
Fターム[5H180DD02]の内容
交通制御システム (133,182) | 交通量の検出、処理、表示 (1,633) | 交通量及びその変動の検出 (1,256) | 方向別、車線別に検出するもの (318)
Fターム[5H180DD02]に分類される特許
141 - 160 / 318
車両認識装置及び車両認識方法
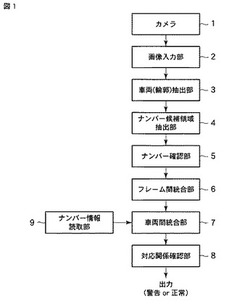
【課題】様々なタイプの移動車両を精度よく認識する技術を提供すること。
【解決手段】車両認識装置は、複数車両の無線通信器と交信し設定識別情報を読み取る第1の読取手段と、車両通行エリアを連続撮影する撮影手段と、連続撮影により取得された複数フレームの各々から複数の車両候補領域を抽出する第1の抽出手段と、複数の車両候補領域の各々から識別情報候補領域を抽出する第2の抽出手段と、識別情報候補領域中の表示識別情報の少なくとも一部を読み取る第2の読取手段と、複数フレームの各々に含まれる複数の車両候補領域の移動を追跡し、車両通行エリア内に進入している各車両を特定するとともに、各車両に対応する少なくとも一部の表示識別情報の読取結果を統合し、各車両に対応する表示識別情報を認識する情報処理手段と、設定識別情報及び表示識別情報を対応付けて各車両を認識する車両認識手段とを備える。
(もっと読む)
交通情報作成方法、交通情報作成装置及びナビゲーションシステム

【課題】信号等の渋滞以外の要因による速度低下を除去して精度のよい交通情報を作成する交通情報作成方法、交通情報作成装置及びナビゲーションシステムを提供すること。
【解決手段】所定距離毎又は所定時間毎に車速を検出し、規定車速以上の前記車速が所定距離以上連続して検出された場合に、車速に対応した渋滞度情報をリンク毎に作成する交通情報作成方法であって、リンク長が所定範囲内の場合、連結渋滞判定手段32が、始端起点距離以内で最も速い車速に対応した渋滞度情報を当該リンクに割り当てる、ことを特徴とする。
(もっと読む)
情報提供装置及び情報提供方法
【課題】交差点で安全に停止又は通過させるための情報を提供することができる情報提供装置及び情報提供方法を提供する。
【解決手段】情報提供装置10は、車両感知器30で検出した車両20の情報を取得し、取得した車両20の情報に基づいて、すべての車両20が危険走行状態(危険走行領域)を回避することができる青信号の延長時間又は短縮時間を算出し、算出した延長時間又は短縮時間に関する情報(青信号時間の変動量)を各車両20へ送信する。また、情報提供装置10は、青信号時間の延長又は短縮の指示を信号制御装置へ通知する。車両20の運転者は、提供された情報に基づいて、緩やかに減速して車両20を交差点で停止させ、又は、緩やかに加速して交差点を通過させる。
(もっと読む)
情報提供装置及び情報提供方法
【課題】交差点で安全に停止又は通過させるための情報を提供することができる情報提供装置及び情報提供方法を提供する。
【解決手段】車両感知器30は、通過地点Rを通過した車両の通過情報を情報提供装置10へ出力する。情報提供装置10は、通信機能を備える特定車両が送信したその特定車両の速度、位置などの情報を受信する。情報提供装置10は、受信した特定車両の速度、位置、及び取得した通過情報に基づいて、道路の所定の範囲に存在する一般車両の位置及び速度を推定する。情報提供装置10は、すべての車両20が危険走行状態(危険走行領域)を回避することができる青信号の延長時間又は短縮時間を算出し、算出した延長時間又は短縮時間に関する情報(青信号時間の変動量)を各車両20へ送信する。また、情報提供装置10は、青信号時間の延長又は短縮の指示を信号制御装置へ通知する。
(もっと読む)
情報提供装置及び情報提供方法
【課題】交差点で安全に停止又は通過させるための情報を提供することができる情報提供装置及び情報提供方法を提供する。
【解決手段】情報提供装置10は、通信地点Rを通過する車両20の情報(例えば、速度、車種など)を取得し、取得した車両20の情報、交差点に設置された信号機の信号情報、所定の標準減速度などに基づいて、車両20が交差点の手前に停止するための停止条件及び交差点に進入するための進入条件により決定される走行状態(危険走行領域)にあるか否かを判定する。情報提供装置10は、判定結果に応じた情報を車両に送信する。これにより、車両20の運転者は、提供された情報に基づいて運転操作することにより安全に交差点で停止又は交差点を通過できる。
(もっと読む)
走行状態判定装置
【課題】車線変更の終了を高精度に判定する走行状態判定装置を提供することを課題とする。
【解決手段】車両の車線変更を判定する走行状態判定装置であって、車線変更の開始検出後、車両の方位角と走行路の方位角との差の変化量が閾値以下の場合(つまり、車両の方位角と走行路の方位角との差が略一定になった場合)に車線変更が終了したと判定することを特徴とし、センサによる方位角の検出誤差によって車線変更終了後に車両の方位角と走行路の方位角との差が0にならない場合でも車線変更の終了を高精度に判定することができる。
(もっと読む)
交通情報収集装置及び交通情報収集提供システム
【課題】事故等の突発事象が生じても、交通情報のリアルタイム性を確保する。
【解決手段】交通情報収集装置20において、データ受信部21は車両Cから走行履歴情報を含むプローブ計測情報を受信する。交通情報集計処理部24は、最新の所定台数の車両のプローブ計測情報と、当該最新のプローブ計測情報より前に取得したプローブ計測情報を比較することにより車両の走行履歴に急激な変化が起こったか否かを判別する。さらに交通情報集計処理部24は、車両の走行履歴に急激な変化が生じたと判別した場合、最新のプローブ計測情報を集計処理し、交通情報を生成する。交通情報送信部25は、交通情報を交通情報提供システムや経路計算システムなど外部の機器へ送信する。
(もっと読む)
経路探索システム、データ処理装置、データ配信装置、ナビゲーション装置
【課題】車両が通行しやすい経路を探索する。
【解決手段】プローブカー1〜3に搭載されたプローブ情報送信装置4〜6から、各プローブカーの走行状態に関するプローブ情報を送信する。データ処理センターは、このプローブ情報を収集し、収集したプローブ情報に基づいて、各道路におけるプローブカーの通行台数を表すカウント値を算出する。こうして算出されたカウント値に基づいて、データ配信センターまたはナビゲーション装置10により、車両が進むべき経路を探索する。
(もっと読む)
路車間通信システム、光ビーコン、車載機、及び車両
【課題】 ドライバに対する安全運転支援を精度よく行うことができる路車間通信システムを提供する。
【解決手段】 本発明の路車間通信システムは、通信領域を道路Rの所定範囲に設定する投受光器8を有する光ビーコンと、車両に搭載されるとともに、前記通信領域において投受光器8との間でアップリンク情報及びダウンリンク情報の送受信を行う車載機と、を備えている。投受光器8は、前記アップリンク情報を受光する受光面14aを有する受光部12を備えている。この受光部12は、受光面14aを道路R上に投影するようにアップリンク領域UAを設定するとともに、受光面14aにおける前記アップリンク情報を受光した受光位置に関する受光位置情報を出力する。光ビーコン4は、受光部12が出力する前記受光位置情報に基づいて、アップリンク領域UAにおいて前記車載機が前記アップリンク情報を送信した送信位置を示す車載機位置情報を生成し、この車載機位置情報を含んだ前記ダウンリンク情報を投受光器8に送信させる制御部を備えている。
(もっと読む)
情報提供判定装置及び車載装置
【課題】従来の情報提供判定装置では、例えば、渋滞時など車両のドライバが既に見えている移動体や、ドライバが認識している危険に関して、同じ警告情報を何度も提供する結果となってしまい、逆にドライバの負担を増加させる要因となっていた。
【解決手段】交差点に進入する第1移動体群の挙動情報と、交差点の信号情報等と、タイミングを規定する配信制御情報と、時刻情報とに基づいて、警告情報に、警告情報種別と警告情報レベル等を付加した第1移動体群に関する注意喚起情報を生成し、交差点に進入する第2移動体群に第1移動体群に関する注意喚起情報を送信するか否かを判定する情報出力判定手段、情報出力判定手段の判定結果に応じて、少なくとも交差点付近の一部を覆う通信エリアを有し、当該通信エリアに進入する第2移動体群と通信する通信手段に警告を出力する情報出力手段を備えた情報提供判定装置である。
(もっと読む)
運転支援画像表示システム及び車載装置
【課題】対向右折車両によって死角となる車両の動向を右折車両の運転者に対して可視化して提示することで、右折時の運転支援を行う技術を提供する。
【解決手段】運転支援画像表示システム1は、右折車両に対して交差点の状況に関する情報を送信する路側機10と、路側機から受信した情報に基づき運転支援画像を表示する車載装置20とを備える。路側機10は、対向右折車両及びこの対向右折車両によって死角となる暗対向車両とに関する所定の物理量と、交差点に関する所定の物理量を取得し、これらを右折車両対して送信する。右折車両に搭載されている車載装置20は、路側機10から送信された情報を受信し、これに基づいて右折車両の運転者の視界を模擬した視界による交差点の画像と対向右折車両の画像と暗対向車両の画像とを重畳し、かつ、対向右折車両の画像を透過することで暗対向車両を可視化した運転支援画像を描画して表示する。
(もっと読む)
運転支援装置、車載運転支援装置及び運転支援システム
【課題】運転者にとって最適なタイミングで情報提供する運転支援装置及び運転支援システムを低コストで提供する。
【解決手段】
運転支援システム1は、車載運転支援装置3と複数の路側運転支援装置2(200、201)とを備え、上流地点A1の路側運転支援装置201が車載運転支援装置3へ提供タイミングを送信し、車載運転支援装置3が、運転者に情報提供するタイミングとその情報を基に実際に運転者が運転行動を起こしたタイミングとを記録し、記録した提供タイミングと運転行動タイミングとを下流地点A2の路側運転支援装置200へ送信し、下流地点A2の路側運転支援装置200が受信した提供タイミング及び運転行動タイミングを上流地点A1の路側運転支援装置201へ送信することで、上流地点A1の路側運転支援装置201が適切な提供タイミングを学習することができる。
(もっと読む)
移動体情報装置および移動体情報プログラム
【課題】異なる道路を移動している移動体同士の衝突の誤判定を防止するとともに、衝突判定の処理負荷を低減する移動体情報装置および移動体情報プログラムを提供する。
【解決手段】自車200の走行方向前方の所定距離以内に交差点216が存在し自車200が交差点216を通過する場合、道路210を識別するインフラリンクIDおよび自車200の第1移動情報を送信するとともに、他車202、204から道路212、214のインフラリンクIDおよび第2移動情報を受信する。地図データと道路210、212、214のインフラリンクIDと第1移動情報と第2移動情報とから、道路210と道路212とは交差点を形成していないと判断し、自車200と他車202との衝突判定は行わない。道路210と道路214とは交差点216を形成しているので、自車200と他車204との衝突判定を実施する。衝突する場合には、適切な回避処理を実施する。
(もっと読む)
運転支援システム
【課題】車両の位置を検出する位置検出手段を要さずに、右折車と対向直進車との衝突の危険性を判断して警告する。
【解決手段】運転支援システム1は、路側装置2と、車両側装置3とを備え、路側装置2は、車両側装置3と通信して右折車固有情報を受信し、路側の右折車撮像用カメラ5などから車両固有情報を取得し、対向直進車の危険性を判定する。前記通信による右折車固有情報と、カメラ5による車両固有情報とが一致し、且つ対向直進車危険性有りと判定したときに、危険報知指令を右折車に送信する。車両側装置3では、該危険報知指令を受けたときには、前記路側で一致した車両固有情報と自車の車両固有情報とが一致し且つ自車が右折方向指示状態であることを条件にドライバーに危険性有りを報知する。
(もっと読む)
交通信号制御装置、及び流出交通流予測方法
【課題】自律分散型交通信号制御システムにおいて、流出方向に交錯する他の交通の交通量を考慮することで、精度の高い流出交通流予測を実現すること。
【解決手段】
各流入路から進行方向別の流出台数を算出する際に、進行方向の交錯交通の交通量に応じて、当該進行方向への流出台数を補正する。例えば、流入路Cから右折方向(流入路Bの方向)に進行する場合、交錯交通である流入路Aからの対向直進車に応じて流出台数を補正する。すなわち、予測対象の時刻から過去所定時間における流入路Aの到着台数と滞留台数との合計台数が所定の閾値台数を超える場合、当該右折方向への流出台数を「0」と補正する。
(もっと読む)
経路探索方法および経路探索システム
【課題】
多数の車両から収集されたプローブデータに内包される走りやすさなどのノウハウを、出発地から目的地までの経路全体にわたって反映して経路探索を行う。
【解決手段】
センタ装置は、車載端末装置から受信したプローブデータから、主要分岐ノード検出部にて主要分岐ノードを検出する。プローブデータ分割部ではプローブデータを主要分岐ノードでプローブ切片に分割する。指示された出発地と目的地に基づき初期経路生成部が生成した初期経路を、経路分割部にて分割し、派生経路生成部では分割された経路をプローブ切片で置換した派生経路を生成する。経路選択部は派生経路を得点付けして選択することで、プローブデータに内包される走りやすさなどのノウハウを反映した推奨経路の提供を図る。
(もっと読む)
移動体の無線通信システム
【課題】移動体の異状行動情報、移動体の各所定場所での通過日時・通過場所・スピード計測値等の各種の通過情報をリアルタイムで把握できるようにする。
【解決手段】移動体の走行関連場所の複数の固定位置に設置し、互いに双方向での送受信を可能とした固定側通信端末器1と、移動体Rが所持する移動側通信端末器2とを備え、移動体Rが任意の固定側通信端末器1に近接して無線通信ネットワークPを介してのデータ転送可能となる位置で両通信端末器1,2間の双方向での送受信を可能にする。また、各固定側通信端末器1を統括して管理・制御する情報センター3を含み、該情報センター3は、移動側通信端末器2から固定側通信端末器1に受信した移動体RのID情報や通過日時・通過場所・スピード計測値の通過情報をインターネット・無線通信ネットワーク・光ファイバー通信網Pのいずれかを介して入手可能にする。
(もっと読む)
ループコイル式車両検知装置
【課題】 ループコイル式車両検知装置で温度変動や環境ノイズに頑強で感度良好な方式を提供する。
【解決手段】 本発明のループコイル式車両検知装置は、ループコイルと、ループコイルに正弦波電圧を印加する手段と、ループコイルに流れる電流を直列に接続した抵抗で検出し、ループコイル駆動周波数で同期検波し、ループコイルインピーダンスを演算で求めて車両を検知することを特徴とする。同時に同期検波の参照信号を調整して位相変化が0度からとなることで車両検知時の感度を改善したことを特徴とする。
(もっと読む)
歩行者横断支援装置、車載装置、タグ装置
【課題】歩行者の個人差を考慮した横断支援を実現する歩行者案内システム、車載装置及びタグ装置を提供すること。
【解決手段】歩行者19が携帯する通信装置14から歩行者19の識別情報46を取得する歩行者情報取得手段22と、歩行者19の識別情報に対応づけて歩行速度Vwが記憶された歩行者情報記憶手段35と、歩行者の横断箇所に接近する車両の位置情報Lc、Vcを検出する位置情報検出手段16と、歩行者19の識別情報に基づき抽出された歩行速度Vw及び横断箇所の幅員Lw、並びに、位置情報Lc,Vcから、歩行者19と車両17が接触するか否かを判定する判定手段32aと、判定手段32aにより歩行者19と車両17が接触すると判定された場合、歩行者19に警告する警告制御手段32bと、を有することを特徴とする歩行者横断支援装置99を提供する。
(もっと読む)
交通状況判定システム
【課題】渋滞状況の正確な判定を可能としつつも、車両と情報センタとの間の通信に係る通信回数や通信データ量を減らすことができ、通信処理負担の軽減や通信料金の低価格化を可能とした交通状況判定システムを提供する。
【解決手段】車両4側において渋滞度が渋滞又は混雑と演算された道路を走行する場合に、GPS41により特定された車両4の走行軌跡に関する情報をプローブセンタ2に対して送信し、一方、プローブセンタ2側においては携帯電話機6を介して携帯電話通信網5より車両4の走行軌跡を取得し、GPS41により特定された車両4の走行軌跡に対応する道路の渋滞状況を渋滞と判定し、携帯電話通信網5により特定された車両4の走行軌跡に対応する道路の渋滞状況を渋滞無しと判定するように構成する。
(もっと読む)
141 - 160 / 318
[ Back to top ]