
Fターム[2F129BB54]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 傾斜補正 (191)
Fターム[2F129BB54]の下位に属するFターム
Fターム[2F129BB54]に分類される特許
1 - 20 / 64
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の位置を正確に検出することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が分岐点を直進して通過する場合に、バックカメラ19で撮像した画像に基づいて車両が走行する道路上に存在する地物を検出し(S13)、検出された地物の配置パターンである検出配置パターンが、分岐点へ進入する進入道路上に設けられた地物の配置パターンである進入側配置パターンと一致する場合に、分岐点の周辺に設けられた地物又は分岐点のノードとの相対位置によって移動体の位置を特定する(S18、S19)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム

【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両の走行距離を検出する為の車速センサ22の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定する(S41〜S43)とともに、車両の方位変化を検出する為のジャイロセンサ24の検出誤差が、車両の検出位置に対して誤差を生じさせる方向を特定し(S44〜S46)、特定された方向に基づいて車両の検出位置の誤差範囲を推定する(S47)ように構成する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の移動によって移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
【解決手段】車両が走行する道路の車線数から車両が走行中の道路で行うことができる最大の車線変更回数を特定し(S52)、特定された最大の車線変更回数に基づいて車両の検出位置の誤差範囲を推定する(S53)ように構成する。
(もっと読む)
勾配推定装置
【課題】勾配急変時、勾配変化初期、又は、加減速中であっても勾配を高い精度で推定できるようにする。
【解決手段】勾配推定装置11は、車両1の運転状態に基づき車両1に作用する重量勾配抵抗を演算し、演算された重量勾配抵抗に基づき車両1が走行中の勾配を推定し、これを内部勾配演算値とする。また、勾配推定装置11は、ナビゲーションシステム28から車両が走行中の勾配を取得し、これをナビ勾配とする。そして、勾配推定装置11は、内部勾配演算値とナビ勾配との差分に基づき内部勾配演算値を補正する。
(もっと読む)
移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラム
【課題】移動体の検出位置に対して生じる誤差範囲を正確に推定することを可能にした移動体位置検出システム、移動体位置検出装置、移動体位置検出方法及びコンピュータプログラムを提供する。
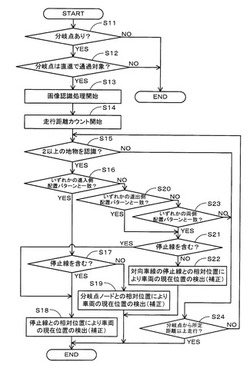
【解決手段】停止線を認識対象とした高精度ロケーションシステムを用いて、最も新しく認識した停止線から車両の現在位置を検出し、検出された停止線の道路幅に対する傾斜角度を取得し、停止線における座標特定点の配置と停止線の傾斜角度とに基づいて、検出した車両の位置の誤差範囲を推定し、検出された車両の現在位置と推定された誤差範囲を用いて車両が案内開始地点に到達したか否か判定し、車両が案内開始地点に到達したと判定された時に、案内分岐点の案内を開始するように構成する。
(もっと読む)
外部アプリケーションへデータを供給するための方法
【課題】外部アプリケーションへデータを供給するための方法が提供される。
【解決手段】移動する対象物が静止している場所を、場所と時刻からなるサイティングの記録を形成すべく定期的に記録される。そして、サイティングの記録は、データが供給される外部アプリケーションによって特定される少なくとも1つの規準に従って分析される。少なくとも1つの規準に合致する記録からサイティングのリストが、外部アプリケーションの使用のために供給される。
(もっと読む)
道路の傾斜角度検出装置および現在位置算出装置
【課題】道路の傾斜角度の検出精度および現在位置の算出精度を向上させる。
【解決手段】ドア開閉スイッチ12の出力信号の変化を検出すると、車両の重量配分の変動があるとみなして、車両の傾斜角度αの情報を再度学習して取得するように構成した。これにより、車両が走行する道路の傾斜角度θが正しく算出されて、車両の高さ位置および水平方向の位置が正しく算出されるようになる。したがって、車両の現在位置が正しく算出されるようになる。
(もっと読む)
ナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラム
【課題】経路なし走行モード時や、交差点付近に現在位置がある場合であっても、交差点の中心に現在位置を固定表示させることなく、より現実の現在位置に忠実な現在位置の表示を行うことができるナビゲーションシステム、ナビゲーション装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明は、対象車両の現在位置情報により、道路ネットワークデータを用いて、現在位置情報により道路ネットワークデータ上の交差点付近における対象車両の旋回を検出し、交差点付近における対象車両の旋回を検出した場合に、当該交差点への進入リンクおよび当該対象車両の旋回方向の退出リンクの双方に対し相対的な傾きが近似的に0で接する軌道曲線を取得し、表示部を介して、取得した軌道曲線上に現在位置情報を表示させる。
(もっと読む)
車載勾配推定装置、勾配推定方法
【課題】車両がブレーキング中であっても正しい勾配を推定できるようにする。
【解決手段】第一勾配推定部104は、車両情報取得部101から出力された車両情報に基づいて、自車両の走行地点の勾配を推定するための演算を行う。第二勾配推定部105は、高度情報取得部102からの高度情報や、走行地点情報取得部103からの走行地点情報、記憶部107に記憶されている過去の勾配履歴などに基づいて、自車両の走行地点の勾配を推定するための演算を行う。選択部106は、自車両のブレーキがオフである場合は第一勾配推定部104を選択し、ブレーキがオンである場合は第二勾配推定部105を選択するようにスイッチを切り替える。
(もっと読む)
道路勾配計測装置及び道路勾配計測方法
【課題】道路勾配の計測精度の向上を図る。
【解決手段】GPS12の受信感度が所定のレベル以上であって標高に変化が検出された場合、勾配算出部25は、GPSデータ取得部21によりGPS12から取得された走行速度、標高等のデータを用いて道路の勾配を算出する。標高に変化がないとき、定地走行抵抗算出部22は、ECUデータ取得部23により取得されたECUデータを用いて定地走行抵抗を算出し、定地走行抵抗保持部27に保持させる。このときの勾配は0である。GPS12の受信感度が所定のレベルに達していないとき、勾配算出部25は、保持されている定地走行抵抗とECUデータ取得部23により取得されたECUデータを用いて道路の勾配を算出する。
(もっと読む)
現在位置表示装置、及び現在位置表示方法
【課題】ジャイロスコープの出力を用いて現在位置を精度良く地図上に表示すること。
【解決手段】現在位置検出手段と、地図データベースと、マップマッチング手段と、表示制御手段と、表示手段と、を備える現在位置表示装置は、さらに角速度の変化を検出する傾斜判定手段と、を備え、前記現在位置検出手段によって仮想現在位置を検出し、前記傾斜判定手段によって検出された角速度に基づいて前記傾斜判定手段が傾斜角度を算出し、前記傾斜角度に基づいて地図データベースを参照して前記仮想現在位置付近の前記候補となるリンクに対する信頼度を算出し、前記マップマッチング手段がより信頼度の高いリンク上にマッチング処理し、前記表示制御手段が前記マッチング処理された現在位置を地図画像と共に前記表示手段に表示する。
(もっと読む)
ナビゲーション装置
【課題】道路傾斜による影響を排除し取付角度を正確に求めることができるナビゲーション装置を提供することを目的とする。
【解決手段】車両に取付をした取付台に任意の角度で設置することができるナビゲーション装置1であって、互いに直交する3つの軸の各方向の加速度を検出する3軸加速度センサ4と、ナビゲーション装置1の取付角度を算出する制御部2とを備え、制御部2は、3軸加速度センサ4が車両走行中に検出した加速度の2つの軸についてそれぞれの方向の加速度である第1および第2加速度を取得し、この第1および第2加速度の絶対値の比率および加速度の極性により取付角度を算出する。
(もっと読む)
地図表示装置、制御方法、プログラム、及び記憶媒体
【課題】分岐地点通過後に車両が走行した道路を適切に特定可能な地図表示装置を提供する。
【解決手段】地図表示装置は、車両などの移動体に設置され、記憶部と、傾斜角度計測手段と、走行道路特定手段と、判定手段と、傾斜角度記憶手段と、を備える。記憶部は、地図情報を記憶する。傾斜角度計測手段は、移動体が走行した道路の傾斜角度を計測する。走行道路特定手段は、複数の分岐後道路に分岐する分岐地点を通過する場合であって、当該分岐後道路のうち少なくとも1の道路の傾斜角度が記憶部に記憶されていた場合、当該傾斜角度と、傾斜角度計測手段により計測された計測傾斜角度と、に基づき、分岐後道路から、前記移動体の走行道路の特定を行う。判定手段は、傾斜角度に基づく走行道路の特定が誤りであるか否か判定する。傾斜角度記憶手段は、傾斜角度に基づく走行道路の特定が誤りであると判断した場合、計測傾斜角度を記憶部に記憶させる。
(もっと読む)
傾斜角検出装置、傾斜角検出方法、および傾斜角検出プログラム
【課題】加速度センサのオフセットを高精度に算出することによって、傾斜角を高精度に検出する技術を提供する。
【解決手段】加速度センサ12は、加速度信号を取得し、速度センサ10は、速度信号を取得する。誤差設定部14は、加速度センサ12の観測誤差を設定する。ゲイン演算部24、状態変数更新部26は、加速度センサ12の観測誤差と、加速度信号と、速度信号とをもとにカルマンフィルタ処理を実行することによって、車両の傾斜角と加速度センサ12のオフセットとを更新する。ここで、誤差設定部14は、速度信号と、既に更新した車両の傾斜角とをもとに、加速度センサ12の観測誤差を設定する。
(もっと読む)
測位システム
【課題】GNSSにより測位される位置の誤差を推定することができる測位システムを提供すること。
【解決手段】衛星から受信した電波の到達時間から車両と衛星間の観測距離を計算する観測距離計算手段と、衛星から受信した位置情報に基づき所定時間の衛星の移動量ベクトルを推定する衛星移動ベクトル推定手段と、車両が走行しているリンクの勾配を推定する勾配推定手段と、車両の移動方向と前記勾配から、所定時間の車両の移動量ベクトルを推定する車両移動ベクトル推定手段と、衛星の移動量ベクトルと車両の移動量ベクトルとを比較して、衛星と車両間の推定距離の変化量を推定する距離変化量推定手段と、所定時間の観測距離の変化量を求め、推定距離の変化量と比較して衛星から受信する電波の信頼度を推定する信頼度推定手段と、信頼度に応じて衛星から受信した電波を処理し、車両の位置を推定する測位手段と、を有することを特徴とする測位システムを提供する。
(もっと読む)
移動体搭載用機器
【課題】低コストかつ簡単な演算で精度良く移動体の移動距離を算出するようにした移動体搭載用機器を提供する。
【解決手段】移動体の加速度を検出する加速度センサ131と、検出される加速度について動的加速度と静的加速度とを判別するための条件を記憶する閾値記憶部191と、判別条件に基づいて、加速度センサ131から出力された出力信号から動的加速度を判定する動的加速度判定部181と、判定された動的加速度に基づいて、移動体の移動距離を算出する移動距離算出部183と、を備えるように構成する。
(もっと読む)
移動体搭載用機器
【課題】加速度センサの取り付け角度に関係なく、正確に移動体搭載用機器の取り付け角度を算出することが可能な移動体搭載用機器を提供する。
【解決手段】移動体の3軸方向への加速度を検出する加速度センサ131と、移動体が停止状態にある際に加速度センサ131から出力される出力信号に基づいて、重力加速度を算出する重力加速度算出部181と、移動体が加減速移動状態にある際に加速度センサ131から出力される出力信号に基づいて、移動体の移動体加速度を算出する移動体加速度算出部182と、算出された重力加速度と算出された移動体加速度とに基づいて、前記移動体に対する移動体搭載用機器の取り付け角度を算出する取り付け角度算出部183と、を備えるように構成する。
(もっと読む)
駐車場進入/脱出検出装置及びその検出方法
【目的】駐車場進入/脱出を正確に判定できる「駐車場進入/脱出検出装置及びその検出方法」を提供することである。
【構成】 所定のタイミングで平面及び高さ方向の移動距離を計算し、上記移動距離を用いて勾配を計算し、勾配の絶対値が設定値より大きくなったとき、駐車場に進入したと判定する。前記駐車場進入が検出されたときの車両の相対高度を範囲内に含む所定の高度範囲を設定し、自車位置が前記高度範囲内に存在する場合は、脱出判定に使用する設定距離を小さくし、前記高度範囲外に存在する場合は前記設定距離を大きくし、道路と併走する併走距離を算出し、該併走距離が前記設定距離以上になったとき駐車場から脱出したと判定する。
(もっと読む)
車両用ナビゲーション装置及びナビゲーション方法
【課題】標高データを含む地図データを利用して道路が傾斜していても車両の進行方向を的確に表示することができる車両用ナビゲーション装置を提供する。
【解決手段】道路地図及び道路の標高データを含む地図データを記憶したデータベースと、車両の出発地から目的地までの経路をデータベースから探索し、車両の進行方位を案内するガイド画像を生成するナビゲータと、車両の傾き角を検出する角度センサと、ガイド画像を表示する表示装置と、データベースから標高データを取得し進行先の道路の傾斜角を算出する算出部と、方位変更点から先の道路が所定の角度以上の傾斜角を有する場合に、道路の傾斜角と車両の傾き角に応じてガイド画像の進行方位の角度を補正する補正部と、を具備する。
(もっと読む)
走行軌跡演算装置、走行軌跡演算方法及び走行軌跡演算プログラム
【課題】地図上における車両の走行軌跡の精度を向上することができる走行軌跡演算装置、走行軌跡演算方法及び走行軌跡演算プログラムを提供する。
【解決手段】ナビゲーション装置2は、処理対象区間の自車両の走行軌跡を車載センサ5に基づき算出し、処理対象区間の道路建設時期を判定し、道路建設時期に応じて規定された道路構造規定に基づき道路の勾配を定めた各テーブル21,22を記憶した道路法令記憶部20から、処理対象区間の道路建設時期に対応した勾配規定情報を取得し、取得した勾配規定情報に基づき、算出した走行軌跡情報を補正する。
(もっと読む)
1 - 20 / 64
[ Back to top ]