
Fターム[2F129BB56]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正方法 (4,075) | 傾斜補正 (191) | 地図データ利用 (75)
Fターム[2F129BB56]に分類される特許
21 - 40 / 75
情報表示装置、経路設定方法およびプログラム

【課題】外部からの測位が困難な状況下においても位置表示の誤差を少なくすること。
【解決手段】現在位置情報を取得するGPS受信機19と、音声を取得して解析する音声解析部17と、音声解析部17により解析した音声が、GPS受信機19により取得した現在位置情報が示す現在位置または現在位置周辺の施設に関連する特徴的な音声であり、且つ特徴的な音声を取得したときのGPS受信機19による現在位置情報が、特徴的な音声に関する施設ではない場合、当該施設を現在位置として補正する制御部24と、を備える。
(もっと読む)
分岐路進入判断装置及び分岐路進入判断方法

【課題】自車両が分岐路に進入したことを確実に検出することができる分岐路進入判断装置等を提供する。
【解決手段】自車両の前方方向に分岐路が存在することを検出した場合に、単眼カメラ3により撮像した撮像画像に基づいて、カメラコントローラ4により認識された右側白線認識結果と左側白線認識結果との組み合わせから、コントローラ10が、自車両が分岐路に進入したと判断する。自車両が分岐路に進入した場合に、ナビゲーション装置2の位置補正部2dにより位置を補正できる。
(もっと読む)
ナビゲーション装置
【課題】センサフュージョンに利用するセンサが増えた場合であっても、現在地の推定に必要な計算量が低く抑えられたナビゲーション装置を提供する。
【解決手段】ROM34には、種々の状況において各センサに与えられる重みが設定された特性テーブルが記憶されている。CPU31は、現在地の推定処理を行った後、推定された現在地、地図データ、および実行中の処理などの情報を特性テーブルに当てはめ、各々のセンサの重みを算出する。4つのセンサ22a〜22dのうち、重みが所定のしきい値よりも小さいセンサは、CPU31が制御するスイッチ群32により遮断され、CPU31への検出値の出力が行われなくなる。その結果、CPU31はこのセンサを現在地の推定に利用しなくなる。
(もっと読む)
位置検出装置および位置検出プログラム
【課題】車両に搭載されたセンサの時系列に変化するセンサ誤差から生じる自車位置の誤差を考慮した上で、精度の高いマップマッチング処理を行う位置検出装置および位置検出プログラムを提供する。
【解決手段】位置検出装置1は、GPS受信機21、角速度センサ22および車速センサ23を含む検知部20からの情報に基づき自車位置および誤差分散を計算し、その計算した自車位置、誤差分散、および地図情報DB600に記憶された地図データを用いて、自車位置周辺の道路データについてマップマッチング処理を行う。そして、位置検出装置1は、マップマッチング処理を行った各道路データのマップマッチング候補点のうち、最も尤度の高い候補点を地図上の自車位置に選定することを特徴とする。
(もっと読む)
ナビゲーション装置
【課題】自動車専用道路等を利用する際、利便性に優れたナビゲーション装置を得る。
【解決手段】移動体の現在位置を特定する自車位置特定部9と、ユーザの操作を入力する操作入力部3と、地図のデータを取得する地図情報取得部5と、道路判定部10と、複数経路探索部12と、複数経路表示生成部17とを備える。道路判定部10は、自車位置特定部9からの現在位置と地図情報取得部5からの地図データを用い、現在位置が特定の場所からの乗降に制限される乗降部を有する特定の道路であるかを判断する。複数経路探索部12は、地図データを用い、現在位置が特定の道路であるときは操作入力部3で入力された目的地までの異なる乗降部を使う経路を複数探索し、現在位置が特定の道路ではないときは特定の道路までの異なる乗降部を使う経路を複数探索する。複数経路表示生成部17は、複数経路探索部12で探索された複数の経路を表示部7に表示するものである。
(もっと読む)
受信機
【課題】受信装置を搭載した移動体が走行している道路情報を取得し、取得した道路の軌道と受信信号から得られる情報とを用いて測位し、取得する道路情報を限定した受信装置を提供することにある。
【解決手段】移動体に備え付けられる受信装置であって、衛星信号受信手段が衛星から衛星信号を受信し、信号処理手段が前記衛星信号から衛星位置情報と、誤差を含んだ前記衛星から前記受信装置までの距離である擬似距離情報とを算出し、道路情報取得手段が、限定された道路に関する3次元の道路情報を取得し、測位計算手段が前記道路情報に基づいた軌道、前記衛星位置情報、及び前記擬似距離情報に基づいて前記受信機の位置情報を算出する。
(もっと読む)
デジタル地図の事象情報受信装置および送信装置並びに事象情報の活用方法
【課題】得られた道路の事象情報とデジタル地図上の道路との乖離度合いを反映した評価値を算出し、活用に供する。
【解決手段】対象道路の形状を示す座標列からなる位置参照情報と対象道路における事象内容情報とを含む事象情報を受信し、デジタル地図上で対象道路を特定し、事象情報を活用する受信装置20であって、位置参照情報と事象内容情報とを含む事象情報を受信する受信部21と、受信部21によって受信した位置参照情報に基づき、デジタル地図上で対応する対象道路を特定する位置特定部22と、特定した対象道路における事象内容を活用する事象情報活用部25と、を備え、位置特定部22は、受信した位置参照情報と、デジタル地図上に存在する対応する対象道路との間の乖離度合いを示す評価値を算出し、事象情報活用部25は、事象内容情報と評価値の組み合わせに応じて、受信した事象情報の活用態様を変更する。
(もっと読む)
電波状況計測装置および電波状況計測方法
【課題】移動体上で計測を行う場合でも、正確に計測位置を特定することが可能な電波状況計測装置および電波状況計測方法を提供する。
【解決手段】電波記録処理手段205bは、受信部100の測定サンプルを、時計手段205aの測定時刻に対応付けて測定データ204bとして記憶部204に記録する。また、経路設定処理手段205cは、操作部203を通じてオペレータが地図上で指定した位置とこれに対応する存在時刻とを対応付けて経路データ204cとして記憶部204に記録する。そして、計測位置推定処理手段205dは、経路データ204cから移動速度を推定して、測定データ204bの測定サンプルの測定位置を推定して、この推定結果を表示処理手段205eが地図上に表示するようにしたものである。
(もっと読む)
推測航法における高度成分の調整
ここに開示される主題は、センサーによる推測航法に少なくとも部分的に基づいて推定所在の高度成分を調整することに関する。 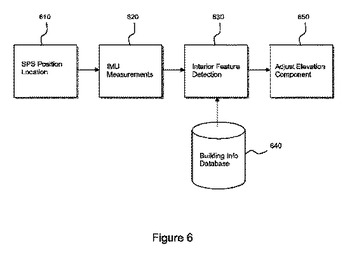 (もっと読む)
(もっと読む)
個別宅配システム及びそれに適合するナビゲーションシステム
【課題】個別宅配を可能にする個別宅配システムに用いられるデータベースとそのメンテナンスシステム、ナビゲーションシステムを提供する。
【解決手段】個別宅配システムは、道路単位として各道路単位ごとの属性情報を含む道路データ、建物、敷地の属性情報を含む地図データベースDB−11、同一配送日の宅配先を結ぶ順路データベースDB−16を備えている。また、宅配範囲の最小単位を定義する最小配達単位と複数の最小配達範囲から構成される配達員の配達単位の情報とを格納する区域データベースDB−18が設けられ、配達順路は上記順路データベースDB−16に格納される。個別宅配のナビゲーションシステム800においては、GPSの測定誤差の補正手法や、静止時の方角の取得手法、地図データと位置情報に基く現在位置の推定手法等が採用され、音声ナビゲーションや連続宅配ナビゲーションなどを実現している。
(もっと読む)
車両位置検出装置及び車両位置検出方法
【課題】目標物までの距離を考慮して極めて高精度で自車両の位置を検出及び補正することができる車両位置検出装置を提供する。
【解決手段】車両用ナビゲーションシステムは、道路上に設置されているキロポストの位置、形状、色、及び文字を含む情報を記憶部15cに予め記憶しておき、その記憶部15cに記憶されている情報に基づいて、自車両周囲の映像を撮像するカメラ11によって撮像された映像から目標物としてのキロポストを画像認識部15aによって画像認識し、表示装置14に表示する地図上の自車両位置を、画像認識部15aによって画像認識されたキロポストの位置であって記憶部15cに記憶されているキロポストの位置に移動させて自車両位置を補正する。
(もっと読む)
標定装置、標定方法および標定プログラム
【課題】車両の位置姿勢を標定できるようにする。
【解決手段】消失点抽出部120は、画像センサ104により車両から撮像された画像204に基づいて画像204に映っている白線の消失点実測値205を算出する。航法演算部110は、慣性センサ101とオドメトリ102とにより計測された角速度201と速度202とに基づいて車両の自己姿勢角207と自己位置206とを計測する。データベース検索部130は自己位置206と自己姿勢角207とに基づいて画像204に映っている白線の白線座標203を取得する。消失点計算部140は白線座標203と自己姿勢角207とに基づいて消失点予測値208を算出する。カルマンフィルタ部160は消失点実測値205と消失点予測値208との差分である消失点残差209に基づいて姿勢誤差推定量210を算出する。そして、航法演算部110は自己姿勢角207を姿勢誤差推定量210により補正する。
(もっと読む)
ナビゲーション装置
【課題】車両が駐車場に進入したことを検出するナビゲーション装置を提供する。
【解決手段】フロントカメラ19により車両前方を撮像する。フロントカメラ19により撮像された路面の画像40Aについて、輝度変化の大きいエッジを抽出する。エッジを抽出したエッジ画像40Bに基づいて、路面の白線を認識し、認識した白線が駐車場の区画であるか否かを判定することにより、車両が駐車場に進入したことを検出する。車両が駐車場に進入したことを検出すると、マップマッチングを行わない。
(もっと読む)
車両制御装置
【課題】 高価な機器を用いることなく、自車両の走行位置の補正を確実に行うことができる車両制御装置を提供する。
【解決手段】 車両制御装置1は、自車両の現在位置(走行位置)を検出するGPSナビゲーション2と、自車両の走行速度を検出する車速センサ3と、自車両が走行する走行路における周辺環境の照度を検出するコンライトセンサ4と、ECU5とを備えている。ECU5は、GPSナビゲーション2により取得された自車両の現在位置情報に基づいて、自車両がGPSナビゲーション2のメモリ2aに記憶されている照度変化地点の手前位置に達したと判断され、更にコンライトセンサ4の検出値が明暗レベル閾値を越えるように変化してからコンライト反応時間だけ経過したと判断されたときに、車速センサ3の検出値を用いて自車両の現在位置を補正する。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】ナビゲーション装置の技術において、容易かつ高精度に距離係数を補正すること。
【解決手段】道路設定手段20が、距離係数の補正に用いる道路である特定道路ごとに、開始地点と終了地点の位置座標並びに両地点間の本来の道路長について情報設定を受け付け、その情報を、記憶手段30の高精度距離情報データベース35に記憶させる。走行中には、判断手段45が特定道路の各端点すなわち開始地点及び終了地点について、自車位置到達を判断し、それに基づいて距離算出手段25が、特定道路の前記開始地点と前記終了地点の間について、前記距離係数に基づく走行長を算出する。補正手段40が、高精度距離情報データベース35に記憶されている前記道路長と、距離算出手段25で算出した前記走行長と、に基づいて、距離係数を補正する。
(もっと読む)
携帯通信端末とその地磁気センサの誤差補正方法
【課題】地磁気センサにより検出される方位の情報を、ユーザが極力正しく把握することができる携帯通信端末、地磁気センサの誤差補正方法を提供する。
【解決手段】制御部160は、方位の情報を表示部155に表示させているときに、地磁気検出値の異常が所定時間以上持続したと判定した後、地図の表示をヘディングアップ表示からノースアップ表示に固定し、オフセット誤差補正処理を行う。オフセット誤差補正処理を行っている間は、ノースアップ表示を持続する。そして、この補正後の地磁気検出値に基づいて方位が算出されたときに、ノースアップ表示を解除して、ヘディングアップ表示を再開させる。
(もっと読む)
携帯通信端末とその地磁気センサの誤差補正方法
【課題】地磁気センサにより検出される方位の情報を、ユーザが極力正しく把握することができる携帯通信端末、地磁気センサの誤差補正方法を提供する。
【解決手段】制御部160は、地磁気検出値の異常が所定時間以上持続したと判定した後、方位の補正を行っている間、表示部155に表示される方位の情報の精度が低いことを表示部155に表示させる。制御部160は、例えば、方位を表すコンパスの画像を左右に振らせたり、コンパスの形、色、サイズ等を変化させたり、方位の精度低下を表す別の画像を表示させるなどの方法により、方位の精度低下の情報を表示部155に表示させる。
(もっと読む)
区分的線形補間を用いる距離計算方法
【課題】線形補間により第1の点と第2の点との距離を計算する。
【解決手段】第1の点及び第2の点は第1緯度と第2緯度の間にある。第1の点と第2の点との間にある点についての補間された卯酉線曲率半径値が、第1緯度につ
いての第1卯酉線曲率半径値及び第2緯度についての第2卯酉線曲率半径値に基づいて、計算される。第1の点と第2の点との間にある点についての補間された子午線曲率半径値が、第1緯度についての第1子午線曲率半径値及び第2緯度についての第2子午線曲率半径値に基づいて、計算される。第1の点と第2の点との間にある点についての補間された余弦値が、第1緯度の余弦を表わす値及び第2緯度の余弦を表わす値に基づいて、計算さ
れる。次に、第1の点と第2の点との距離が、補間された卯酉線曲率半径値、補間された子午線曲率半径値、及び補間された余弦値に基づいて計算される。
(もっと読む)
ナビゲーション装置
【課題】車両の位置を正確に算出できるナビゲーション装置を提供する。
【解決手段】CPU101は、車両10が駐車場入口に進入したと判断した後、算出した車両10の走行軌跡から、車両10が同一平面内を走行していると仮定したときに車両10が同じ場所を周回しているか否かを判断する。車両10が同じ場所を周回していると判断されると、CPU101は、算出した走行軌跡に基づいて、車両10が周回する走行軌跡(旋回軌跡)の形状を特定する。CPU101は、車両10が周回(旋回)を開始した地点(旋回開始地点)からの車両10の走行距離(旋回走行距離)を用いて、旋回開始地点から車両10が旋回軌跡上のどの地点に位置するのかを算出する。CPU101は、旋回軌跡上の車両10の位置を算出すると、算出した位置における旋回軌跡の接線方向を車両10の進行方向として算出する。
(もっと読む)
道路勾配測定装置、道路勾配測定方法及びコンピュータプログラム
【課題】車重等を検出するための高額なセンサを必要とすることなく、地図情報中に勾配に関する情報が含まれていない道路に対しても、正確な勾配を測定することが可能な道路勾配測定装置、道路勾配測定方法及びコンピュータプログラムを提供する。
【解決手段】勾配が予め測定されている参照用道路を車両が走行した走行履歴から、車重Mや転がり抵抗係数μr等の車両に関する各種車両パラメータを算出し(S3)、算出された各種車両パラメータと非参照用道路を走行した走行履歴に基づいて非参照用道路の勾配を算出する(S6)ように構成する。
(もっと読む)
21 - 40 / 75
[ Back to top ]