
Fターム[5H180FF07]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置誤差の補正、他の位置情報の参照 (1,384)
Fターム[5H180FF07]に分類される特許
1,321 - 1,340 / 1,384
角速度センサの0点電位補正方法およびナビゲーション装置
【課題】 角速度センサの0点電位を補正する機会を格段に増やすことによって、0点電位の補正を十分に行うことができ、ひいては、ナビゲーションを高精度に行うことができる「角速度センサの0点電位補正方法およびナビゲーション装置」を提供すること。
【解決手段】 所定の区間における車両の実走行履歴と、当該所定の区間における道路形状とを比較し、実走行履歴が道路形状と一致しない場合には、角速度センサ11の0点電位の値を現在の値から変更することによって実走行履歴を道路形状と一致させる処理を行い、この処理によって変更された0点電位を、0点電位の基準値として設定することによって0点電位を補正すること。
(もっと読む)
位置測定システムおよびそれを備えた操船支援システム

【課題】 構成が簡素で、かつ、安価な位置測定システムおよびそれを備えた操船支援システムを提供する。
【解決手段】 GPS測定値の更新前後における変化量が跳躍判定量を超えると、制御部は、跳躍と判断する。そして、制御部は、その跳躍が発生した時点から1サンプル前と2サンプル前との距離差から移動速度を導出し、その移動速度を維持するものとして、跳躍発生時における現在位置を推定する。同時に、制御部は、跳躍発生時の現在位置を示す値とGPS測定値との差を第1の補正値とする。さらに、制御部は、跳躍発生以降のGPS測定値に対して、演算された第1の補正値を用いて補正を行い、現在位置を算出する。
その後、跳躍が再度生じた場合には、制御部は、第1の補正量を再度算出し、同様の補正を行う。
(もっと読む)
車両用ナビゲーション装置及び記憶媒体
【課題】 住所入力検索の操作性を向上させるとともに、所望の地点を的確に設定可能にする。
【解決手段】 電話番号入力モード及び階層的な住所データを備えたリストの中から選択して入力を行う住所入力モードを備え、各入力モードによる入力で地点設定し、案内を行う車両用ナビゲーション装置において、前記電話番号入力モードにより入力された電話番号の局番に対する住所データを検索し、該検索された住所データの階層からの住所入力モードに切り替えるようにしたものである。
(もっと読む)
車載ナビゲーション装置及び自車位置補正方法
【課題】GPS衛星からの信号の受信が困難な状況が継続する場合であっても自車位置を高精度に検出できるようにする。
【解決手段】自車が走行している走行路に破線のレーンマークが敷設されている場合に、この破線のレーンマークを含む画像を車載カメラで撮影し、車載カメラで撮影された画像の画像認識処理により、破線のレーンマークの破線間隔を測定するとともに、自車が通過した単位線の本数を計数する。そして、これら破線のレーンマークの破線間隔と通過単位線の本数とに基づいて自車の走行距離を算出し、算出した走行距離に基づいて自車位置を補正する。
(もっと読む)
カーナビゲーション装置のマップマッチング方法およびカーナビゲーション装置
【課題】 道路形状に特徴がない場合でも、表示装置の地図上の自車両の現在位置を実際の現在位置に補正することができる
【解決手段】 道路の形態が車両に上下方向の振動を発生させる地点(例えば踏み切り通過地点)を振動地点として地図データに記憶しておき、振動センサが車両の上下方向の振動を検出したとき、表示装置の地図上に表示された自車位置を、地図データに記憶された振動地点に補正する。このため、道路形状に特徴がない場合でも、表示装置の地図上の自車両の現在位置を実際の現在位置に補正することができる。
(もっと読む)
車両の逸脱判定装置
【課題】 自車両と対向車両の接触の可能性がある場合に適切な接触回避動作を行う。
【解決手段】 逸脱判定部65は、自車両と対向車両とが適正にすれ違うことができる適正進路を、自車両が逸脱したか否か、あるいは、対向車両が逸脱したか否かを、自車両および対向車両の各進行軌跡に基づいて判定する。接触予測部69は、逸脱判定部65による判定結果、自車両と対向車両との相対距離や相対速度、自車両および対向車両の各進行軌跡等に基づき、自車両と対向車両との接触が発生する可能性を予測する。作動部70は、接触予測部69による予測結果に応じて、例えば接触の可能性が有ると判定された場合には、音声等の聴覚的警報や表示等の視覚的警報やステアリング振動等の触覚的警報を警報装置16から出力させたり、EPSアクチュエータ19により反力トルクまたはアシストトルクを出力させる接触回避制御を実行する。
(もっと読む)
車両用ナビゲーションシステム
【課題】交差点における通過予測を的確に判定して、次の誘導案内を行うナビゲーションシステムを提供する。
【解決手段】推奨経路に従って走行している車両が、案内対象交差点から所定の距離内に進入した場合に、車両がその交差点から退出するための推奨経路としての推奨退出道路に対する車両の前後方向の角度である車両角度を判定する車両角度判定手段と、車両の推奨退出道路に対する車両角度が所定の角度内である場合に、車両が案内対象交差点を通過したと判断し、案内対象交差点以後の案内を開始可能な状態とする経路案内手段とを含むナビゲーションシステムである。所定の角度は、推奨退出道路と、推奨退出道路に隣接する案内対象交差点から退出可能な退出可能道路または車両が案内対象交差点に進入した進入道路との間の所定の比率の角度によって決定する。
(もっと読む)
走行経路生成装置
【課題】 経路に段差が生じた場合でも、スムーズで違和感のない操舵を実現できる走行経路生成装置を提供する。
【解決手段】 自車両前方の経路を取得する走行経路取得手段(経路データベースユニット15)と、走行経路に対する自車両の位置を検出する車両位置検出手段(GPS14)と、取得した走行経路を追従するために必要となる操舵量を算出する経路追従操舵量算出手段(追従操舵コントローラ16)と、を有する自動操舵車両において、走行経路取得手段によって取得した経路の段差を検出する経路段差検出手段と、この経路段差検出手段によって検出した走行急変化を車両の走行状態に応じて補正する走行経路補正手段と、を備える。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 電源投入後や長時間無測位状態からの測位開始時に、精度の高い初期位置を得ることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置は、測位開始時に、差分距離Lを算出するステップと、少なくとも差分距離Lが閾値より小さいか否かを判定するステップと、閾値よりも小さいと判定されたとき、測位データから算出された位置を初期基準点位置と決定し、閾値以上であると判定されたとき、前回測位時の基準点位置に今回測位時の速度ベクトルを加算した値を暫定的な基準点位置と決定するステップとを有する。
(もっと読む)
ナビゲーション装置及び地図データ更新方法
【課題】 地図データに格納されていない道路を車両が走行した際に、その道路のみを高い確率で地図データに追加することができるナビゲーション装置及び地図データ更新方法を提供する。
【解決手段】 ナビ装置1は、制御部2を備え、制御部2は、描画データ記憶部11に格納された描画データの読出及び書込を行う。また、車両の位置を検知するGPS受信部4、車速センサ7、方位センサ8から、インターフェース3を介してデータを受信し、自車位置を算出する。さらに、描画データと自車位置とに基づいて、自車位置を描画データの道路上に位置決めするためのマップマッチング処理を行い、マップマッチングを行うことができない場合に、描画データに基づいて、車両の走行軌跡を中心とした所定領域内において道路の有無を判断する。そして、所定領域内に道路がない場合に、車両の走行軌跡に基づいた道路のデータを描画データに格納する。
(もっと読む)
前方道路情報送出システム
【課題】 システムが実際に走行制御や警報動作を行わせる実働領域を広げる。
【解決手段】 前方道路情報送出システム1は、自車両の進行方向に分岐点や交差点が存在し、それら分岐点や交差点から先の複数の進行候補道路に対応して複数の前方道路情報を作成した場合であっても、それら作成された複数の前方道路情報が類似しているか否かを判定し、類似している旨を検出すると、複数の前方道路情報のいずれかを走行制御装置8〜11や警報装置12へ送出して走行制御動作や警報動作を行わせる。分岐点や交差点の付近から先の道路に対する走行制御動作や警報動作を行わせることができ、システムが実際に走行制御動作や警報動作を行わせる実働領域を広げることができる。
(もっと読む)
移動体の位置算出装置および算出方法
【課題】 本発明は、移動体の走行状態に応じて精度良く移動体の位置の算出をすることができる「移動体の位置算出装置および算出方法」を提供する。
【解決手段】 GPS受信装置1は、測位衛星からの受信電波を受信するRF受信部12と、受信された信号から移動体の速度および角速度データを測位する測位演算部14と、速度と角速度の関係を規定する角度予測関数に基づき角速度の予測範囲を設定する予測範囲設定部16と、測位された角速度データが予測範囲内にあるか否かを判定し、角速度データが予測範囲外の場合には、角速度データが予測範囲内となるように角速度データを補正する測位データ補正部20と、移動体の走行状態を判定し、当該判定結果に応じて予測範囲設定部16による角度予測関数の選択を制御する予測範囲可変部18とを含んで構成される。
(もっと読む)
測位装置、測位システム、測位方法および測位プログラム
【課題】 記憶容量の増大を抑制しつつ、地球中心を1個のGPS衛星と見立てて測位計算を精度よく行えるようにする。
【解決手段】 動端末107a、107bからGPSサーバ102への接続が確立すると、移動端末107a、107bが接続したアクセスポイントの情報を専用プロトコルによって送信パケットに付加し、GPSサーバ102に伝達し、GPSサーバ102は、移動端末107a、107bが接続したアクセスポイントの情報に基づいて高度テーブル103aを検索することにより、現在の移動端末107a、107bの位置に対応した高度情報を取得し、移動端末107a、107bに送信し、測位手段108a、108bは、現在の移動端末107a、107bの位置に対応した高度情報を取得すると、地球中心を衛星と見立てて測位計算を行う。
(もっと読む)
携帯装置で使用するためのパーソナルナビゲーション装置
ユーザによって使用されるナビゲーションシステムは、ナビゲーションユニットと携帯装置とを含む。ナビゲーションユニットは、ナビゲーション関連出力を生成する。ナビゲーションユニットは、無線通信リンクを介して携帯装置にナビゲーション関連出力を送信する。携帯装置は、ナビゲーション関連出力を受信し、それによって実施される処理のためにナビゲーション関連出力の少なくとも一部を使用する。一実施形態では、携帯装置は、携帯装置のユーザからユーザ入力を受信するための入力インターフェースを含む。このような一実施形態では、携帯装置は、無線通信リンクを介してナビゲーションユニットにナビゲーション関連入力を送信し、ナビゲーションユニットは、ナビゲーション関連出力を生成するため、ナビゲーション関連入力の少なくとも一部を使用する。 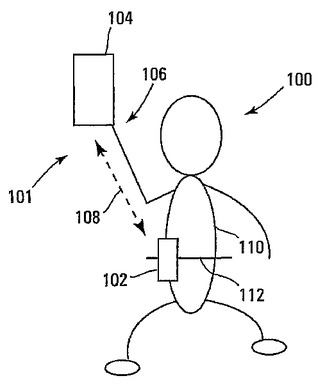 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 測位精度および測位率の大幅な低下を防止することができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、仰角マスク値よりも大きな仰角に対応する位置に配置された複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、GPS受信機2で電波を受信したGPS衛星の数を検出する履歴保管部12と、検出されたGPS衛星の数に基づいて仰角マスク値を可変に設定する仰角マスク設定部14と、GPS受信機2から出力される測位位置に基づいて現在位置を計算する車両位置計算部20とを備えている。
(もっと読む)
ナビゲーション装置
【課題】 誤差範囲の設定精度を高めることができる「ナビゲーション装置」を提供すること。
【解決手段】 ナビゲーション装置は、複数のGPS衛星から送信される電波を受信して測位位置を出力するGPS受信機2と、測位位置の計算に使用された複数のGPS衛星のそれぞれの仰角値の検出と、複数のGPS衛星の重心位置の検出を行うとともに、検出した仰角と重心位置とに基づいて測位位置の誤差範囲を設定する誤差円半径計算部14と、GPS受信機2から出力された測位位置と誤差円半径計算部14によって設定された誤差範囲とを用いて現在位置の計算を行う車両位置計算部20とを備えている。
(もっと読む)
ナビゲーション装置及びマップマッチング方法
【目的】 正しく下りあるいは上り道路リンクを走行中であると判定する「ナビゲーション装置及びマップマッチング方法」を提供することである。
【構成】 地図データべースに道路リンクの勾配情報を持たせて記憶しておく。加速度センサー10は自動車の加速度を検出し、勾配判定部30は加速度センサーにより検出された加速度を用いて現在走行中の道路リンクの傾斜角θあるいはθに応じた値(sinθ)を求め、ついで、該傾斜角度と車速とから所定時間ΔTにおける高さ方向移動距離を求めて高低差として累積し、該累積した高低差Hが設定値THより大きくなった時、走行中道路リンクは上りリンクあるいは下りリンクであると判定し、マップマッチング処理部31は該判定結果と勾配情報を用いてマップマッチング処理を行う。
(もっと読む)
マップマッチングシステム
【課題】 高い整備コストを必要とすることなく地図データに対して測位座標を正確に照合することのできるマップマッチングシステムを提供する。
【解決手段】 道路の交差点又は行き止まりを表すノードデータと、ノードデータ同士を結ぶリンクを以って道路を表すリンクデータと、リンクデータに対応する道路の幅を表す道幅情報とを含む地図データを記憶する地図データ記憶手段2と、地図データに基づいてリンクデータに対応する道路面領域を、交差点の隅角の隅切り形状を表す隅切り形状情報を加えて導出する道路面領域導出手段3と、道路面領域に対して測位座標を、地図データに含まれる誤差量を表す誤差情報を加味して照合する測位座標照合手段9とを備える。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】マップマッチングで判定された走行道路と、実際に走行している道路が異なる場合に、実際の走行路に対して単純な操作で迅速且つ容易にマッチング修正を行うことができるナビゲーション装置、方法及びプログラムを提供する。
【解決手段】 本発明は、ユーザにより画面上がスクロールされるか否かを監視し、スクロールした場合にスクロール中心座標のカーソルに最も近い道路を検出し点滅させるマッチング候補検出部46と、ユーザが当該カーソル位置においてカーソルの決定操作を行ったか否か判断し決定操作がなされていれば、当該点滅した道路に強制的にマップマッチングを行う強制マップマッチング部45と、強制マップマッチングがなされると、その結果に応じて地図表示や案内における画面表示等の動作をが制御する制御部47とを備える。
(もっと読む)
車両位置検出装置
【課題】 GPS信号の信頼性に応じた補正処理を行うことができ、精度の高い車両の位置検出を行うことのできる車両位置検出装置を提供する。
【解決手段】 GPS信号を受信するGPS受信機2と、前記GPS信号に基づいてGPS位置A(t)を演算する第1の演算手段と、車両の走行距離を検出する距離検出手段と、前記車両の進行方位を検出する方位検出手段と、前記距離検出手段により検出された走行距離と前記方位検出手段により検出された進行方向とに基づいて相対位置R(t)を演算する第2の演算手段と、を備えた車両位置検出装置であって、前記GPS位置の信頼性を算出する判定手段と、前記判定手段による信頼性および前記第1の演算手段による演算時間を考慮してGPS位置A(t)により相対位置Rを補正する補正手段と、を備えてなる。
(もっと読む)
1,321 - 1,340 / 1,384
[ Back to top ]