
Fターム[5H180FF07]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置誤差の補正、他の位置情報の参照 (1,384)
Fターム[5H180FF07]に分類される特許
1,341 - 1,360 / 1,384
ナビゲーション装置、方法及びプログラム
【課題】マップマッチングで判定された走行道路と、実際に走行している道路が異なる場合に、実際の走行路に対して単純な操作で迅速且つ容易にマッチング修正を行うことができるナビゲーション装置、方法及びプログラムを提供する。
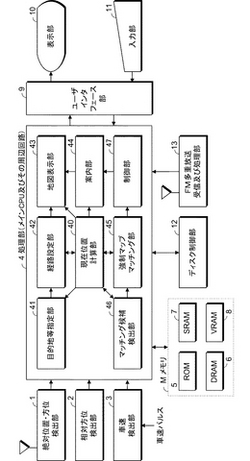
【解決手段】 本発明は、ユーザにより画面上がスクロールされるか否かを監視し、スクロールした場合にスクロール中心座標のカーソルに最も近い道路を検出し点滅させるマッチング候補検出部46と、ユーザが当該カーソル位置においてカーソルの決定操作を行ったか否か判断し決定操作がなされていれば、当該点滅した道路に強制的にマップマッチングを行う強制マップマッチング部45と、強制マップマッチングがなされると、その結果に応じて地図表示や案内における画面表示等の動作をが制御する制御部47とを備える。
(もっと読む)
車両の制御装置

【課題】 走行経路情報の検出精度に対応して車両の挙動をきめ細かく制御することの可能な車両の制御装置を提供する。
【解決手段】 車両の走行経路情報を検出する場合に、各種のセンサの信号から検出される前記車両の走行軌跡と、情報記録媒体に記憶されているデータとを比較して、車両の現在位置を補正するマップマッチングを実行する走行経路情報検出装置と、走行経路情報に対応して設定された制御パターンに基づいて車両の挙動を制御する挙動制御装置とを備えた車両の制御装置において、マップマッチングの実行による車両の現在位置の補正が完了しているか否かを判断することにより、走行経路情報検出装置により検出される走行経路情報の検出精度を検出する精度検出手段(ステップS11,S12,S13)と、走行経路情報の精度に基づいて制御パターンを変更する制御パターン変更手段とを備えている。
(もっと読む)
画像取得システム
【課題】 所望位置の状況を現在時点の実写画像として取得することができる画像取得システムを提供する。
【解決手段】 車両の現在位置を移動電話機19から情報センター21に送信する。情報センター22は各車両の現在位置をIPアドレスと共にデータベース24に蓄積する。車両の移動電話機19から画像取得希望位置を情報センター22に送信すると、情報センター22は画像取得希望位置近くにいる車両をデータベースから検索して該当車両のIPアドレスを画像取得希望の車両に送信する。画像取得希望の車両から画像希望位置近くの車両のIPアドレスに画像送信を希望する旨の要請を送信すると、その車両に搭載された撮影カメラ1で撮影した画像が移動電話機19から要請元の車両に送信される。
(もっと読む)
経路誘導装置
【課題】保有する地図情報では目的地までの経路を設定できない場合でも、外部から取得した補完経路情報により、目的地まで連続した誘導案内を行なえる経路誘導装置の提供。
【解決手段】地図情報を記憶した地図情報記憶部4と、目的地を入力する入力部6と、目的地に対応する補完経路情報を外部より取得する経路情報制御部7と、補完経路情報を記憶する補完経路情報記憶部10と、補完経路情報に含まれる経路の始点座標に近接した道路上にある座標を、地図情報記憶部4に記憶された地図情報に基づく経路探索の終点として設定する連結地点設定部11と、連結地点設定部11が設定した終点までの経路を探索する経路探索部8と、経路探索部8が探索した経路に基づく経路誘導と、経路情報制御部7が取得した補完経路情報に基づく経路誘導とを連続して行なうよう制御する経路誘導制御部12とを備えたことにより、目的地まで連続した誘導案内を行なう。
(もっと読む)
ナビゲーション装置
【課題】 移動体に対するアンテナの設置位置を自動的に精度良く検出することができるナビゲーション装置を提供すること。
【解決手段】 ナビゲーション装置は、GPS衛星から送信される電波に基づいて車両に装着されたアンテナ1の絶対位置を算出する測位手段3と、GPS衛星から送信される電波の受信状態に基づいて、アンテナ1の絶対位置における天空上のGPS衛星の配置を算出する受信衛星予測手段11と、車両の絶対方位を算出する絶対方位算出手段4と、車両の絶対方位に対するGPS衛星の受信状態に基づいて、車両におけるアンテナ1の設置位置を検出するアンテナ位置検出手段12とを備える。
(もっと読む)
カーナビゲーション装置
【目的】高マップマッチング精度と優れた慣性航法システムの学習機能を備えるカーナビゲーション装置を提供する。
【構成】カーナビゲーション装置10は、地図データベース16の道路情報につき、車が道路上から外れるオフロード状態が有り得ない道路か否かの道路識別情報B5を得る道路識別手段と、この道路識別情報B5に基づく推測経路へのマップマッチング時に、所定時間以上衛星測位システム2が連続非測位であり、慣性航法システム1により自車が移動していると判断され、自車位置近傍にオフロード状態が有り得ない道路があると判断された場合、又は、前の自車位置のマッチング率が予め設定の設定値より高く、且つ、自車が地図データベース16のオフロード状態が有り得ない道路上にあると検出された場合には、自車位置をその道路上へ強制的にマップマッチングすると共に、慣性航法システム1の学習強度を強くする強制マップマッチング手段を備える。
(もっと読む)
燃費情報提供システム
【課題】 有用な燃費関連情報を提供できる燃費情報提供システムの提供を目的とする。
【解決手段】 本発明は、複数の車両で取得した実燃費情報をセンタに集約し、該集約した実燃費情報を用いて生成する有用な燃費関連情報を、個々の車両のユーザに提供する燃費情報提供システムにおいて、車両の現在位置を検出する位置検出手段40と、前記検出した車両の現在位置から、車両のユーザにより設定された目的地まで、複数の経路を候補として探索できる経路探索手段42とを車両側又はセンタ側に備え、センタにより生成される前記各探索経路に対するそれぞれの予測燃費情報を受信する受信手段と、前記各探索経路をそれぞれの前記予測燃費情報と対応付けて画面上に出力する出力手段44とを車両側に備えることを特徴とする。
(もっと読む)
算出装置及び車椅子
【課題】 移動体の現時点の正確な位置及び向きを算出すること。外部システム等を必要とせずに、移動体単体において自律的に現時点の正確な位置及び向きを算出すること。
【解決手段】 制御装置140は、光学センサ100a、100bの各検出値を所定の変換係数に従って車椅子1の前後方向への移動変位量に変換し、これらに基づいて車椅子1の走行面に対する位置変位量及び向き変位量を算出する。そして、制御装置140は、算出した位置変位量及び向き変位量を予め定義された基準位置及び基準向きに加算していくことで、車椅子1の現時点の位置及び向きを算出する。さらに、制御装置140は、無線タグ読取装置120から入力された設置位置データに基づいて、当該時点での車椅子1の絶対位置を特定・補正するとともに、前記所定の変換係数を補正する。
(もっと読む)
位置情報提供サーバ、位置情報提供システム、携帯端末およびプログラム
【課題】 携帯端末からGPS衛星受信信号を位置情報提供サーバに送り、位置情報提供サーバ側で高精度に携帯端末の位置を測位してマッチング処理した位置情報を携帯端末に提供する位置情報提供システムを提供する。
【解決手段】 携帯端末30はGPS受信機31と受信信号処理部32と測位要求部33とを有する。位置情報提供サーバ20は、GPS受信データ解析・位置算出部231とマッチング処理部232を有する。携帯端末は、GPS受信機31で受信したGPS衛星信号を受信信号処理部32で処理したGPS受信データを測位要求部33からの測位要求とともに位置情報提供サーバ20に送信し、位置情報提供サーバ20は、GPS受信データ解析・位置算出部231により携帯端末から送られたGPS受信データに基づいて携帯端末の位置を算出し、当該位置をマッチング処理部232によりマッチング処理したマッチング位置情報を生成して携帯端末に配信する。
(もっと読む)
地図表示装置及び地図表示方法
【課題】よりサービス性に富んだ位置情報管理システムを提供する。
【解決手段】携帯端末11は、GPSによる位置測定、携帯電話またはPHSの基地局による位置測定、電波マーカー33による位置測定、及び方向検出器20による自立的位置測定と複数の位置測定手段を有しており、どのような場所でもナビゲーションを行うことが出来るようになっている。携帯端末11からは、同じく携帯端末11を有している第3者の位置をセンターシステム10に問い合わせることにより知ることが出来、徘徊老人や子ども、スキー場でのスキーヤーの行動監視等を行うことができる。携帯端末11には、所持者がよく使う地域の地図データのみがコンパクトに保持されており、この地図データにない地域に行ったときは、センターシステム10から対応する地データをダウンロードして使う。
(もっと読む)
車両の相対方位検出装置
【課題】 ジャイロセンサを利用することなく、かつ、精度良く、車両の相対方位を検出することができる車両の相対方位検出装置を提供する。
【解決手段】 この相対方位検出装置は、車両のハンドル操作に基づいて車両の相対方位を検出するものであって、操舵角度検出手段50によりハンドルの操舵角度を検出し、絶対方位検出手段20によって車両の絶対方位を検出し、検出された操舵角度と絶対方位とに基づいて単位操舵角度あたりの方位変化量を係数として算出し、ハンドル操作時に操舵角度と予め求められている当該係数とに基づいて車両の相対方位を算出する。
(もっと読む)
地図データ補正装置
【課題】 観測する位置参照点の数を減らすことで観測コストを軽減することができる地図データ補正装置を得る。
【解決手段】 地図補正対象エリアの地図データを記憶する地図データ記憶部3と、地図データをメッシュ状に画定した領域に区分けする地図データ読み出し部41と、区分けされたメッシュ毎に地図補正に用いる位置参照候補点を抽出する位置参照候補点抽出部42と、各位置参照候補点におけるGPS測量に対する適合度であるGPS適合度を算出するGPS適合度算出部43と、GPS適合度に基づいて位置参照候補点を抽出すると共に、各メッシュ内に設定した、現実の位置情報を取得する位置参照点の許容数を超えない範囲で抽出した位置参照候補点から位置参照点を選択する位置参照点選択部44と、位置参照点選択部44により選択された位置参照点の位置情報をGPS測量を利用して取得する位置参照点観測部1と、位置参照点観測部1が取得した位置情報に基づいて当該地図データを補正する地図補正部5とを備える。
(もっと読む)
基準受信機において計算した補正に基づくRTKナビゲーション用移動基準受信機
基準局と連動する主受信機とユーザと連動する副受信機との間の相対位置ベクトルを判定する方法及びシステムを提供する。本方法及びシステムは、複数の衛星から受信した信号に応じて基準局において基準局の位置を判定し、ユーザにおいて得られた測定値と基準局において計算した誤差補正値とに基づいて、ユーザにおいてユーザの位置を判定し、基準局の位置及びユーザの位置の差を取ることによって、相対位置ベクトルを計算する。 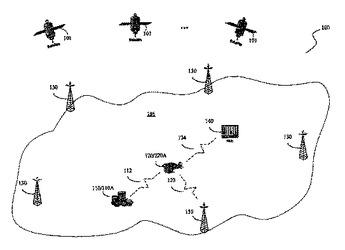 (もっと読む)
(もっと読む)
ナビゲーション装置および位置情報送信ユニット、位置算出方法ならびにプログラム
【課題】 位置情報送信ユニットからの位置情報から現在位置を取得するナビゲーション装置において、より正確な位置情報を得ることができるナビゲーション装置を提供する。
【解決手段】 設置位置の緯度、経度を含む位置情報を送信する位置情報送信ユニット100から位置情報を取得する位置情報取得部34と、位置算出部35と、表示部38とを備えたナビゲーション装置30であって、位置情報取得部34が新たな位置情報送信ユニット100から当該位置情報送信ユニット100が送信する新たな位置情報を受信した際に、前記位置算出部35は前記位置情報取得部34が取得した新たな位置情報に基づいて、当該位置情報送信ユニット100の設置位置から通信距離だけ手前の位置を前記ナビゲーション装置30の現在位置として算出する。
(もっと読む)
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置
電子メディア露出測定システムの精度および到達率を向上させるための方法および装置が開示されている。開示されている方法は、電子デバイスによって記録された場所を表すデータを当該データの完全性または精度のうちの少なくとも1つを向上させるべく処理すること、処理されたデータから位置決定を導出すること、および、導出された位置決定のうちの少なくとも1つを既知の移動コースと整列するべく修正することを含む。 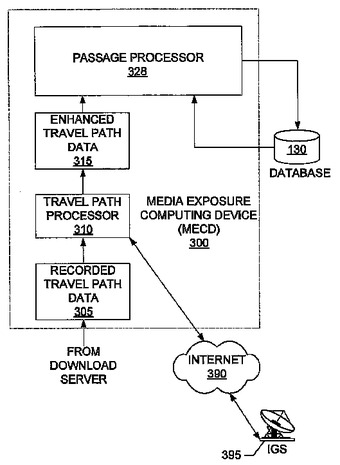 (もっと読む)
(もっと読む)
ナビゲーション装置
【課題】 表示画面上の任意の文字を拡大可能なナビゲーション装置を提供する。
【解決手段】 道路地図及び文字を表示する表示手段19の表示画面24にタッチパネル25が配置されたナビゲーション装置10において、タッチパネル25への接触位置を検知する接触位置検出手段36と、接触位置検出手段36により検出された接触位置に対応する表示画面24上の文字を拡大する文字拡大手段38とを有する。また、文字拡大手段38は、接触位置検出手段36によって検出されるタッチパネル25への接触時間により、拡大される文字の拡大率を変化させることもできる。
(もっと読む)
ナビゲーション装置
【課題】 地図帳を使って各種位置をより直感的にユーザが把握することが可能なナビゲーション装置を提供すること。
【解決手段】 ナビゲーション装置において、データ記憶部4には、地図帳リストDaと、地図帳リストDaに挙げられている地図帳に含まれる各区画の構成要素を表す区画要素データDcとが記録される。演算処理部3は、データ記憶部4には区画要素データDcに基づいて、各種位置について案内情報を作成する。出力部5は、演算処理部3で作成された案内情報を出力する。
(もっと読む)
車載用ナビゲーション装置とこれに用いる車線位置推定装置
【課題】 走行中の車線位置を正確に推定することができる車載用ナビゲーション装置を提供することを目的とする。
【解決手段】 GPS部7、地図情報記憶部2とを備える車載用ナビゲーション装置50において、CPU1は現在位置算出部21、カメラ11のカメラ画像から白線を検知する白線検知部22、走行車線位置推定部23、案内タイミング制御部24を有している。CPUにはウインカスイッチ12の操作信号が入力される。走行車線位置推定部は、自車両の走行道路を検出すると、ウインカ操作信号と白線検知部から信号により車線変更を判定し、自車両が走行中の車線位置を特定する。案内タイミング制御部は、前方の分岐を検出し、特定された車線にもとづき、所定の距離手前位置で、運転者に対して分岐案内を行うように制御する。
(もっと読む)
ナビゲーション装置およびプログラム
【課題】経路計算処理において、利用者の好みを取り入れながら適当な経路を計算する。
【解決手段】特定経路としての経路Aが遠回りと判断した場合には(S150:Y)、経路Aの計算時に参照した推奨用コストテーブルについて、代替経路としての経路Bに含まれる道路種別のうち経路Aに含まれる道路種別とは重複しない道路種別に対応する距離補正係数を「普通」から「通りやすい」へ変更し、その変更後の推奨用コストテーブルを参照して経路Aを再計算する(S190、S120)。つまり、経路計算処理において特定経路としての経路Aを代替経路としての経路Bが有する傾向を反映させるように再計算する。
(もっと読む)
車両の走行支援装置
【課題】 自車両周辺の外界の状況を精度良く検知し、自車両の走行支援を適切に行う。
【解決手段】 受信電力検知部25は情報送受信部12にて受信した対象物情報の受信電力を発信元である各他車両毎に算出する。受信電力算出部29は自車両と他車両との相対距離に応じて、自車両と他車両との車車間通信で検知される受信電力を算出する。見通し判定部30は受信電力検知部25にて検知された各他車両毎の受信電力と、受信電力算出部29にて算出された受信電力とを比較し、自車両と他車両との間の相対的な見通し状態を推定する。走行支援判定部31は自車両と他車両との相対的な見通し状態と、道路形状認識部26にて検知された自車両の進行方向の道路形状と、相対速度判定部28にて算出された自車両と他車両との相対速度とに基づき、走行支援レベルを設定し、走行支援レベルに応じて制動装置16および警報装置17を作動させる。
(もっと読む)
1,341 - 1,360 / 1,384
[ Back to top ]