
Fターム[5H180FF04]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 車載の位置センサを持つもの (4,762)
Fターム[5H180FF04]に分類される特許
2,121 - 2,140 / 4,762
船舶運航管理システム
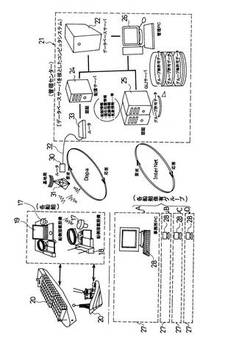
【課題】所属している船舶保有グループの船舶だけでなく、他のグループの船舶の位置、移動方向を予測でき、同時に各船舶保有グループごとの独自情報も付加することができて、各保有グループごとの船舶の運航管理を可能とする。
【解決手段】各船舶には、GPS測位装置等と、パソコンおよび海図データと、データ通信端末を配置して、各船舶のパソコンと管理センターのコンピュータシステムとを相互にデータ通信可能に連絡すると共に、各船舶からは位置のデータ、時刻のデータ、方向のデータを管理センターのコンピュータシステムに送信する。管理センターには、海図データを備えたコンピュータシステムを配置し、各船舶保有グループには、それぞれパソコンおよび海図データとネットワーク機器を配置し、当該保有グループに所属する各船舶の位置のデータ、時刻のデータ、方向のデータを管理センターのコンピュータシステムから受信可能な船舶運航管理システム。
(もっと読む)
位置表示装置

【課題】自分の位置と相手の位置を同一の地図上に表示する際に使いやすい位置表示装置を提供する。
【解決手段】自分の位置情報だけでなく相手の位置情報に基づいても地図の方向を決定できるようにし、相手の視点から見た地図を表示することができるようにする。位置情報から地図の向きが決められないときは北方を上にする。自分と相手のいずれの位置情報により地図の向きを決めるか任意に選択できる。また、相手に送る写真を撮影するときは自動的に相手の位置情報に基づいて地図の方向を決め、この地図の進行方向に合わせて写真を撮れば相手の視点から見た風景が撮影できるようにする。
(もっと読む)
制御用情報記憶装置及びプログラム
【課題】車両走行時に車両から得られる情報であって、車両の走行制御のために用いられる制御用情報を記憶する場合に、記憶量を低減させながら有用な情報記憶を維持させる。
【解決手段】一つ手前のセグメントIDがあれば(S20:YES)、S30へ移行し、一つ手前のセグメントでの車速データを確認する。走行中セグメントとの接続部分において車速データの変化があるか否か判断し、車速データの変化がなければ(S40:NO)、一つ手前のセグメントでの車速データを直進のデータとして保存する(S50)。 一方、車速データの変化があれば(S40:YES)、走行中セグメントとの接続部分において「車速>0」且つ「方位変化がある」か否か判断する(S60)。この条件が成立しない場合は(S60:NO)、停止のデータとして保存し(S70)、条件が成立する場合は(S60:YES)、右左折のデータとして保存する(S80)。
(もっと読む)
ナビゲーション装置、傾斜角を用いた角速度補正装置および方法
【課題】車両の傾きが存在する環境でも、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができ、自律航法精度を向上させることができる「ナビゲーション装置、傾斜角を用いた角速度補正装置および方法」を提供する。
【解決手段】加速度傾斜角θaccおよびGPS傾斜角θgpsからセンサ傾斜角θsensorと車両傾斜角θcarとを算出し、この2つの傾斜角θsensor,θcarに基づいて角速度ωgyroを補正することにより、車両が傾いているときでも、角速度センサ4の感度補正と同時に加速度センサ1のゼロ点補正を行うことができるようにする。また、このように同じ演算の中で角速度センサ4の感度補正と加速度センサ1のゼロ点補正とを行うことにより、簡単なアルゴリズムで感度補正とゼロ点補正を行うことができるようにする。
(もっと読む)
表示装置
【課題】地図などの画像の表示を、使用者の意思通りに柔軟にかつ容易に操作することのできる表示装置を提供すること。
【解決手段】画像を表示する画面9bと、画面9bに対する接触を検出し、画像に対する操作を行う操作手段と、接触状態での接触点の移動方向に合わせて、画像をスクロール表示させる表示制御手段とを装備する。
(もっと読む)
ナビゲーション装置
【課題】ナビゲーション装置において、運転者の要求により合致した再案内を行う。
【解決手段】音声案内をした後、再案内要求が一回目の場合には、聞き逃した可能性があるため、初期案内と同一内容の案内(距離のみ変更、以下同じ)を行う。
一方、2回目以降の再案内要求からは、別の情報を希望している可能性があるので、付属案内項目の構成を変更して案内を行う。この場合、基本案内項目は同一内容である。
付属案内項目の変更は、構成を代えることによる変更(第1実施例)と、項目の追加による変更(第2実施例)とがある。
(もっと読む)
測位システム、自律測位装置及びマーカ管理装置
【課題】測位対象から最も近くに設置されている測位対象検知器の位置を示す情報を受信して、確実かつ正確に測位対象の位置を補正することができるようにする。
【解決手段】自律測位装置2が測位対象1の位置を測位すると、測位対象1の位置を示す位置情報をマーカ管理装置7に送信し、マーカ管理装置7が自律測位装置2から送信された位置情報を参照して、屋内環境下に設置されている複数のRFIDリーダ4の中で、測位対象1から最も近くに設置されているRFIDリーダ4を特定し、そのRFIDリーダ4の検知感度を高める。
(もっと読む)
運転者状態判定装置、及び運転支援装置
【課題】より精度の高い運転者の状態判定を行うこと。
【解決手段】走行中における運転操作情報(アクセル・ブレーキの操作量、車速、車間距離など)を測定し、これらの測定結果に基づいて運転者の運転操作タイプ(攻撃型・速度確保型・追従型・慎重型)を判定する。運転操作タイプの判定は、予め定義されている判定条件に基づいて行われる。そして、判定された運転操作タイプに基づいて、運転者の状態を判定するための判定基準となる判定閾値を特定する。また、車両の走行中における運転者の生体情報(心拍、発汗量、筋電位など)を測定し、この生体情報の測定結果を、設定された判定閾値と照らし合わせることによって運転者の状態を判定する。そして、判定された運転者の状態に対応する運転支援モードを特定し、この特定された運転支援モードに基づいて、フィードバック装置による適切な運転支援を行う。
(もっと読む)
ナビゲーション装置およびその機能活性化方法
【課題】 利用者が利用設定を行っていない機能の効果を実感でき、さらには機能を利用するにあたって必要な設定操作を知らずとも機能を利用できるナビゲーション装置を提供する。
【解決手段】
本発明のナビゲーション装置は、車両等の走行状況を示す情報を取得し、それに応じて適切な機能を一時的に活性化する手段を備える。
また、活性化した機能を継続利用するかどうかの判断を利用者に求め、継続利用する場合には該機能を使用することを確定させ、機能の詳細な設定を適切に設定する手段を備える。
(もっと読む)
渋滞案内装置
【課題】運転者にとってより適切な渋滞を通知する。
【解決手段】ナビゲーション装置は、ビーコンや情報センタ等から、車両周辺、又は走行経路上に発生している状態について、渋滞の位置と距離を含む渋滞情報を取得する。そして、車両の走行目的や、現在位置から目的地までの距離(以下予定走行距離という)に応じて所定の閾値(以下閾値距離という)を決定し、渋滞情報から得られる渋滞の距離(以下渋滞距離という)が閾値距離以上である渋滞について運転者に案内する。例えば、第1実施例の場合、走行目的が通勤、通学であれば、300m以上の渋滞を案内し、レジャー等の場合には3km以上の渋滞を案内する。一方、第2実施例の場合、例えば、予定走行距離が10km未満の場合には渋滞距離300m以上の渋滞を案内し、予定走行距離が100km以上の場合には渋滞距離3km以上の渋滞を案内する。
(もっと読む)
交差点通過支援装置および交差点通過支援方法
【課題】確認位置の判定精度を向上させる。
【解決手段】走行履歴記録部50には、検出された車速と、特定された車両位置とが対応づけて記録されており、この走行履歴記録部50に記録された情報に基づいて、交差点への進入時にドライバが周囲確認すべき確認位置が判定される。そして、検出された車速と特定された車両位置とを処理対象として、舵角検出部40によって検出された操舵角に基づいて、確認位置を判定するためのデータとしての有効性が判定される。
(もっと読む)
位置検出装置および位置検出方法
【目的】本発明は精度の高い位置検出を可能にする「位置検出装置および位置検出方法」を提供することである。
【構成】自律航法部12は、自律航法用センサーの水平面に対するピッチ角θ、ヨー角Yおよび車両に対するセンサー取り付けピッチ角A、センサー取り付けヨー角A2並びに車速センサーより求まる移動距離を用いて車両位置を計算すると共に、加速度信号を用いて車両速度を計算する。第1の補正部21は車速センサーの出力信号を用いて第1の周期で車両速度を計算し、該車両速度と自律航法部で計算した車両速度との速度差に基づいてピッチ角θ、センサー取り付けピッチ角A、センサー取り付けヨー角A2を補正する。また、第2の補正部22は、GPSレシーバが出力する車両位置、車両速度および自律航法部が出力する車両位置、車両速度を用いて、第1の周期より長い第2の周期(GPS周期)でピッチ角θ、センサー取り付けピッチ角A、ヨー角Y、センサー取り付けヨー角A2を補正する。
(もっと読む)
ナビゲーション装置およびフリーウェイ検索方法
【課題】フリーウェイの名称を正確に知っていなくても、簡単にフリーウェイの検索ができる「ナビゲーション装置およびフリーウェイ検索方法」を提供する。
【解決手段】フリーウェイの道路種ごとのアイコンを画面表示するアイコン表示部31と、画面表示されたアイコンの中からユーザ操作により選択されたアイコンに対応する道路種のフリーウェイ名称を検索キーとして設定する検索キー設定部32とを備え、紙地図や道路上の案内看板などで実際に使われているマークと同様のマークで構成したアイコンを画面表示し、ユーザに所望のアイコンを選択させることによってフリーウェイの検索キーを設定するようにすることにより、ユーザがフリーウェイ名称を正確に知っていなくても、現実世界と同様のマークで構成されたアイコンを頼りにフリーウェイ名称を検索キーとして設定することができるようにする。
(もっと読む)
通信システム、端末機及び車載機
【課題】本発明は、人の所持する端末機と車両に搭載された車載機との間の通信を適切な通信量にて行うことができる、通信システム、並びに端末機及び車載機の提供を目的とする。
【解決手段】人の所持する各端末機と車両に搭載された車載機10とを有し、各端末機と車載機10との間の通信システムであって、各端末機と車両の衝突危険度を算出し、衝突危険度の高いA群内の端末機のそれぞれは車載機10と直接通信し、衝突危険度の中程度のB群内の端末機はB群内の代表端末を介して車載機10と通信し、衝突危険度の低いC群内の端末機はC群内の代表端末を介して車載機10と通信する、通信システム。
(もっと読む)
車載用情報記憶装置及びそれを用いた車両走行制御装置
【課題】車両走行を制御するための車両走行制御情報をドライバーの運転の嗜好性が反映できる形式で記憶する車載用情報記憶装置を提供すること。
【解決手段】制御装置14は、エンジンECU20からエンジンONされていることを示すエンジン駆動信号を受信したら、センサ群30から出力される車両走行制御情報の記憶を開始する。その後、エンジン駆動信号がエンジンECU20から出力されなくなったときには、車両走行制御情報の記憶を終了する。制御装置14は、GPS受信装置11から出力される現在地信号と道路地図データ記憶装置12に格納されている道路地図データに基づいて、エンジンONからOFFされるまでに車両が走行した経路を決定し、決定した経路と関連付けて車両走行制御情報を記憶装置13に記憶する。
(もっと読む)
駐車場誘導システム
【課題】駐車場において、利用者が自己の選択に基づいてスムースに空きスペースに移動できるようにするような誘導システムを提供する。
【解決手段】ホストコンピュータ9が、カメラ8によって撮影された駐車場4の俯瞰の画像に基づいて、駐車場4中の空き駐車スペースの位置が視認できる画像を生成し、生成された画像を、狭域無線アンテナ6が通信エリア7に送出する。通信機能を有するカーナビゲーション装置10を搭載した車両1は通信エリア7において、当該送出された画像を受信し、カーナビゲーション装置10の表示装置に表示させる。
(もっと読む)
案内装置、案内方法、案内プログラムおよびコンピュータに読み取り可能な記録媒体
【課題】最適な移動方式による案内情報を出力し、安全かつ適切な移動を図ること。
【解決手段】取得部101は、移動体の起動時に、移動体が停止していた停止時間を取得する。算出部102は、移動体の起動時における現在地点を算出する。そして、生成部103は、取得部101によって取得された停止時間と、算出部102によって算出された現在地点とに応じて、移動体の利用者の移動に関する案内情報を生成し、出力部104は、生成部103によって生成された案内情報を出力する。
(もっと読む)
車載ナビゲーション装置
【課題】走行中の状況に応じて表示される地図の縮尺を自動的に変更することができ、かつ、中途目的地に近づいた際に周囲の状況との対応がわかるように拡大表示をすること。
【解決手段】既存の車載ナビゲーション装置に加え、車両の現在位置とルート上の次の中途目的地までの残距離を算出する距離算出部16、車両の走行速度を検知する車速検知部17、地図情報蓄積部13を参照して現在位置の道路種類を特定する道路種類判定部18、車速、残距離、道路種類と表示画面2に表示する地図の縮尺との対応関係をそれぞれ記憶する縮尺設定DB19を備えている。縮尺変更部20は、車速、残距離、道路種類から選択されたパラメータの値に対応させた縮尺を縮尺設定DB19から読み出し、画面表示部15は、該当する縮尺の地図情報を地図情報DB13から読み出して表示画面2に表示させる。
(もっと読む)
歩行者情報提供装置、歩行者情報提供システム、及び歩行者情報提供方法
【課題】歩行者の存在確率が高い地域に車輌が入ると車載機に対して歩行者情報を配信して運転者に注意喚起できるようにすること。
【解決手段】情報提供サーバ装置400において、近傍歩行者情報抽出部406は、入力された歩行者位置情報に基づいて交通エリア情報DB405から該当時間帯の地区の近傍歩行者モデル情報を抽出し、その近傍歩行者モデル情報を通信部404により該当時間帯に該当地区を走行中のカーナビ装置300に送信する。
(もっと読む)
ナビゲーション装置
【課題】より認識しやすい方面案内を行うことが可能なナビゲーション装置を提供する。
【解決手段】案内標識が設置されている交差点を右折する走行経路が設定されている場合、案内標識から所定距離手前、例えば100m手前において方面案内が実行される。この場合、規則に従って、地名「枚方」が読み出されるが、「枚方」は難読地名(読み:ひらかた)であり、同一方面に難読地名でない別の地名「八幡」が存在するので、「八幡」を用いて「まもなく、やわたほうめんです」と音声案内を行う。これにより、運転者に取ってより理解しやすい方面案内が実行される。
(もっと読む)
2,121 - 2,140 / 4,762
[ Back to top ]