
Fターム[5H180FF07]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置誤差の補正、他の位置情報の参照 (1,384)
Fターム[5H180FF07]に分類される特許
1,261 - 1,280 / 1,384
入力装置およびプログラム
【課題】音声認識による操作の容易さを保ちつつ、さらに容易にユーザの意図に沿った操作指示の入力が可能な入力装置等を提供する。
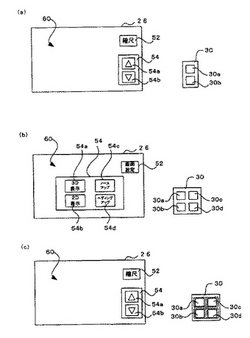
【解決手段】ユーザが発話した「しゅくしゃく」という音声を認識し、認識語彙「しゅくしゃく」に対応する機能としてスイッチ30aに対して縮尺を広域に変更する機能、スイッチ30bに対して縮尺を詳細に変更する機能を割り当てる。ここで、スイッチ30a、30b、30c、30dの4つの入力部に対し、機能(縮尺と詳細の2つ)の数が少ない場合に、スイッチ30cに対してもスイッチ30aと同じ縮尺を広域に変更する機能を割り当て、スイッチ30dに対してもスイッチ30bと同じ縮尺を詳細に変更する機能を割り当てる。
(もっと読む)
車両の走行制御装置

【課題】 実際の道路状況やドライバの意志等を経路に的確に反映させて利便性の高い自動操縦制御を実現することができる車両の走行制御装置を提供する。
【解決手段】 制御装置8は、基準局4との通信が確立した際に、測位される自車位置に基づいて取得した走行ルートを用いて自車両1に対する走行制御ルートを学習する走行制御ルート学習制御、或いは、各走行制御ルートの中から利用可能な所定の走行制御ルートを選択して自車両1を自動操縦する自動操縦制御の何れかを予め設定された条件に従って選択的に実行可能な構成であり、しかも、ユーザによって走行制御ルート学習制御が選択されている場合には、当該走行制御ルート学習制御を優先的に選択して実行する構成となっている。これにより、実際の道路状況やドライバの意志等を経路(走行制御ルート)に適切に反映させることができ、利便性の高い自動操縦制御を実現することができる。
(もっと読む)
車両の走行支援装置
【課題】運転者の所望する走行軌跡に沿った目標進行路を比較的簡単に構築することができるようにする。
【解決手段】基準局4を駐車スペースの近くに設置し、基準局4の通信可能エリア内で自車両1を走行させることで駐車スペースまでの走行データを取得し(S2)、取得した走行データに基づいて生成したノード列βと前回の生成したノード列αとのノード数αn,βnを比較し、少ないノード数αn(或いはβn)のノード列α(或いはβ)を基本ノード列κとして設定し(S5)、基本ノード列κのノード点を基準に他方のノード列β(或いはα)の距離差が最小のノード点を選択し(S7)、この両ノード点の平均値で、基本ノード列κのノード点を学習し(S8)、学習ノード列γを生成する(S9)。そして、この学習ノード列γに基づいて駐車スペースまでの目標進行路を生成し自車両1を自動操縦制御させる。
(もっと読む)
ナビゲーション装置
【課題】 地図の表示範囲の制御を単純化し、操作ミスを少なくする。
【解決手段】 目的地などの地点入力に基づき経路探索を行い、探索した経路にしたがって経路案内を行うナビゲーション装置において、地図データを記憶する記憶手段3と、回転操作とエンター操作により入力操作を行うためのジョグダイヤル11と、地図を表示する表示手段12と、ジョグダイヤルの操作に応じて記憶手段3に記憶した地図データを読み出して表示手段12に地図を表示する表示制御手段4とを備え、表示制御手段4は、ジョグダイヤル11が回転操作されている間は回転操作の方向に応じて地図のズーム制御を行い、ジョグダイヤル11の回転操作が止められると地図の移動制御を行うモードを選択可能な状態にする。
(もっと読む)
乗車位置案内システム、経路探索サーバおよびプログラムならびに乗車位置案内端末
【課題】 歩行者がタクシーで移動する場合に、目的地への有利な経路を選択できるよう、その乗車位置を案内できるようにした乗車位置経路探索システムを提供する。
【解決手段】 経路探索サーバ30は、道路ネットワークデータと歩行者ネットワークデータを含む探索用ネットワークデータ35と、経路探索手段33と、リンク抽出手段39と、乗車位置情報作成手段40を備え、リンク抽出手段39は、乗車位置案内端末20から受信した出発地に基づいて、当該出発地の位置からの距離が所定の範囲内の道路ネットワークデータ上の道路を特定して当該道路のリンクを抽出し、経路探索手段33は、リンク抽出手段39が抽出したリンクをそれぞれ出発リンクとして目的地までの経路を探索して推奨経路を決定し、乗車位置情報作成手段40は、推奨経路の情報と出発地と出発リンクの位置を乗車案内位置として含む乗車位置案内情報を作成する。
(もっと読む)
車両支援方法及び車両支援装置
【課題】 勾配変化地点の先にコーナ開始点が存在し、そのコーナ開始点が視認できないとき、その旨を報知して運転者に的確な道路情報を伝達して走行中の違和感を解消する車両支援方法及び車両支援装置を提供する。
【解決手段】 車両C1の自車位置Paから予め定めた所定距離にコーナ開始点Pbと勾配変化点Pcがあって、その勾配変化点Pcが自車位置Paとコーナ開始点Pbの間にある時、自車位置Paからコーナ開始点Pbが視認できるかどうか判定する。そして、自車位置Paからコーナ開始点Pbが視認できないと判定したとき、その旨を運転者に報知する。
(もっと読む)
移動体端末装置及びハードディスクドライブ装置
【課題】 携帯端末にハードディスクドライブ装置を内蔵させて、ナビゲーションなどの各種アプリケーションを実行する構成とした場合に、別体のセンサを必要とする問題を回避する。
【解決手段】 データを記憶するハードディスクを備えたハードディスクドライブを内蔵した移動体端末装置において、ハードディスクドライブを収納し装置本体に対して揺動自在に配置された筐体202と、その筐体202が揺動する方向を検出するセンサ211〜216とを備えて、そのセンサ211〜216の出力から加速度又は角速度を検出して、所定のアプリケーションプログラムを実行する際に、その検出された加速度又は角速度を利用するようにした。
(もっと読む)
迷子・誘拐防止システム
【課題】従来の発明では、特定の施設内での誘拐防止にとどまっており、広範囲での迷子・誘拐防止には貢献しないものであり、また誘拐が発生した状態を自動判定することが出来ないために、誘拐が発生したことを認識するまでに時間がかかってしまうため、被害者を救出するまでに多くの時間を費やす結果を招きやすくなっていた。
【解決手段】本発明は、無線通信手段、位置検出手段、状態判定手段17、警報発令手段18を供えた携帯移動体通信端末1をサービス対象者(子供や高齢者)に所持させ、保護者移動体通信端末2、システムサーバ3、ローカルサーバ4、絶対位置情報送信手段5を連携させることによって、迷子及び誘拐事件早期認識、解決のための支援システムを提供し、更に誘拐事件等を未然に防ぐことを可能にしている。
(もっと読む)
交通状態収集装置、情報センタ、および交通状態収集システム
【課題】 ユーザの利便性を向上させること。
【解決手段】 交通状態収集装置は、他車両の走行情報を受信する他車両情報受信手段と、他車両情報受信手段により受信された他車両の走行情報に基づいて、任意の道路区間における交通状態情報を算出する交通情報算出手段と、交通情報算出手段により算出された交通状態情報を情報センタに送信する情報送信手段と、を備える。
(もっと読む)
測位装置、測位方法および測位プログラム
【課題】 測位位置のバラツキのある環境下における測位精度を向上させる。
【解決手段】複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を推定する重み付き回帰推定手段7および複数の測位結果に基づいて重み付き回帰推定における重みを算出する重み算出手段6をフィルタリング処理手段5に設け、複数の測位結果に基づいて重み付き回帰推定における重みを更新しながら、複数の測位位置を用いた重み付き回帰推定に基づいて現在位置を算出する。
(もっと読む)
ナビゲーション装置
【課題】車両がY字分岐路を通過した後に、車両の現在位置の表示が不自然な挙動を示すことを抑えるナビゲーション装置20を提供する。
【解決手段】ナビゲーション装置20は、前回の車両の現在位置に基づき得られた候補点である第1の候補点の信頼度と、第1の候補点以外の候補点である第2の候補点の信頼度とを比較する場合において、第1の候補点が位置するリンクと第2の候補点が位置するリンクとの方位差が予め定められた所定角度未満ならば、第1の候補点の信頼度に予め定められた第1のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較し、当該方位差が所定角度未満ならば、第1の候補点の信頼度に、第1のバイアス値よりも小さい第2のバイアス値を加算した上で、第1の候補点の信頼度と第2の候補点の信頼度とを比較する現在位置決定部205を備える。
(もっと読む)
走行支援装置
【課題】 運転者によるブレーキの緩め始めの早いタイミングで警報出力を行うことによって安全性を高めるとともに、不必要な警報出力を抑制することにより運転者に不快感や違和感を与えることがない走行支援装置を提供する。
【解決手段】 自車両の周囲の障害物を検出する障害物検出手段10と、自車両が進行方向に進行することに対する危険性を判定する危険性判定手段5と、ブレーキ踏力の状態を検出するブレーキ踏力検出手段23と、警報判定手段6とを備え、この警報判定手段6は、危険性判定手段5により危険性ありと判定され、かつブレーキ踏力検出手段23によりブレーキ踏力が緩み側に所定量変化したことを検出した際に、警報出力を行うと判定する。
(もっと読む)
ナビゲーション装置
【課題】 地図データ上に存在しない高速道路上を走行中に、誤って付近の一般道路にマップマッチングしてしまうことを防止することができ、ひいては、自車位置のずれを抑えることができ、ユーザに対して違和感なく自車位置を呈示することができる「ナビゲーション装置」を提供すること。
【解決手段】 自車位置が地図データにおける高速道路21上から外れた場合に、自車の速度が判定基準速度以上の速度であるか否かを判定し、前記自車の速度が前記判定基準速度以上の速度であれば、マップマッチング処理を停止すること。
(もっと読む)
測位装置、測位装置の制御方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】移動しつつ現在位置を計算する場合において、出力位置の直進性及び連続性を向上することができる測位装置等を提供すること。
【解決手段】測位情報格納手段Buff2に格納されている測位情報P2に基づいて、回帰直線L1を生成する回帰直線生成手段と、回帰直線L1上の現在位置を示す回帰直線上位置情報を生成する回帰直線上位置情報生成手段と、暫定位置P6と回帰直線上位置P7の平均位置P8を示す平均位置情報を生成する平均位置情報生成手段と、平均位置情報に基づいて、回帰直線L1を更新して更新回帰直線L2を生成する更新回帰直線生成手段と、更新回帰直線上の現在位置P9を示す更新回帰直線上位置情報を生成する更新回帰直線上位置情報生成手段と、更新回帰直線上位置情報を出力する更新回帰直線上位置情報出力手段と、を有する。
(もっと読む)
車載用ナビゲーション装置
【課題】分岐する2本の道路のなす角度が微小であっても分岐後の自車位置を高精度に表示できる「車載用ナビゲーション装置」を提供する。
【解決手段】車載用ナビゲーション装置は、メモリ手段と、走行状態検出手段と、GPS受信手段と、制御手段とを有する。前記制御手段は、第1の道路上の分岐点での第2の道路のなす角度が所定の分岐角度より小さく(S11)且つ分岐後の前記第1の道路と第2の道路のなす角度が所定の角度より小さい(S12)場合において、自車位置が前記第1又は第2の道路に進入したことを検出したときに、GPS測位点を中心とした誤差円を所定の割合で段階的に小さくしながら(S15)該誤差円の範囲内に前記自車位置が存在するか否かを判定し、当該誤差円の範囲から自車位置が外れたときに該自車位置を前記第1又は第2の道路のうち当該誤差円の範囲内の道路にマッチングさせる。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】実測値にしたがった現在位置算出の迅速化を図ること。
【解決手段】現在位置算出装置は、移動体の移動状態に応じて変動する検出信号を検出する検出部201と、検出部201によって検出された検出信号のデジタル変換を行う変換部202と、移動体の測位情報を取得する取得部203と、取得部203によって測位情報を取得した時刻を測位時刻情報として変換部202に出力する出力部204と、変換部202を介して出力された測位時刻情報に基づいて、取得部203によって取得された測位情報および変換部202によってデジタル変換された検出信号との同期を取る同期部205と、同期部205によって同期が取られた測位情報および検出信号に基づいて、移動体の現在位置を算出する位置算出部206と、を備えることを特徴とする。
(もっと読む)
プローブ交通情報のデータ処理システム、プローブ交通情報のデータ処理装置、およびプローブ交通情報のデータ処理方法
【課題】携帯電話の基地局との通話、非通話の情報により携帯電話の位置を推定し、その位置情報をプローブデータに用い、道路地図データとのマッチングにより、道路の交通渋滞情報を生成することにより設備投資が少なく全国規模の渋滞情報を生成することのできるプローブ交通情報のデータ処理システムを提供すること。
【解決手段】運転者あるいは同乗者の持つ携帯電話を利用し、基地局とのやり取り(通話のとき、非通話のときはポーリング)によって得られる携帯電話の位置情報を収集してプローブデータとして取り込み、道路地図データとマッチングさせて、道路の交通渋滞情報を生成する。そして、携帯電話を持つ運転手の営業車が、当初予測している範囲内の移動でない場合、携帯電話の位置データがプローブ情報として適しているか否かを判定することによってより正確な交通渋滞情報を生成する。
(もっと読む)
車載情報端末、自動車の走行制御システム、自動車の走行制御装置及び方法
【課題】走行経路に応じて設定された目標速度に応じて自車の速度を制御するためには、走行経路の判定精度を向上させる必要がある。
【解決手段】地図情報に応じて自車位置の検出または推定を行い、画像情報と自車の操舵角に応じて自車の走行車線を認識し、検出または推定された自車位置と認識された走行車線に応じて走行経路を判定する。例えば、画像情報と自車の速度微分値に応じて自車近傍の道路勾配を認識し、検出または推定された自車位置と認識された道路勾配に応じて走行経路を判定する。あるいは、画像情報ないしインフラストラクチャから受信した信号に応じて自車前方の料金収受装置の種類を認識し、検出または推定された自車位置と認識された料金収受装置の種類に応じて走行経路を判定する。判定された走行経路に応じて自車の目標速度を設定し、設定された目標速度に応じて自車の速度を制御する。
(もっと読む)
車両間通信システム
【課題】 自車両が検出できなかった移動体の存在を運転者に知らせることが可能な車両間通信システムを提供する。
【解決手段】 車両同士が通信を行う車両間通信システムであって、車両ごとに設けられた、当該車両の周囲を撮像するカメラ11,11と、カメラ11,11によって撮像された画像から移動体を検出する対象物検出部32と、車両ごとに設けられた、音声を発するスピーカ21と、車両ごとに設けられた、当該車両のスピーカに発音させる音声に関する音声データを生成する音声データ生成部41dと、車両ごとに設けられた、データの送受信を行う送受信機19と、を備え、一の車両の音声データ生成部41dは、他の車両の対象物検出部32によって検出された移動体の存在を知らせる音声データを生成し、スピーカ21に出力する。
(もっと読む)
位置標定システム及び車載装置
【課題】移動体の位置精度を改良し、将来の高精度化への課題を解決する。
【解決手段】移動体から発射された電波を反射するレーンマーカ13と、レーンマーカ13が設置された位置を示す位置情報を送信するビーコン11、12と、移動体に搭載される車載装置14とを備え、車載装置14は、レーンマーカ13に対する移動体の位置を検出する位置検出手段と、ビーコン11、12から送信されたレーンマーカ13の位置情報を取得する位置情報取得手段と、レーンマーカ13に対する移動体の位置及びレーンマーカ13の位置情報に基づいて算出した移動体の位置により移動体の位置を標定する位置標定手段とを備える。
(もっと読む)
1,261 - 1,280 / 1,384
[ Back to top ]