2F129BB56]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 傾斜補正 (191) | 地図データ利用 (75)
Fターム[2F129BB56]に分類される特許
1 - 20 / 75
慣性航法システムのための誤差修正を備えた方法、装置、およびシステム
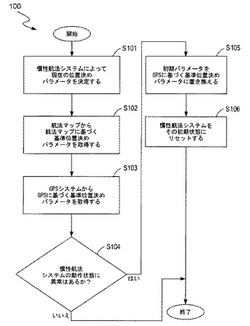
【課題】慣性航法システムのための誤差修正方法を提供する。
【解決手段】この方法は、移動対象の現在の位置決めパラメータ、航法マップに基づく基準位置決めパラメータ、およびGPSに基づく基準位置決めパラメータに基づいて慣性航法システムの動作状態を決定するステップと、慣性航法システムの初期パラメータをGPSに基づく基準位置決めパラメータに置き換えるステップと、慣性航法システムが異常動作状態にあると決定された場合、慣性航法システムを初期状態にリセットするステップとを有する。
(もっと読む)
測位場所識別装置、測位場所識別方法、プログラム及び測位場所識別システム

【課題】取得した軌跡から軌跡が位置する場所の状態を識別することができること。
【解決手段】測位場所識別システムは、ネットワークを介して相互に接続される端末11及びサーバ12を備える。端末11又はサーバ12は、時間方向に離間して、端末11の現在位置としてそれぞれ測位された複数のGPS測位データを取得する。端末又はサーバは、端末11により取得された複数のGPS測位データに基づいて、端末11の現在位置の測位が不能になる前の第1の測位位置と、端末の現在位置の測位が再度可能になった後の第2の測位位置との間の距離を求め、当該距離に基づいて、第1の測位位置と第2の測位位置との間の場所の状態を判別する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両の走行距離を検出する為の車速センサ22の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定する(S41〜S43)とともに、車両の方位変化を検出する為のジャイロセンサ24の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定し(S44〜S46)、特定された方向に基づいて車両の検出位置の誤差範囲を推定する(S47)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が走行する道路の車線数から車両が走行中の道路で行うことができる最大の車線変更回数を特定し(S52)、特定された最大の車線変更回数に基づいて車両の検出位置の誤差範囲を推定する(S53)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の位置を正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点を直進して通過する場合に、バックカメラ19で撮像した画像に基づいて車両が走行する道路上に存在する地物を検出し(S13)、検出された地物の配置パターンである検出配置パターンが、分岐点へ進入する進入道路上に設けられた地物の配置パターンである進入側配置パターンと一致する場合に、分岐点の周辺に設けられた地物又は分岐点のノードとの相対位置によって移動体の位置を特定する(S18、S19)ように構成する。
(もっと読む)
近似標高値特定装置及びその方法、並びに近似標高値を特定するためのコンピュータプログラム及びコンピュータプログラムを記録した記録媒体
【課題】 本発明は、標高データの近似標高値特定装置及びその方法に関する。
【解決手段】 地図データ保存部から、近似標高値の特定対象となる道路リンクを選択し、メッシュ標高データに基づいて当該対象リンクの3Dリンクを形成し、該3Dリンクの始点及び終点に基づいて基準線を形成し、該基準線と3Dリンク上各点との関係が第1の条件を満たすように該3Dリンク上の折れ点予定座標を決定し、該折れ点予定座標の標高値において誤差幅を考慮した、該3Dリンクに近似する近似折れ線を形成し、形成された近似折れ線における折れ点の標高値を近似標高値と特定する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】右左折後の移動体の位置を迅速且つ正確に検出及び修正することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点で右左折したことを検出した場合に、車両の分岐点での走行態様(右折したか左折したか)と進入道路の対向車線の有無や車線数に基づいて、車両が分岐点で右左折した際に、実際の車両の位置に対して車両の進行方向に生じ得る最大の検出誤差である前ズレ量Mと、実際の車両の位置に対して車両の進行方向と逆方向に生じ得る最大の検出誤差である後ズレ量Nとをそれぞれ算出し(S17、S18)、算出された前ズレ量Mから後ズレ量Nの間のいずれかの地点に車両が位置するとして、検出された車両の現在位置を修正する(S19)ように構成する。
(もっと読む)
参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラム
【課題】参照データの取得に要する通信コストの増大を抑制しつつ、撮影画像に影響を与える周辺環境に対応する適切な参照データを取得することができる、参照データ取得装置、参照データ取得システム、参照データ取得方法、及び参照データ取得プログラムを提供すること。
【解決手段】参照データ取得装置60は、車両2の周辺を撮影した撮影画像のマッチングに用いる参照データを取得するための参照データ取得装置60であって、車両2の走行予定経路を特定し、当該特定した走行予定経路において撮影画像と参照データとのマッチングを行う可能性のあるマッチング地点を特定するマッチング地点特定部61aと、撮影画像に影響を与える周辺環境をマッチング地点毎に特定し、当該特定した周辺環境に対応する参照データを当該マッチング地点毎に取得する参照データ取得部61bとを備える。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
物体の位置を特定する電子システム
【課題】物体の位置を特定する電子システムを提供すること。
【解決手段】物体の計算方位およびデータベースに格納された道路区間の方位に従って、方位一致道路(OMR)区間のセットを求めてデータベースを探索する。物体の計算位置およびOMR区間の位置に従って、位置一致道路(PMR)セットを求めてOMR区間を探索する。PMRセットは1つまたは複数のPMR区間を含む。PMRセットを使用して物体の位置を特定する。
(もっと読む)
ナビゲーション装置、車載センサの精度推定方法、および、プログラム
【課題】車載センサの信頼度を簡易な方法で推定する技術を提供する技術を提供する。
【解決手段】ナビゲーション装置100は、車載センサの精度を推定するナビゲーション装置であって、特定の区間の距離が記録されている地図データを記憶している記憶手段と、車載センサを用いて、当該区間の距離を計測する計測手段と、地図データに記録されている距離と、計測手段で計測された距離と、のずれ量に基づいて、車載センサの精度を推定するセンサ精度推定手段と、を備える。
(もっと読む)
ナビゲーション装置
【課題】歩行者と自動車との接触事故を未然に防ぐための注意を喚起するナビゲーション装置を提供する。
【解決手段】交差地点特定部は、車両用ネットワークを構成する道路リンクおよび道路ノードと、歩道に対応する歩行者用ネットワークを構成する歩道リンクおよび歩道ノードとを重畳させる(ステップS41)。次に、歩道リンクと、道路リンクとが交差すると思われる候補地点において、両リンクの高さが一致する場合には、交差地点特定部は、歩道ネットワークと道路ネットワークとが交差していると判定して、その候補地点を交差地点として確定させる(ステップS45)。交差地点では、携帯端末の注意喚起部が、車両との接触事故を回避するための注意喚起のメッセージを報知する。
(もっと読む)
タイヤ空気圧測定装置、方法およびプログラム
【課題】正確にタイヤの空気圧を測定する技術の提供。
【解決手段】車両が備える車輪の回転数を示す情報の測定に誤差を生じさせる誤差要因を特定し、前記誤差要因に応じて前記車輪の回転数を示す情報の測定を行う測定区間を特定し、前記測定区間において前記車輪の回転数を示す情報を測定し、前記回転数を示す情報と前記車輪のタイヤの空気圧が基準気圧である状態で前記車両が前記測定区間を走行した場合の前記車輪の基準回転数を示す情報とを比較して前記タイヤの空気圧を測定する。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、ナビゲーション方法
【課題】端末側の記憶領域が少ない場合やサーバとの通信状態が一時的に悪い場合においても端末側で十分な経路案内を行うことができる、ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、利用者の現在位置の周辺の主要道路に接続された道路のネットワークデータである現在位置付近詳細ネットワークデータの取得要求をナビゲーションサーバに送信して当該データを受信し、通信状態が正常と判定した場合に、経路探索条件を送信してサーバから詳細ネットワークデータに基づく経路探索結果を受信し、一方、通信状態が正常ではないと判定した場合に、端末側の記憶部に記憶された高階層ネットワークデータおよび現在位置付近詳細ネットワークデータに基づいて経路探索結果を算出し、受信した経路探索結果または算出した経路探索結果を出力部に出力させる。
(もっと読む)
経路探索システム、経路探索サーバ、および、経路探索方法
【課題】サーバ側で経路を閲覧可能にするか、または、保存するかを、端末装置から送信された端末装置の現在位置情報に基づく経路探索結果、または、外部システムから送信された端末装置の現在位置情報に基づく経路探索結果で振り分けることができる経路探索システム、端末装置、経路探索サーバ、および、経路探索方法を提供することを課題とする。
【解決手段】本発明は、経路探索サーバにて、端末装置から送信される経路探索条件を受信し、端末装置の現在位置を示す現在位置情報を受信し、経路探索条件と現在位置情報とに基づき案内経路を探索し、案内経路データを生成し、現在位置情報が端末装置から受信されたか否かを判定し、端末装置の経路探索の履歴情報として判定結果と案内経路データとを対応付けて格納し、履歴情報に含まれる判定結果に基づいて、案内経路データを端末装置に対して閲覧可能とする。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】複数の測位手段のうち最適な測位手段の選択を容易にし、測位情報を迅速に反映させることを可能にする、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにおいて、地図データ中の測位範囲情報で示す範囲において端末装置が適切な測位手段を選択制御するための測位制御パラメータを生成し、地図データ、測位制御パラメータ、および、測位範囲情報を端末装置に送信し、端末装置において、受信した地図データを出力し、受信した測位制御パラメータに対応する測位範囲情報で示す範囲内において、測位制御パラメータに基づいて測位手段を切り替える。
(もっと読む)
測位装置、位置データの記録方法およびプログラム
【課題】現在位置を測定して位置データを記録していく測位装置において、一連の位置データにより詳細な移動軌跡を表すことができ、且つ、位置データの全体の記録量がさほど大きくならないようにする。
【解決手段】現在位置の測定を行う測位手段と、この測位手段の測定によって順次取得される一連の位置データの記録制御を行う記録制御手段とを備えた測位装置、並びに、その位置データの記録方法およびプログラムにおいて、一連の位置データにより示される移動軌跡の曲り箇所(D2,D3,D4,D5)の判別を行って、曲り箇所と判別されない部分の位置データを省いて、曲り箇所と判別された部分の位置データのみを記録させる。
(もっと読む)
ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法
【課題】複数の測位手段がある場所において、所望の測位手段をユーザーの望むタイミングで選択可能に表示することで、測位手段を迅速かつ適切に切り替えることを可能にするナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション装置、および、ナビゲーション方法を提供することを課題とする。
【解決手段】本発明は、ナビゲーションサーバにおいて、地図データ中の測位範囲情報で示す範囲において測位手段が選択可能であることを示す切替可能測位手段情報を生成し、地図データおよび切替可能測位手段情報を端末装置に送信し、端末装置において、受信した地図データおよび切替可能測位手段情報を出力し、出力された切替可能測位手段情報を端末装置の利用者が選択した場合に、当該選択された切替可能測位手段情報に対応する測位範囲情報で示す範囲内において、対応する測位手段に切り替える。
(もっと読む)
ナビゲーション装置
【課題】車両が走行している車線をより確実に推定することができるナビゲーション装置を提供する。
【解決手段】車両の現在地を検出する現在地検出装置14と、道路画像を記憶するデータ記憶装置110と、車両が走行している車線を撮像する撮像カメラ19と、データ記憶装置110によって記憶された分岐点ガイド画像の中から現在地検出装置14によって検出された現在地に対応する分岐点ガイド画像を読み出し、読み出された分岐点ガイド画像から道路標示を抽出し、撮像カメラ19によって撮像された車両前方道路実画像から道路標示を抽出し、抽出された道路標示を比較することにより、車両の自車位置を推定する制御回路11とを備える。
(もっと読む)
1 - 20 / 75
[ Back to top ]