
Fターム[5H180FF22]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 位置・経路の誘導・案内指示装置 (32,912) | 道路図などの地図形式のもの (7,732)
Fターム[5H180FF22]の下位に属するFターム
概略図、デフォルメされた地図 (315)
Fターム[5H180FF22]に分類される特許
2,361 - 2,380 / 7,417
地図表示装置および地図表示方法
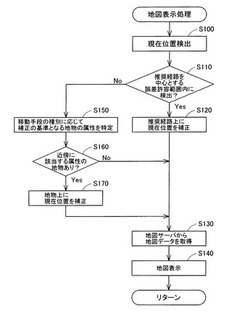
【課題】推奨経路や道路ネットワークを表すデータを用いることなく、地図表示装置が検出した現在位置を地図上の適切な位置に表示する。
【解決手段】地図表示装置としての携帯電話は、地図サーバから地図データを取得する。地図データには、地物の位置及び形状を表す図形データと、地物の種別を表す属性情報とがそれぞれ対応付けられて複数記録されている。携帯電話は、GPS受信機を用いて現在位置を検出すると、検出された現在位置の近傍に存在し、利用者が存在し得る地物を、図形データと属性情報とに基づき特定する。こうして、現在位置の補正の基準となる地物を特定すると、携帯電話は、特定された地物上の所定の位置に現在位置を表示する。
(もっと読む)
運転支援装置、運転支援方法及びコンピュータプログラム

【課題】車両の走行するレーンを考慮することにより、車両が通行の規制されている規制道路へ進入する場合を確実に予測することが可能な運転支援装置、運転支援方法及びコンピュータプログラムに関するものである。
【解決手段】後方カメラ3で撮像した撮像画像から車両が現在走行する走行レーンを特定し、特定した走行レーンとウィンカーランプ7A〜7Dの点灯状態と道路形状とに基づいて、車両2が進行方向にある分岐点において、特に車両の通行が規制される規制道路へと進入することが予測された場合に、規制道路に関する警告を行うように構成する。
(もっと読む)
ナビゲーション装置及びナビゲーションプログラム
【課題】現在位置情報が有する誤差の影響を抑制して高精度な目的地到着判定を行うことを可能とすることにより、ユーザを適切に目的地まで誘導することのできるナビゲーション装置及びナビゲーションプログラムを提供する。
【解決手段】目的地が設定された際に、当該目的地までの経路の案内を行うナビゲーション装置であって、自車位置周辺の画像情報を取得する画像情報取得手段6と、前記画像情報に含まれる地物の画像認識を行う画像認識手段8と、地物の位置及び形態に関する情報を含む地物情報を取得する地物情報取得手段4と、前記地物情報取得手段により取得される前記地物情報に基づいて、前記目的地から近接距離内に存在する一又は二以上の地物を判定地物として決定する判定地物決定手段5と、前記画像認識手段により当該判定地物が画像認識された際に、前記目的地に到着したと判定する到着判定手段9と、を備える。
(もっと読む)
ナビゲーション装置
【課題】音声報知が他の音声報知と重なったときに何れか一方の音声報知の出力ポイントを変更しあるいは何れか一方の音声報知を別途報知する。
【解決手段】ナビゲーション装置1は、音声を出力するスピーカ20と、各音声報知毎に音声報知の標準開始ポイントである第1開始ポイントと、該第1開始ポイントで出力しようとする音声報知が他の音声報知と重複したときに開始ポイントを変更できる変更範囲を記憶した第2記憶手段(RAM23)を備え、前記制御手段は前記第1開始ポイントで出力しようとする音声報知が、他の開始ポイントで出力できる音声報知と重複したときに該他の音声報知の開始ポイントを前記変更範囲内で重複しないポイントに変更する。
(もっと読む)
無線通信装置
【課題】通信の干渉を抑え、車両間で適切に衝突回避を目的とした通信を行うことができるようにする。
【解決手段】無線通信装置1は、状態検出器57で検出された自車両の位置座標及び速度ベクトルを記述した通信パケットを、送信部21を通じ、予め設定された送信電力及び送信周期で、外部にブロードキャストする。また、受信部25を通じて他車両の無線通信装置から受信した通信パケットに基づき、通信パケットの送信電力及び送信周期を設定する。具体的には、受信した通信パケットが示す送信元車両の速度ベクトルに基づき、自車両周囲の車両の中で、相対速度ベクトルの絶対値が最大の車両を、危険車両として設定する。そして、自車両を基準とした危険車両の相対距離及び相対速度ベクトル絶対値に基づき、上記送信電力を、相対距離が長い程大きくするように切り替え、送信周期を、相対速度ベクトル絶対値が大きい程短くするように切り替える。
(もっと読む)
道路交通情報装置
【課題】ドライバーが前もってその運転を最適化するように計画を立てることを可能にする道路交通情報装置を提供する。
【解決手段】本発明は、道路網内における道程の所要時間についてドライバーに情報を与えるために設計された片方向無線メッセージの携帯可能な受信器(10)を含む道路交通情報装置であって、この受信器にはエレクトロニクスの中央処理装置と、記憶装置と、キーボード(12)とそしてスクリーン(11)とが含まれている道路交通情報装置に関する。この受信器の記憶装置には、道路網の各区間ごとに、出発点と、到達点とそして道程の基本所要時間とが収められる。更に、中央処理装置は、受信された無線メッセージに応じて、区間の道程の基本所要時間を更新し、そして記憶された上記道程の基本所要時間に応じて、所望の出発点と到達点間の全道程の所要時間を計算しそして表示するようになっている。
(もっと読む)
車両走行支援装置及びプログラム
【課題】信号機の変化順序が分かりにくい交差点においても間違いなく安心して交差点を通過できるようにする。
【解決手段】地図上に車両の現在位置を表示して走行を支援する車両走行支援装置において、車両の現在位置を検出する現在位置検出手段(1)と、地図情報、交差点情報を記憶する情報記憶手段(3)と、現在位置を地図上に表示して走行支援する制御手段(2)とを備え、前記制御手段は、前記情報記憶手段から交差点情報を読み出し、信号機の変化順序を示す交差点通過パターンを有する交差点において、前記交差点通過パターンを案内表示する。
(もっと読む)
経路探索装置及び経路探索用プログラム
【課題】移動体の移動前の計画段階において、移動を開始してしまってからでは採り得ない移動諸元をも幅広く考慮して効率的な移動計画の作成に資することが可能な経路探索装置等を提供する。
【解決手段】目的地点への移動体の移動の計画作成に用いられるルートを探索する場合に、目的地点への移動体の出発予定時刻を入力し(ステップS1)、入力された出発予定時刻に出発するとした場合のルートの諸元を算出し(ステップS2)、入力された出発予定時刻以外の時刻に出発するとした場合のルートの諸元を算出し(ステップS10、S11)、夫々算出された諸元を比較し(ステップS12)、比較結果として元の出発時刻以外の時刻に出発された方が効率的である場合、その比較結果を表示する(ステップS16、S17)。
(もっと読む)
ナビゲーション装置、プログラム
【課題】目的地までの経路上の気象情報の検出をより正確かつ実態に即した気象情報の検出とする技術を提供すること。
【解決手段】設定対象とした走行路から所定範囲内の領域を検出領域として規定する。外部通信機が取得した気象情報を参照して、検出領域内に気象警報が存在するか否かを判断する。肯定判断である場合には、気象現象による影響があるとみなし、その旨をユーザに通知する。具体的には、走行路、検出領域および気象警報の影響領域を表示装置に表示する。
(もっと読む)
車両用遠隔操作装置
【課題】安全運転の妨げにならず、運転者の操作が可能か否かが明確となる車両用遠隔操作装置を提供する。
【解決手段】車両のフロントガラス下縁よりも下方にて運転席から操作可能な位置に設置された操作入力部と、運転席の前方にてフロントガラス下縁よりも上方に設置され、操作入力部上での入力位置を示すための操作系座標と一義的な対応関係を有する表示座標系を有し、操作系座標上の予め定められたアイコン操作位置に対応する位置に操作アイコンを表示する入力表示部と、操作が非制限となる非制限操作アイコンを操作しようとする手部分と非制限操作アイコンとの重なり画像領域と、操作が制限される制限操作アイコンを操作しようとする手部分と制限操作アイコンとの重なり画像領域との表示状態が互いに異なるものとなるように、手画像と操作アイコンとを合成表示する手画像合成表示制御手段と、を備える車両用遠隔操作装置として提供可能である。
(もっと読む)
情報収集・配信システム、情報収集・配信サーバ、ユーザ端末装置、及び情報収集・配信方法
【課題】空車タクシーにいち早く乗車できる可能性が高い場所又は道路を提示するシステムを提供する。
【解決手段】タクシー端末装置40と、情報収集・配信サーバ30と、ユーザ端末装置20と、を備えた情報収集・配信システム10であって、タクシー端末装置40は空車判別手段44によって自車の空車状態を検出した場合に現在位置検出手段43が検出した走行位置を含むタクシー情報を情報収集・配信サーバ50に送信し、情報収集・配信サーバ50は、空車タクシー情報データベース60と空車タクシー情報抽出手段54とを備え、ユーザ端末装置20の空車タクシー情報要求手段24が所定エリアの空車タクシーの情報に関する問合せを情報収集・配信サーバに50行うと、情報収集・配信サーバ50の空車タクシー情報抽出手段54は、空車タクシー情報データベース60を参照して所定エリアのタクシー走行頻度を抽出して配信しユーザ端末装置20に案内する。
(もっと読む)
ナビゲーション装置
【課題】あらかじめ目的地周囲に有名な景勝地や観光施設が存在することを知らなくても、ユーザは、目的地周囲の有名な景勝地や観光施設に立ち寄ることができる、ナビゲーション装置を提供する。
【解決手段】ナビゲーション装置は、渋滞している道路を通過する推奨経路を探索する。したがって、ナビゲーション装置は、車両が交差点36を左折し、有名な景勝地である××寺院34の側の渋滞している道路を通過して、○○公園33に到着するような推奨経路32を探索する。
(もっと読む)
現在位置算出装置および車両
【課題】現在位置算出装置の現在位置精度を向上させる。
【解決手段】ABS用加速度センサ12a〜12d自体の傾斜角度θa〜θdを算出し、道路に対する車両10の傾斜角度αの影響を排除するように、加速度センサ11bのオフセット電圧の補正を行う。これにより、加速度センサ11bで検出される加速度に基づいて、車両10が走行する道路の傾斜角度θが正しく算出されて、車両10の高さ位置が正しく算出されるようになる。したがって、車両の現在位置が正しく算出されるようになり、カーナビゲーション装置1の現在位置算出精度を向上できる。
(もっと読む)
カーナビゲーション連携システム、それに用いる装置、方法およびプログラム
【課題】ユーザが車両から離れても、容易に、カーナビ装置が提供する施設のサービス情報を利用することができるようにする。
【解決手段】ユーザ操作に応じて、指定された場所またはそれまでのルートの近傍に位置する施設の情報を検索する検索手段を備え、検索手段の検索結果を提示するカーナビゲーション装置であって、検索手段が検索した情報のうち施設が利用者に提供する情報であるサービス情報を所定の条件に基づいて抜き出して、所定の携帯端末に向けて出力するサービス情報出力部を備えたことを特徴とする。
(もっと読む)
対象特定装置、対象特定方法および対象特定プログラム
【課題】道路周辺の地物の高精度な位置情報を容易に取得できるようにすることを目的とする。
【解決手段】計測車両200は道路を走行し、カメラ240は異なる地点から同一の道路標識を撮像し、GPS受信機210は各時刻における計測車両200の位置を測定し、LRF250は道路周辺の地物に対して距離方位データを取得する。三次元点群モデル復元部130は距離方位データを座標値で表した三次元点群モデルを生成し、点群画像投影部140は三次元点群モデルを撮像画像Aおよび撮像画像Bに投影する。グルーピング部150は道路標識の撮像範囲に投影された点群を抽出し、撮像範囲内の点群をグループ分けする。そして、標識点群特定部160は撮像画像Aの撮像範囲と撮像画像Bの撮像範囲とで一致したグループの点群を道路標識の点群として特定し、標識位置計算部170は特定された点群の座標値に基づいて道路標識の位置を算出する。
(もっと読む)
地図情報生成装置、ナビゲーション装置、地図情報生成方法、及び、地図画像表示装置
【課題】視認性を低下させることなく、利用者が必要とする属性のマークを表示する。
【解決手段】スケール検出手段11aによって表示対象の地図のスケールが検出されると、該スケールに対応した属性情報が属性情報取得手段11bによって取得され、且つ、該スケールに対応した地図画像が地図画像取得手段11cによって取得される。そして、その属性情報が示す属性のマークを地図画像上に表示するための地図情報が地図情報生成手段11dによって生成されるため、この地図情報を表示することで、視認性を低下させることなく、利用者が必要とする属性のマークを表示することができる。
(もっと読む)
移動体ナビゲーション装置及び地図画像表示方法
【課題】 地域や季節や時間帯にかかわらず、移動体から観察される実際の光景に対応した写実的な地図画像を容易に表示することができる視認性に優れた移動体ナビゲーション装置及び地図画像表示方法を得る。
【解決手段】 移動体ナビゲーション装置が、移動体の現在位置及び現在方位を検出する位置検出手段10と、記憶媒体または外部から地図情報を取得する地図情報取得手段20と、地図情報に基づき現在位置周辺または任意位置周辺の地図画像を表示する出力手段50と、現在位置における現在の年月日時刻を検出する時刻検出手段70と、現在位置及び現在の年月日時刻における天体の天空位置に対応する仰角または方位角を算出する天体位置算出手段80と、現在位置と現在方位と現在の年月日時刻と仰角または方位角とに基づき地図画像の表示形態を変更する表示形態変更手段90とを備え、表示形態変更手段90は地図画像の表示形態を段階的に変更するようにした。
(もっと読む)
ナビゲーション装置
【課題】誘導ポイントを立体映像で迅速に確認することができるナビゲーション装置を提供する。
【解決手段】ユーザが、表示モニタに表示されている早送りボタンを押圧した場合、自車位置から見える道路周辺の風景を模した道路周辺の立体映像が表示モニタに表示される。自車位置に対応する立体映像が表示された後、自車位置から、誘導ポイントより所定距離手前の位置までの道路周辺の風景を表示した立体映像が早送りで表示される。誘導ポイントより所定距離の位置から、誘導ポイントを所定距離進んだ位置までの立体映像が、実際に車両が右左折するときに見える道路周辺の風景の移り変わりと同じように表示される再生速度(通常再生速度)で表示される。これらの立体映像は、所定時間に表示される。
(もっと読む)
ナビゲーション装置、その制御方法及び制御プログラム
【課題】ナビゲーションの技術において、迂回先の経由地等を指定するまでも無く、簡便な操作により、迂回したい領域の指定を受け付けて反映した好適な経路を設定する。
【解決手段】動作切替手段43は、誘導ポイントへの接近を接近検出手段42で検出した場合は、所定の迂回設定モードに切り替え、その動作として、地図上で領域を指定するタッチ操作がタッチパネル11であれば、迂回設定手段44がその領域について、誘導経路において迂回すべき迂回領域として指定を受け付けて設定する。迂回設定手段44で設定された前記迂回領域内について、迂回経路再探索手段45は、経路探索計算におけるリンクコストを変化させたうえ、迂回経路再探索のために経路設定手段41に経路計算要求を行う。
(もっと読む)
移動先予測装置、移動先予測方法及びナビゲーション装置
【課題】従来よりも高い精度で移動先を予測することができる移動先予測装置を提供する。
【解決手段】複数の移動先候補を順序づけて選出する移動先候補選出部112と、選出された移動先候補を順序づけに従って表示する描画処理部117と、一定の単位期間当たりに一定の移動頻度で移動体が当該移動先候補に移動するという規則を決定する規則決定部130と、単位期間において移動体が移動先候補に移動した実績頻度を特定する単位期間頻度積算部115と、複数の移動先候補のそれぞれについて、実績頻度が規則に含まれる移動頻度に達しているか否かを判断する実績頻度判断部116とを備え、描画処理部117は、実績頻度が規則を満たしていると判断された場合に、当該判断の結果が反映されるように、移動先候補を表示し、規則決定部130は、単位期間を設定する期間設定部113と、単位期間における頻度を規則として決定する規則抽出部114とを有する。
(もっと読む)
2,361 - 2,380 / 7,417
[ Back to top ]