
Fターム[2F129BB56]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 傾斜補正 (191) | 地図データ利用 (75)
Fターム[2F129BB56]に分類される特許
61 - 75 / 75
車載ナビゲーション装置及びマップマッチング方法
【課題】高いマッチング精度でマップマッチングを行うことができるようにする。
【解決手段】自車が過去に通過した道路の情報を道路通過履歴として道路通過履歴記憶装置7に記憶させておき、ナビゲーションコントローラ1がマップマッチング処理を行って自車位置マークの表示位置を地図の道路位置上に修正する際に、道路通過履歴記憶装置7に記憶された道路通過履歴を考慮して、自車位置マークの表示位置を決定する。
(もっと読む)
現在位置算出装置

【課題】電波航法による計測を行えない期間の経過後に、より適正に現在位置を算出することのできる「現在位置算出装置」を提供する。
【解決手段】前回以前に最後にGPS受信機4から測位データを取得した回nに出力した現在位置Fnから、回nにGPS受信機4で求めた移動方向θ1と、今回n+mにGPS受信機4で求めた移動方向θ2の平均として求まる方向に、回nにGPS受信機4で求めた移動速度Vnと今回n+m、GPS受信機4で求めた移動速度Vn+mの平均として求まる速度で、回nから今回n+mまでの経過時間分移動した位置を今回の予測位置Cn+mとして算出し、その周囲に予測範囲Bn+mを設定する。そして、今回GPS受信機4で求めた測位位置が、予測範囲内に含まれる場合には、当該測位位置を現在位置として出力し、そうでない場合には、予測位置を現在位置として出力する。
(もっと読む)
自車位置検出装置、ナビゲーション装置、減速制御装置及び自車位置検出方法
【課題】 分岐地点で自車両が分岐路に進んだかどうかの判断を的確に行い、ナビゲーション装置で認識している自車両の現在位置を的確に補正する。
【解決手段】 単眼カメラ4の撮像情報に基づいて左右の道路白線の線種を判断し、ナビゲーション装置2からの自車両前方の道路地図情報に基づいて自車両前方にインターチェンジ出口への分岐地点を検出したとき、左右の道路白線の何れか一方が分岐地点の境界線の特徴である太破線であることが検出され(ステップS21、S25)、その後、他方の道路白線が太破線であることが検出されたとき(ステップS22、S26)、自車両は境界線を跨いで走行し、すなわち、本線から分岐路に進んだと判断する(ステップS23、S27)。この境界線を跨いだことを検出したとき、ナビゲーション装置2に対して位置補正要求を行い、ナビゲーション装置2では自車両の現在位置を、分岐地点の境界線近傍の位置に補正する。
(もっと読む)
ナビゲーションシステム、マッチング方法、経路探索サーバおよびナビゲーション端末装置
【課題】 ナビゲーション端末装置の現在位置を道路上に補正するためのマッチング処理を正確に行う。
【解決手段】 ナビゲーションシステム10は、衛星航法手段212、自律航法手段213、マッチング処理手段215、地点記憶手段219、測位手段選択部214を備えている。分岐ノードを通過した後の走行距離を自律航法手段213から取得し、分岐ノードから分岐する各リンク毎に当該リンク上の前記走行距離に基づく移動体の推定位置を示す地点情報を地点記憶手段219に記憶し、測位手段選択部214は、所定の選択条件に従って衛星航法手段212または自律航法手段213の測位出力の何れかを選択し、マッチング処理手段215は、自律航法手段213が選択された場合は自律航法手段測位結果から移動体の進行方向を判別し、地点記憶手段219を参照し、進行方向に合致するリンク上の推定位置の地点をマッチング位置として選択する。
(もっと読む)
ナビゲーション装置
【課題】より精度よく現在位置を求める技術を提供する。
【解決手段】ナビゲーション装置は、信号機のある交差点における車両の動作を利用して現在位置を求める。具体的には、ナビゲーション装置は、車両の信号待ち(信号機のある交差点付近での車両の停車)を検出した後、車両の旋回を検出した場合、その交差点において交差する道路であって旋回終了時の車両方位に一致する道路上に現在位置を求め直す。
(もっと読む)
ナビゲーション装置およびナビゲーション方法
【課題】マップマッチング機能を備えたナビゲーション装置において、地図データが更新されていないエリアを車両が走行している時に、車両の位置を正確に表示する。
【解決手段】最新の地図データに更新されているエリアを走行している時には、通常のマップマッチング処理を行い、最新の地図データに更新されていないエリアを車両が走行している場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、車両の位置を正確に表示することができる。
(もっと読む)
傾斜角算出装置及びナビゲーション装置
【課題】 車両自体の傾斜角を求めて、道路のみの傾斜角を正確に算出可能とする。
【解決手段】 ナビゲーション装置1は、車両の前後に取り付けるステレオカメラ10、11を具備し、水平的な姿勢における各ステレオカメラ10、11による算出距離に対応した基準距離D1、D2及び各ステレオカメラ10、11のレンズ中心間の水平距離を記憶部9に予め記憶している。各ステレオカメラ10、11が撮像した画像情報に基づき画像演算処理部8は地面までの距離を求め、求めた距離と基準距離との差及びレンズ中心間の水平距離等より三角関数を用いて車両自体の傾斜角(車両傾斜角)を算出する。算出した車両傾斜角で3Dジャイロセンサー5の検出結果より求めた傾斜角を補正して道路のみの傾斜角を得る。
(もっと読む)
走行支援装置
【課題】 車両位置の測位精度を向上させることができる走行支援技術を提供する。
【解決手段】 走行支援装置10は、車両800の進行方向および走行速度に基づく車両800の位置である自律位置を測位する自律測位部112と、道路上において天球CSが地物PFによって遮られる態様を示す天球情報Dspを含む道路地図情報Irmを記憶する記憶部120と、GPS信号を送信する複数のGPS衛星910の中から幾つかを天球情報Dspに基づいて選択する衛星選択部114と、選択されたGPS衛星910から送信されるGPS信号に基づく車両800の位置である他律位置を測位する他律測位部116と、測位された他律位置を用いて、自律位置に生じる累積誤差を補正する誤差補正部118とを備える。
(もっと読む)
ナビゲーション装置および移動体位置修正方法
【課題】 駐車場内の通路に道路データをあらかじめ登録しておくことなく、駐車場内における移動体の正確な位置を推定することが可能な「ナビゲーション装置および移動体位置修正方法」を提供する。
【解決手段】 駐車場への車両の進入が検出されたときに、地図データメモリ11に格納されている駐車場の描画データに基づいて、駐車場内に仮想的な道路リンクを設定する仮想道路リンク設定部15cと、仮想道路リンクを利用してマップマッチングを行うマップマッチング処理部15dとを備え、車両が駐車場内に進入すると、その時点で駐車場内に仮想道路リンクが設定され、設定された仮想道路リンクに対してマップマッチングが行われるようにして、駐車場内の通路に道路リンクを設定した膨大なデータ量の地図データをあらかじめ用意することなく、駐車場内における車両の正確な位置を推定できるようにする。
(もっと読む)
ナビゲーション装置の初期位置決定方法
【課題】本発明は、移動通信端末機の位置決定方法に関し、特に、移動通信端末機の位置を決定する無線測位の誤差を改善することで、測位の正確度を向上させるためのGPS衛星の配置を利用した歩行者ナビゲーション装置の初期位置決定方法に関する。
【解決手段】本発明は、ナビゲーション装置の初期位置決定方法において、閾値以上のGPS信号の強度で受信されるGPS(Global Positioning System)衛星の数を算出するステップと、前記受信されたGPS信号から少なくとも2領域の何れか一つに位置するGPS衛星の数を算出するステップと、前記各領域でのGPS衛星の数を比較した結果に従い、初期位置を決定するステップとを含む。
(もっと読む)
車両位置認識装置及び車両位置認識方法
【課題】 車両に搭載された撮像装置により撮像した画像情報に加えて、地図情報や車両情報等を用いることにより、走行中の道路の中における車両の位置をより詳細に特定することを可能とする車両位置認識装置及び車両位置認識方法を提供する。
【解決手段】 車両に搭載された撮像装置2により少なくとも道路の路面を撮像した画像情報を取り込む画像情報取得手段3と、地図情報から前記画像情報の撮像位置周辺の地物に関する道路特徴情報を取得する道路特徴情報取得手段9と、前記画像情報の認識処理を行い、前記画像情報の中に含まれる前記地物に対応する認識対象物の画像を認識する画像情報認識手段10と、道路特徴情報取得手段9により取得された前記道路特徴情報と、画像情報認識手段10により認識された前記認識対象物の画像の前記画像情報中の配置とに基づいて、車両の道路幅方向の位置を特定する車両位置特定手段17と、を備える。
(もっと読む)
航法装置、航法システム、航法測位方法、および車両
【課題】 搬送波差分型全地球測位システム(GPS)受信機とレーザスキャナを有する自律陸上用車両(AGV)のための水平航法システムを提供する。高精度の車両航法システムは先進AGVに強く求められている。高性能のRTK−GPS受信機によっても高い測位精度は得られるが、高い建物やその他の障害物により遮蔽された環境下では、その性能は著しく低下する。
【解決手段】 本発明の航法システムによれば、こうした苛酷な環境下であっても、正確なGPS測位に必要なデシメートルレベルの測位精度が得られる。水平航法システムは低価格の光ファイバージャイロ(FOG)と精密なオドメータから成る。航法誤差は密結合の拡張カルマンフィルタ(EKF)を使用して推定する。EKFの測定値としては二周波数GPS受信機からの二重差分型符号と搬送波位相及びレーザスキャナ測定から生じる相対位置がある。
(もっと読む)
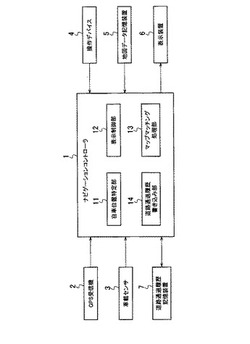
高さ情報を生成する衛星ナビゲーションシステム
車両用の衛星ナビゲーションシステム(100)が、車両が位置する地理的位置の標準高さ情報の生成機能を備える。このシステム(100)は、ナビゲーション衛星からの受信信号の関数として位置データを生成できる衛星受信器(110)を有し得る。この位置データは、軽度、緯度、および楕円高さの情報を有し得る。このシステム(100)は、起伏グリッドモデル(146)またはデジタル地図(142)中のある地理的範囲に対して起伏値を記憶し得る。このシステム(100)は、その位置の近似起伏値を決定し、その位置の標準高度値を計算し得る。 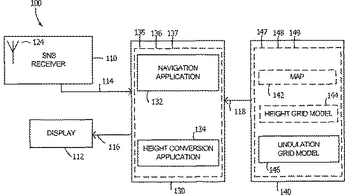 (もっと読む)
(もっと読む)
親局制御運行支援及び管理方法、移動体の位置決め方法
【課題】移動体の詳細な位置決めと、運行支援・管理機能の向上・効率化をはかる。
【解決手段】親局に地図情報を格納し、子局の衛星信号受信機構127、ジャイロスコープ129からの衛星信号及びジャイロ情報を親局やへ送る。親局では、衛星信号から当該移動体の大まかな位置を検出し、地図と合わせて正確な初期位置を決め、その後はその位置とジャイロ情報とから時系列的に地図上の位置を定め、それを子局へ送る。更に親局では各子局の各時点の位置から道路等に関する情報を収集し、これに基づく道路等の情報を子局へ送信する。
(もっと読む)
距離算出装置および算出プログラム
移動物体と対象物との間の方位角や、速度、ヨーレートなどの各種の状態量に基づいて、移動物体と対象物との間の距離を正確に算出することを目的とする。算出装置1は、移動物体と対象物との間の方位角を算出する手段2と、2つの時点間の移動物体の移動距離を算出する手段3と、移動方向の角度変化量を算出する手段4と、手段2、手段3、手段4の出力を用いて移動物体から対象物までの直線距離を算出する手段5とを備える。 (もっと読む)
61 - 75 / 75
[ Back to top ]