
ナビゲーション装置およびナビゲーション方法
【課題】マップマッチング機能を備えたナビゲーション装置において、地図データが更新されていないエリアを車両が走行している時に、車両の位置を正確に表示する。
【解決手段】最新の地図データに更新されているエリアを走行している時には、通常のマップマッチング処理を行い、最新の地図データに更新されていないエリアを車両が走行している場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、車両の位置を正確に表示することができる。
【解決手段】最新の地図データに更新されているエリアを走行している時には、通常のマップマッチング処理を行い、最新の地図データに更新されていないエリアを車両が走行している場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、車両の位置を正確に表示することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、マップマッチング機能を備えたナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
従来、自動車が通常、道路上を走行するという特徴を利用することにより、自車位置の検出誤差によって自車位置表示マークが道路上を外れた場合でも、強制的に近くの道路上に自車位置を補正して、自車位置のマークを表示するマップマッチング機能を備えたナビゲーション装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2004−226341号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、部分的にデータ更新可能な地図データを備えたナビゲーション装置において、地図データが更新されていないエリアを車両が走行しているときにマップマッチング処理が行われると、未更新の地図データには存在しない道路を走行している場合に、実際の道路とは異なる道路上に自車位置が補正されてしまうという問題が発生する。
【課題を解決するための手段】
【0005】
本発明によるナビゲーション装置およびナビゲーション方法は、車両の現在地を検出し、検出した車両位置、および、部分的にデータ更新が可能な地図データに基づいて、マップマッチングによる自車位置補正を行うものであって、検出した車両位置に基づいて、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定し、車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くすることを特徴とする。
【発明の効果】
【0006】
本発明によるナビゲーション装置およびナビゲーション方法によれば、車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くするので、未更新の地図データに基づいて、実際の道路とは異なる道路上に自車位置が補正されてしまうことを防ぐことができる。
【発明を実施するための最良の形態】
【0007】
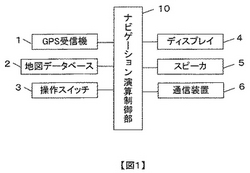
図1は、一実施の形態におけるナビゲーション装置の構成を示す図である。一実施の形態におけるナビゲーション装置は、GPS受信機1と、地図データベース2と、操作スイッチ3と、ディスプレイ4と、スピーカ5と、通信装置6と、ナビゲーション演算制御部10とを備える。
【0008】
GPS受信機1は、所定の間隔で、GPS衛星からの信号電波を受信して、車両の現在地を検出する。地図データベース2には、地図データが格納されている。この地図データには、推奨経路を演算するために用いられる経路計算データや、交差点名称、道路名称など、推奨経路に従って自車両を目的地まで案内するために用いられる経路誘導データ、道路形状を表す道路データ、海岸線や河川、鉄道、建物など、道路以外の地図形状を表す背景データ、および、POI(Point Of Interest)データ等が含まれている。POIデータには、各種施設の名称や位置、種類、電話番号などのデータが含まれる。
【0009】
地図データベース2に格納されている地図データは、メッシュと呼ばれる所定の大きさの矩形エリアを1単位として、データを更新することができる。データの更新は、例えば、最新の地図データが記憶されたCD−ROMなどを用いて行うことができる。このように、メッシュ単位で部分的に地図データを更新することにより、データが更新されたエリアの地図データ、または、ユーザが良く利用するエリアの地図データのみを効率良く、最新の地図データに書き換えることができる。
【0010】
操作スイッチ3は、道路地図表示画面の各種操作や、目的地の設定、施設の検索など、ユーザが各種の操作を行うためのスイッチである。ディスプレイ4は、後述するナビゲーション演算制御部10からの指示に基づいて、車両周辺の地図や、車両の現在地、および、目的地までの経路等を表示する。スピーカ5は、目的地までの経路案内等を音声出力する。通信装置6は、車両に配信するための様々なデータを所有している情報センターとの間で無線通信を行うことにより、様々なデータのやり取りを行う。
【0011】
ナビゲーション演算制御部10は、CPU、ROM、メモリ等を備え、車両の現在地を地図上に表示する処理や、目的地までの最適な経路を演算する処理等、ナビゲーションシステム全般の処理を行う。車両の現在地を地図上に表示する処理は、GPS受信機1で検出される車両の現在位置に基づいて行うが、車両の現在地が地図データ上の道路から外れている場合には、理論的に走行していると考えられる道路上に自車位置を補正するマップマッチング処理を行う。マップマッチングは既知の処理であるので、ここでは、その詳しい説明は省略する。
【0012】
ナビゲーション演算制御部10は、また、通信装置6を介して、最新の地図データを所有している情報センターとの間で定期的に通信を行うことにより、地図データベース2に格納されている地図データのうち、最新のデータに更新されているメッシュ(エリア)と、最新のデータに更新されていないメッシュ(エリア)とを識別する。最新の地図データに更新されているか否かの判定結果は、図示しないメモリに記憶しておく。
【0013】
一実施の形態におけるナビゲーション装置では、車両が走行しているエリアが最新の地図データに更新されているエリアであるか否かを判定し、最新の地図データに更新されていないエリアを走行している場合には、マップマッチング処理の利用頻度を低下させるとともに、GPS受信機1による自車位置検出精度を向上させる。GPS受信機1による自車位置検出精度の向上は、GPS衛星からの信号電波を受信する間隔を短くして、電波の受信頻度を高くすることにより行う。
【0014】
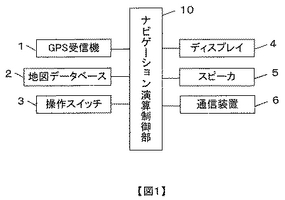
図2は、一実施の形態におけるナビゲーション装置により行われる処理内容を示すフローチャートである。ナビゲーション装置に電源が投入されて、ユーザが操作スイッチ3を操作することにより、自車位置をディスプレイ4に表示させる指令を出すと、ナビゲーション演算制御部10は、ステップS10の処理を開始する。
【0015】
ステップS10では、GPS受信機1によって検出される車両位置の情報を取得して、ステップS20に進む。ステップS20では、ステップS10で取得した車両位置の情報、および、地図データベース2に格納されている地図データに基づいて、車両が走行しているエリアを特定し、特定したエリアが、最新の地図データに更新されているエリアであるか否かを判定する。上述したように、ナビゲーション演算制御部10は、地図データベース2に格納されている地図データが最新の地図データに更新されているか否かをメッシュ単位で定期的に判定し、判定結果をメモリに記憶させている。従って、メモリに記憶されている更新判定結果に基づいて、車両の現在地を含むメッシュの地図データが最新の地図データであるか否かを判定する。車両が走行しているエリア(メッシュ)の地図データが最新の地図データに更新済みであると判定するとステップS30に進み、最新の地図データに更新されていないと判定すると、ステップS40に進む。
【0016】
ステップS30では、通常のマップマッチング処理を行う。一方、ステップS40では、マップマッチング処理の利用度を低下させて、GPS受信機1による位置検出精度を向上させる。上述したように、位置検出精度の向上は、GPS衛星からの信号電波をGPS受信機1にて受信する間隔を短くして、電波の受信頻度を高めることにより行う。ステップS30またはステップS40の処理によって求められる車両位置は、地図データとともに、ディスプレイ4に表示される。
【0017】
一実施の形態におけるナビゲーション装置によれば、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、地図データベース2に格納されている地図データ上には存在しないが、実際には存在する道路を車両が走行している場合に、マップマッチング処理によって、自車位置が別の道路上に補正されてしまうことを防ぐことができる。また、マップマッチング処理の利用度を低下させる代わりに、GPS受信機1による位置検出精度を向上させるので、自車位置の表示精度が低下するのを防ぐことができる。
【0018】
一実施の形態におけるナビゲーション装置では、GPS衛星からの信号電波を受信する間隔を短くして、電波の受信頻度を高くすることにより、自車位置の検出精度を向上させた。ここで、地図データが最新の地図データに更新されているか否かに関わらず、GPS衛星からの電波の受信頻度を常に高くしておくことも考えられるが、この場合には、受信した電波に基づいて、車両の現在地を検出する処理回数が増えるため、処理負荷が増大してしまう。しかし、一実施の形態におけるナビゲーション装置のように、最新の地図データに更新されていないエリアを車両が走行する場合にのみ、GPS衛星からの信号電波を受信する頻度を高くするので、上述したよう処理負荷の問題が生じることはない。
【0019】
本発明は、上述した一実施の形態に限定されることはない。例えば、最新の地図データに更新されていないエリアを走行する場合には、GPS受信機1によって検出された車両位置に基づく走行経路が、地図データベース2に格納されている地図データの道路上には無い場合がある。このような場合には、道路ではない場所を走行した際の走行経路データを、通信装置6を介して、情報センターに送信して、情報センターにデータを蓄積しておけば、情報センター側で新たな道路等を把握することができ、例えば、新たな道路を含む地図データを作成する際に利用することもできる。
【0020】
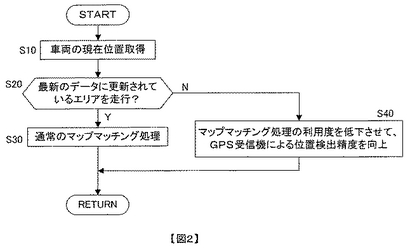
上述した一実施の形態では、GPS航法を利用して車両の現在地を検出する例を挙げたが、他の方法により、車両の位置を検出することもできる。図3は、GPS航法と自律航法とを併用して、車両の現在地を検出するナビゲーション装置の構成を示す図である。このナビゲーション装置では、図1に示すナビゲーション装置の構成に加えて、ジャイロセンサ11と、車速センサ12とを備える。ナビゲーション演算制御部10は、GPS受信機1によって検出される車両位置とともに、電波を受信できないトンネル内等を走行する場合には、ジャイロセンサ11によって検出される車両の進行方向、および、車速センサ12によって検出される車速に基づいて、車両の現在地を算出する。この場合でも、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、ジャイロセンサ11および車速センサ12のうち、少なくとも一方のセンサの精度を向上させることにより、車両の位置検出精度を向上させることができる。なお、車両の現在地を検出する方法は、これらの方法に限定されることはない。
【0021】
上述した一実施の形態では、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させた。しかし、地図データの更新時に、データがあまり変更されていない場合には、例えば、1バージョン前の地図データであっても、マップマッチング処理の利用度を低下させずに、通常のマップマッチング処理を行うようにしてもよい。
【0022】
地図データは、所定の大きさの矩形エリアであるメッシュを1単位として更新できるものとして説明したが、部分的にデータを更新できるのであれば、メッシュを1単位として更新する方法に限られることはない。
【0023】
ナビゲーション装置は、四輪車に搭載されるものに限られず、バス・トラックなどの大型車に搭載されるものであってもよいし、二輪車に搭載されるものであってもよい。
【0024】
なお、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における構成に何ら限定されない。
【0025】
特許請求の範囲の構成要素と一実施の形態の構成要素との対応関係は次の通りである。すなわち、GPS受信機1が現在地検出手段を、地図データベース2が地図データ格納手段を、ナビゲーション演算制御部10が位置補正手段、データ更新判定手段、および、制御手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素との対応関係に何ら限定されるものではない。
【図面の簡単な説明】
【0026】
【図1】一実施の形態におけるナビゲーション装置の構成を示す図
【図2】一実施の形態におけるナビゲーション装置により行われる処理内容を示すフローチャート
【図3】ナビゲーション装置の変形構成例を示す図
【符号の説明】
【0027】
1…GPS受信機、2…地図データベース、3…操作スイッチ、4…ディスプレイ、5…スピーカ、6…通信装置、10…ナビゲーション演算制御部
【技術分野】
【0001】
本発明は、マップマッチング機能を備えたナビゲーション装置およびナビゲーション方法に関する。
【背景技術】
【0002】
従来、自動車が通常、道路上を走行するという特徴を利用することにより、自車位置の検出誤差によって自車位置表示マークが道路上を外れた場合でも、強制的に近くの道路上に自車位置を補正して、自車位置のマークを表示するマップマッチング機能を備えたナビゲーション装置が知られている(特許文献1参照)。
【0003】
【特許文献1】特開2004−226341号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、部分的にデータ更新可能な地図データを備えたナビゲーション装置において、地図データが更新されていないエリアを車両が走行しているときにマップマッチング処理が行われると、未更新の地図データには存在しない道路を走行している場合に、実際の道路とは異なる道路上に自車位置が補正されてしまうという問題が発生する。
【課題を解決するための手段】
【0005】
本発明によるナビゲーション装置およびナビゲーション方法は、車両の現在地を検出し、検出した車両位置、および、部分的にデータ更新が可能な地図データに基づいて、マップマッチングによる自車位置補正を行うものであって、検出した車両位置に基づいて、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定し、車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くすることを特徴とする。
【発明の効果】
【0006】
本発明によるナビゲーション装置およびナビゲーション方法によれば、車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くするので、未更新の地図データに基づいて、実際の道路とは異なる道路上に自車位置が補正されてしまうことを防ぐことができる。
【発明を実施するための最良の形態】
【0007】
図1は、一実施の形態におけるナビゲーション装置の構成を示す図である。一実施の形態におけるナビゲーション装置は、GPS受信機1と、地図データベース2と、操作スイッチ3と、ディスプレイ4と、スピーカ5と、通信装置6と、ナビゲーション演算制御部10とを備える。
【0008】
GPS受信機1は、所定の間隔で、GPS衛星からの信号電波を受信して、車両の現在地を検出する。地図データベース2には、地図データが格納されている。この地図データには、推奨経路を演算するために用いられる経路計算データや、交差点名称、道路名称など、推奨経路に従って自車両を目的地まで案内するために用いられる経路誘導データ、道路形状を表す道路データ、海岸線や河川、鉄道、建物など、道路以外の地図形状を表す背景データ、および、POI(Point Of Interest)データ等が含まれている。POIデータには、各種施設の名称や位置、種類、電話番号などのデータが含まれる。
【0009】
地図データベース2に格納されている地図データは、メッシュと呼ばれる所定の大きさの矩形エリアを1単位として、データを更新することができる。データの更新は、例えば、最新の地図データが記憶されたCD−ROMなどを用いて行うことができる。このように、メッシュ単位で部分的に地図データを更新することにより、データが更新されたエリアの地図データ、または、ユーザが良く利用するエリアの地図データのみを効率良く、最新の地図データに書き換えることができる。
【0010】
操作スイッチ3は、道路地図表示画面の各種操作や、目的地の設定、施設の検索など、ユーザが各種の操作を行うためのスイッチである。ディスプレイ4は、後述するナビゲーション演算制御部10からの指示に基づいて、車両周辺の地図や、車両の現在地、および、目的地までの経路等を表示する。スピーカ5は、目的地までの経路案内等を音声出力する。通信装置6は、車両に配信するための様々なデータを所有している情報センターとの間で無線通信を行うことにより、様々なデータのやり取りを行う。
【0011】
ナビゲーション演算制御部10は、CPU、ROM、メモリ等を備え、車両の現在地を地図上に表示する処理や、目的地までの最適な経路を演算する処理等、ナビゲーションシステム全般の処理を行う。車両の現在地を地図上に表示する処理は、GPS受信機1で検出される車両の現在位置に基づいて行うが、車両の現在地が地図データ上の道路から外れている場合には、理論的に走行していると考えられる道路上に自車位置を補正するマップマッチング処理を行う。マップマッチングは既知の処理であるので、ここでは、その詳しい説明は省略する。
【0012】
ナビゲーション演算制御部10は、また、通信装置6を介して、最新の地図データを所有している情報センターとの間で定期的に通信を行うことにより、地図データベース2に格納されている地図データのうち、最新のデータに更新されているメッシュ(エリア)と、最新のデータに更新されていないメッシュ(エリア)とを識別する。最新の地図データに更新されているか否かの判定結果は、図示しないメモリに記憶しておく。
【0013】
一実施の形態におけるナビゲーション装置では、車両が走行しているエリアが最新の地図データに更新されているエリアであるか否かを判定し、最新の地図データに更新されていないエリアを走行している場合には、マップマッチング処理の利用頻度を低下させるとともに、GPS受信機1による自車位置検出精度を向上させる。GPS受信機1による自車位置検出精度の向上は、GPS衛星からの信号電波を受信する間隔を短くして、電波の受信頻度を高くすることにより行う。
【0014】
図2は、一実施の形態におけるナビゲーション装置により行われる処理内容を示すフローチャートである。ナビゲーション装置に電源が投入されて、ユーザが操作スイッチ3を操作することにより、自車位置をディスプレイ4に表示させる指令を出すと、ナビゲーション演算制御部10は、ステップS10の処理を開始する。
【0015】
ステップS10では、GPS受信機1によって検出される車両位置の情報を取得して、ステップS20に進む。ステップS20では、ステップS10で取得した車両位置の情報、および、地図データベース2に格納されている地図データに基づいて、車両が走行しているエリアを特定し、特定したエリアが、最新の地図データに更新されているエリアであるか否かを判定する。上述したように、ナビゲーション演算制御部10は、地図データベース2に格納されている地図データが最新の地図データに更新されているか否かをメッシュ単位で定期的に判定し、判定結果をメモリに記憶させている。従って、メモリに記憶されている更新判定結果に基づいて、車両の現在地を含むメッシュの地図データが最新の地図データであるか否かを判定する。車両が走行しているエリア(メッシュ)の地図データが最新の地図データに更新済みであると判定するとステップS30に進み、最新の地図データに更新されていないと判定すると、ステップS40に進む。
【0016】
ステップS30では、通常のマップマッチング処理を行う。一方、ステップS40では、マップマッチング処理の利用度を低下させて、GPS受信機1による位置検出精度を向上させる。上述したように、位置検出精度の向上は、GPS衛星からの信号電波をGPS受信機1にて受信する間隔を短くして、電波の受信頻度を高めることにより行う。ステップS30またはステップS40の処理によって求められる車両位置は、地図データとともに、ディスプレイ4に表示される。
【0017】
一実施の形態におけるナビゲーション装置によれば、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させる。これにより、地図データベース2に格納されている地図データ上には存在しないが、実際には存在する道路を車両が走行している場合に、マップマッチング処理によって、自車位置が別の道路上に補正されてしまうことを防ぐことができる。また、マップマッチング処理の利用度を低下させる代わりに、GPS受信機1による位置検出精度を向上させるので、自車位置の表示精度が低下するのを防ぐことができる。
【0018】
一実施の形態におけるナビゲーション装置では、GPS衛星からの信号電波を受信する間隔を短くして、電波の受信頻度を高くすることにより、自車位置の検出精度を向上させた。ここで、地図データが最新の地図データに更新されているか否かに関わらず、GPS衛星からの電波の受信頻度を常に高くしておくことも考えられるが、この場合には、受信した電波に基づいて、車両の現在地を検出する処理回数が増えるため、処理負荷が増大してしまう。しかし、一実施の形態におけるナビゲーション装置のように、最新の地図データに更新されていないエリアを車両が走行する場合にのみ、GPS衛星からの信号電波を受信する頻度を高くするので、上述したよう処理負荷の問題が生じることはない。
【0019】
本発明は、上述した一実施の形態に限定されることはない。例えば、最新の地図データに更新されていないエリアを走行する場合には、GPS受信機1によって検出された車両位置に基づく走行経路が、地図データベース2に格納されている地図データの道路上には無い場合がある。このような場合には、道路ではない場所を走行した際の走行経路データを、通信装置6を介して、情報センターに送信して、情報センターにデータを蓄積しておけば、情報センター側で新たな道路等を把握することができ、例えば、新たな道路を含む地図データを作成する際に利用することもできる。
【0020】
上述した一実施の形態では、GPS航法を利用して車両の現在地を検出する例を挙げたが、他の方法により、車両の位置を検出することもできる。図3は、GPS航法と自律航法とを併用して、車両の現在地を検出するナビゲーション装置の構成を示す図である。このナビゲーション装置では、図1に示すナビゲーション装置の構成に加えて、ジャイロセンサ11と、車速センサ12とを備える。ナビゲーション演算制御部10は、GPS受信機1によって検出される車両位置とともに、電波を受信できないトンネル内等を走行する場合には、ジャイロセンサ11によって検出される車両の進行方向、および、車速センサ12によって検出される車速に基づいて、車両の現在地を算出する。この場合でも、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、ジャイロセンサ11および車速センサ12のうち、少なくとも一方のセンサの精度を向上させることにより、車両の位置検出精度を向上させることができる。なお、車両の現在地を検出する方法は、これらの方法に限定されることはない。
【0021】
上述した一実施の形態では、最新の地図データに更新されていないエリアを車両が走行する場合には、マップマッチング処理の利用度を低下させるとともに、GPS受信機1による自車位置の検出精度を向上させた。しかし、地図データの更新時に、データがあまり変更されていない場合には、例えば、1バージョン前の地図データであっても、マップマッチング処理の利用度を低下させずに、通常のマップマッチング処理を行うようにしてもよい。
【0022】
地図データは、所定の大きさの矩形エリアであるメッシュを1単位として更新できるものとして説明したが、部分的にデータを更新できるのであれば、メッシュを1単位として更新する方法に限られることはない。
【0023】
ナビゲーション装置は、四輪車に搭載されるものに限られず、バス・トラックなどの大型車に搭載されるものであってもよいし、二輪車に搭載されるものであってもよい。
【0024】
なお、本発明の特徴的な機能を損なわない限り、本発明は、上述した実施の形態における構成に何ら限定されない。
【0025】
特許請求の範囲の構成要素と一実施の形態の構成要素との対応関係は次の通りである。すなわち、GPS受信機1が現在地検出手段を、地図データベース2が地図データ格納手段を、ナビゲーション演算制御部10が位置補正手段、データ更新判定手段、および、制御手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素との対応関係に何ら限定されるものではない。
【図面の簡単な説明】
【0026】
【図1】一実施の形態におけるナビゲーション装置の構成を示す図
【図2】一実施の形態におけるナビゲーション装置により行われる処理内容を示すフローチャート
【図3】ナビゲーション装置の変形構成例を示す図
【符号の説明】
【0027】
1…GPS受信機、2…地図データベース、3…操作スイッチ、4…ディスプレイ、5…スピーカ、6…通信装置、10…ナビゲーション演算制御部
【特許請求の範囲】
【請求項1】
車両の現在地を検出する現在地検出手段と、
部分的にデータ更新が可能な地図データを格納する地図データ格納手段と、
前記現在地検出手段によって検出された位置、および、前記地図データ格納手段に格納されている地図データに基づいて、マップマッチングによる自車位置補正を行う位置補正手段と、
前記現在地検出手段によって検出された現在地に基づいて、前記地図データ格納手段に格納されている地図データのうち、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定するデータ更新判定手段と、
前記データ更新判定手段によって、車両が走行しているエリアの地図データが新しい地図データではないと判定されると、前記位置補正手段による自車位置補正処理の利用頻度を低下させるとともに、前記現在地検出手段による現在地の検出精度を高くする制御手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記現在地検出手段は、GPS衛星から電波を受信し、受信した電波に基づいて、車両の現在地を検出するものであって、
前記制御手段は、前記現在地検出手段がGPS衛星から電波を受信する頻度を多くすることによって、現在地の検出精度を高くすることを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置において、
前記現在地検出手段は、車両の進行方向を検出する進行方向検出手段、および、車両の速度を検出する車速検出手段を備え、前記進行方向検出手段によって検出される進行方向および前記車速検出手段によって検出される車速に基づいて、車両の現在地を算出するものであって、
前記制御手段は、前記車速検出手段および前記進行方向検出手段のうち、少なくとも一方の検出手段の検出精度を向上させることによって、現在地の検出精度を高くすることを特徴とするナビゲーション装置。
【請求項4】
車両の現在地を検出し、検出した車両位置、および、部分的にデータ更新が可能な地図データに基づいて、マップマッチングによる自車位置補正を行うナビゲーション方法において、
検出した車両位置に基づいて、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定し、
車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くすることを特徴とするナビゲーション方法。
【請求項1】
車両の現在地を検出する現在地検出手段と、
部分的にデータ更新が可能な地図データを格納する地図データ格納手段と、
前記現在地検出手段によって検出された位置、および、前記地図データ格納手段に格納されている地図データに基づいて、マップマッチングによる自車位置補正を行う位置補正手段と、
前記現在地検出手段によって検出された現在地に基づいて、前記地図データ格納手段に格納されている地図データのうち、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定するデータ更新判定手段と、
前記データ更新判定手段によって、車両が走行しているエリアの地図データが新しい地図データではないと判定されると、前記位置補正手段による自車位置補正処理の利用頻度を低下させるとともに、前記現在地検出手段による現在地の検出精度を高くする制御手段とを備えることを特徴とするナビゲーション装置。
【請求項2】
請求項1に記載のナビゲーション装置において、
前記現在地検出手段は、GPS衛星から電波を受信し、受信した電波に基づいて、車両の現在地を検出するものであって、
前記制御手段は、前記現在地検出手段がGPS衛星から電波を受信する頻度を多くすることによって、現在地の検出精度を高くすることを特徴とするナビゲーション装置。
【請求項3】
請求項1に記載のナビゲーション装置において、
前記現在地検出手段は、車両の進行方向を検出する進行方向検出手段、および、車両の速度を検出する車速検出手段を備え、前記進行方向検出手段によって検出される進行方向および前記車速検出手段によって検出される車速に基づいて、車両の現在地を算出するものであって、
前記制御手段は、前記車速検出手段および前記進行方向検出手段のうち、少なくとも一方の検出手段の検出精度を向上させることによって、現在地の検出精度を高くすることを特徴とするナビゲーション装置。
【請求項4】
車両の現在地を検出し、検出した車両位置、および、部分的にデータ更新が可能な地図データに基づいて、マップマッチングによる自車位置補正を行うナビゲーション方法において、
検出した車両位置に基づいて、車両が走行しているエリアの地図データが新しい地図データであるか否かを判定し、
車両が走行しているエリアの地図データが新しい地図データではないと判定すると、マップマッチングによる自車位置補正処理の利用頻度を低下させるとともに、車両位置の検出精度を高くすることを特徴とするナビゲーション方法。
【図1】


【図2】
【図3】

【図2】
【図3】
【公開番号】特開2006−275564(P2006−275564A)
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願番号】特願2005−90955(P2005−90955)
【出願日】平成17年3月28日(2005.3.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成18年10月12日(2006.10.12)
【国際特許分類】
【出願日】平成17年3月28日(2005.3.28)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]