
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,781 - 2,800 / 2,931
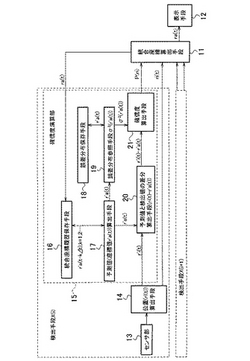
移動体の周囲物体検出装置及び移動体の周囲物体検出方法
【課題】検出精度を向上させることのできる移動体の周囲物体検出装置及び方法を提供する。
【解決手段】複数の検出手段X(i),X(i+1)・・を有し、各検出手段は、自車両の周囲に存在する物体を検出するセンサ部13と、センサ部13で検出された物体と自車両との間の相対位置データを求める位置算出手段14と、センサ部13の検出データに基づいて、自車両と物体との間の相対位置データの確信度データを求める確信度演算手段15とを有する。そして、各検出手段で求められた確信度データに基づいて、この検出手段で求められた相対位置データを重み付け処理し、重み付け処理された各相対位置データに基づいて、自車両と物体との相対位置を求める統合座標算出手段11を備えたことを特徴とする。
(もっと読む)
走行制御装置

【課題】二輪車が追い越した先々行車を対象に走行制御をする場合でも、運転者に違和感を与えることなく走行制御できる。
【解決手段】走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が減速中の場合には(ステップS5)、予め目標車間距離L*を長くし、さらにきびきびとした追従特性にする(前記ステップS6)。また、走行制御装置は、先行車両である二輪車に追い越し傾向があり(ステップS4)、かつその二輪車が加速中の場合には(ステップS7)、予め目標車間距離L*を長くし、さらに緩やかな追従特性にする(ステップS8)。
(もっと読む)
車両用走行軌跡推定装置
【課題】 停止した車両が発進する場合に、発進後の走行軌跡を精度良く推定できるようにする。
【解決手段】 停止状態判定手段M5が車両の停止を判定しているとき、あるいは車速センサ11で検出した車速が所定値以下であり、かつヨーレートセンサ12で検出した単位時間あたりのヨーレートの変化量が所定値以上のとき、つまりヨーレートセンサ12が出力するヨーレートの信頼性が低いとき、推定走行軌跡出力手段M4は、ヨーレートを用いて第1走行軌跡推定手段M1が推定した車両の将来の走行軌跡を出力せずに、走行軌跡算出手段M2が算出した車両の過去の走行軌跡に基づいて第2走行軌跡推定手段M3が推定した車両の将来の走行軌跡を出力するので、停止した車両が発進する場合においても発進後に出力される将来の走行軌跡を精度を高めることができる。
(もっと読む)
危険車両予測装置
【課題】 より多くの危険事象で警報を報知する危険車両予測装置を提供すること。
【解決手段】 危険車両予測装置は、自車両を基準として、周囲を走行中の他車両の方向及び/又は距離を検出する周囲車両検出部121と、自車両、及び周囲車両検出部121により検出された他車両のそれぞれについて、過去から現在に至る挙動を示す挙動情報を累積する車両挙動累積部125と、車両挙動累積部125で累積された挙動情報のそれぞれに基づいて、周囲車両検出部121で検出された他車両から、近い将来危険を及ぼす可能性があるものを危険車両として予測する危険車両予測部126とを備える。
(もっと読む)
移動体の走行制御装置および移動体
【課題】 後続する移動体に対して追突を回避する走行制御を行うようにして、追突事故を回避あるいは追突の被害を最小限にすることができる移動体の走行制御装置および移動体を提供すること。
【解決手段】 走行制御装置1は、後続する車両との間の距離を測定する車間距離検知手段2と、車間距離検知手段2によって測定された車両間距離の変化に基づいて後続車両との相対速度を判断する相対速度判断手段5と、相対速度に基づいて後続車両に対して追突を回避できる限界距離を算出する追突回避限界距離算出手段6と、車両間距離、車両間の相対速度および追突を回避できる限界距離に基づいて追突回避動作を行うか否かを判断し、後続車両に対して追突を回避するための走行制御を行う追突回避制御手段7とを備える。
(もっと読む)
車両
【課題】 より確実に自車両の存在を他車両や歩行者に報知することにより、衝突等の事故を未然に防止する。
【解決手段】
現在位置と道路情報とから車両の前方に存在する交差点を検出し、レーザ光の照射位置を決定し、車両が30m手前に到達したら、照射位置に人間の目に見えるレーザ光を照射する。レーザ光の照射は、車両の走行位置にかかわらず決定した照射位置を常時照射するように、レーザ光の照射角度を調整する。
決定した照射位置までの間に障害物が存在する場合、車両か人間である場合には照射を中止し(始めから照射しない場合と、照射の途中での中止を含む)、それ以外(ごみ、動物等)である場合には照射位置を障害物を避ける位置に変更して照射する。
(もっと読む)
走行支援装置
【課題】 自車両や他車両のドライバの意思を考慮して的確に情報提供を行う。
【解決手段】 車々間通信により他車両の走行状態、ドライバの操作量等の他車両情報を受信し、他車両が接近車両であり且つ自車両と他車両とが交差すると予測される交差位置までの所要時間Tがしきい値Tα以下であるかを判断する(ステップS1〜ステップS7)。これらを満足するとき、進入しようとしている走行路に接近車両が存在する状態で、自車両のドライバに発進或いは進入の意思があるか、また、接近車両のドライバに接近車両の走行路に進入しようとしている車両が存在する状態でこの進入車両の進入を許容する意思があるかを、進入の意思又は進入を許容する意思の度合に応じて3段階のレベルに設定する(ステップS8、S9)。そして、接近車両及び自車両のドライバの意思のレベルに応じて、情報提供レベルを設定し、これに応じて情報提供を行う(ステップS10、S11)。
(もっと読む)
車両走行状況判定装置
【課題】 運転者の日常的な運転パターンや癖などを検知して安全性の向上に寄与する。
【解決手段】 カーナビゲーション装置1は、位置検出器2と、道路地図データを記憶した地図データ記録媒体7から地図データを制御回路9に入力する地図データ入力器8と、制御回路9と、大容量メモリ15などを備えて構成されている。制御回路9は、現在の車両の走行区域を認識し、この走行区域において入力した車両情報に基づいて運転特性データを作成し、この運転特性データを当該走行区域と関連付けて前記大容量メモリ15に記憶させ、現在の車両情報が当該走行区域対応運転特性データに対して所定の判定基準から外れているときには警告を発する。
(もっと読む)
車両周囲物体検出装置
【課題】本来は1つの物体を表すものとして同一のグループにグルーピングされるべき同一物体からの検出点が正しくグルーピングされなかった場合であっても、物体との位置関係を正確に求めることができる車両周囲の物体を検出する装置を提供する。
【解決手段】自車両前方の物体について、各検出点において位置座標を検出し(ステップS1)、所定の条件を満たす検出点同士をまとめて物体ごとに検出点のグループを作成し、グルーピングを行う(ステップS4)。このグループに含まれていない検出点のうち所定の再グルーピング条件を満たす検出点を物体ごとにまとめる。こうして再グルーピングされた検出点と先のグループ化によってグルーピングされた検出点のそれぞれの位置座標に基づいて、再グループ化後のX座標値を算出する。
(もっと読む)
走行支援装置
【課題】 適切な車線変更が行える走行支援装置を提供すること。
【解決手段】 隣りの車線を走行する二台の車両B、Cの間に割り込んで車線変更するときに車線変更を行う車両Aの運転者の運転操作を支援する走行支援装置であって、二台の車両B、Cの車間が狭いほど車線変更のための操舵速度が遅くなるように操舵支援する。これにより、車線変更後に後続車となる他車Cに対して余裕を持って車線変更を認知させることができ、円滑な車線変更が可能となる。
(もっと読む)
走行支援装置
【課題】 右折する際に、何れかの対向車線の車両に進路を譲る意思があるとき、他の対向車線の車両に対し、進路を譲るよう依頼し、速やかな右折を実現する。
【解決手段】 自車両と他車両との予測される軌道が交差し、交差位置までの到達所要時間がしきい値以下であり、且つ複数の車線に存在する車両と交差する状況にあるとき、つまり、右折等自車両が複数車線を横断しようとしているとき(ステップS1〜ステップS7)、各走行車線の車両の通行意思を推測し、何れかの車両に進路を譲る意思があるとき、他の車両に対し譲歩依頼を送信する。所定時間経過しても譲歩依頼を送信した車両に進路を譲る意思が見られないときには、進路を譲る意思のある車両に対し、通行を辞退する通知を行う(ステップS8〜ステップS11)。
(もっと読む)
立体物監視装置
【課題】簡単な方法で監視すべき立体物を絞り込むことが可能で、その絞込みにより計算負荷を低減することが可能な立体物監視装置および立体物監視方法を提供する。
【解決手段】立体物監視装置1は、立体物までの距離を計測する距離計測手段2と、距離計測手段により得られた立体物までの距離の分布から立体物までの距離データを求め、距離データを複数のグループに分け、各グループ毎に立体物の位置および速度を算出するグループ化手段3と、立体物のパラメータとして、立体物が周囲の立体物に対して相対的に距離計測手段側に突出している度合を数値として算出する突出度合算出手段3とを備える。
(もっと読む)
車間距離制御装置
【課題】降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させること。
【解決手段】自車両の車速を検出する車速センサ20、及び降雨状態(雨滴量)を検出するレインセンサ50が設けられている。レインセンサ50は、雨滴量信号をコンピュータ70に入力する。コンピュータ70は、降雨状態に応じて雨滴量信号が出力されることを利用して、同一の走行状況において、晴天時における目標車間距離より長く、降雨状態に応じて異なる、降雨時における目標車間距離を設定することができる。これにより、降雨状態に応じて、適切な目標車間距離を設定し、当該目標車間距離を維持するように自車両を走行させることができる。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、IPU5による先行車の捕捉とロストが頻繁に繰り返されている場合には、ロストカウンタCt1の作用によって判定用カウンタCt2にカウンタ値を加算し、先行車が継続的に捕捉されている場合、あるいは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt2からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt2を適切に増減させることができ、この判定用カウンタCt2が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
車載用カメラ装置
【課題】
夜間,降雨,霜,高温又は低温等、画像の撮像条件を悪化させる自動車の使用環境条件におけるカメラの画像処理能力(認識力)を高める。
【解決手段】
カメラにより道路上の白線を認識する画像処理カメラ装置において、白線が認識できない場合に、ヘッドライト,ワイパー,熱線,エアコンのいずれかに対して動作信号を送信する構成とすることで、夜間,降雨,霜,高温又は低温等、画像の撮像条件を悪化させる要因を除去する。これによりカメラの画像処理能力(認識力)を高める事ができる。
(もっと読む)
車両の運転支援装置
【課題】ドライバによる感情の変化を検出し、車両の運転特性に反映させて、ドライバによる運転が不安定になることを未然に防止し、車両の安全性を大きく向上させる。
【解決手段】特徴量抽出部4は16個の特徴量(V1〜V16)を抽出し、表情抽出部5は各特徴量(V1〜V16)が予め設定した条件を満足する場合に、怒り、及び、悲しみの表情を抽出する。表情判定部6は表情抽出部5で怒り或いは悲しみの表情が抽出されている場合は制御出力部7に信号出力して、制御出力部7は警報ランプ11を点灯させる。また、制御出力部7は、電子制御スロットル装置8に対し、得られているスロットル開度に対し、1よりも小さな定数を乗算して出力させる。また、制御出力部7は、芳香剤用ファンモータを駆動させて芳香剤を拡散させる。更に、制御出力部7は、オーディオ装置10に信号を出力することで音楽ソフトを自動的に演奏させる。
(もっと読む)
運転支援システム及び運転支援モジュール
【課題】 ナビゲーション装置に見られるように、本来運転支援システムが保持している有用な情報を、運転者の安全運転を喚起すように有用に使用するシステムを得る。
【解決手段】 運転に関連して注意を喚起すべき判定の基礎となる判定情報を取得する判定情報取得手段と、前記判定情報取得手段により取得された判定情報に基づいて注意喚起の要否を判定する判定手段とを備え、
前記判定手段により注意喚起が必要とされた場合に、注意喚起の種類に応じた仮想画像情報を生成する画像情報生成手段を備え、
前記表示手段に、前記画像情報生成手段により生成された仮想画像情報が表示可能に構成する。
(もっと読む)
車両の走行制御装置
【課題】車速制御手段が自車両の車速を所定車速となるように制御する車速制御を行っている場合であって隣接車線が渋滞しているときにおいて、その隣接車線を走行している車両が不意に自車走行車線に割りこんできても、自車両のドライバがアクセルやブレーキやハンドル等を操作することなく、その車両との衝突を回避することができる車両の走行制御装置を提供する。
【解決手段】まず、自車両がオートクルーズモードで走行中であるか否かを判定する。その判定結果がYESであるときは、隣接車線が渋滞しているか否かを判定する。その判定結果がYESであるときは、設定速度を小さくして、自車両の車速が小さくなったその設定速度となるようにスロットルやブレーキのアクチュエータ等を制御する。そのことで、自車両は、小さくなったその設定速度で定速走行するようになる。
(もっと読む)
車両用運転支援システム
【課題】 走行中の車両の運転者に対して、進行方向にある交差点内で車両相互間事故が発生する危険性があることを正確に報知可能にすること。
【解決手段】 車両に搭載された制御部は、進行先の交差点までの到達予想時間を、自車両の現在位置と当該交差点との間の距離、自車両の速度及び加減速度に基づいたリアルタイム演算により逐次算出し(A1)、その到達予想時間を示す時間情報と自車両の現在位置情報などを含む走行情報を、送受信部を通じて送信する(A2)。制御部は、自車両と他車両とが交差点内において直進車両と右折車両との関係にあり、且つ右折車両が走行状態にあったとき(A4:YES、A5:NO)に、自車両の走行情報と、送受信部を通じて受信した他車両の走行情報との比較に基づいて、交差点内で自車両が他車両と衝突する危険性の有無を判断し(A6)、衝突の危険性があると判断した場合に自車両の運転者に向けて危険報知動作を行う(A7)。
(もっと読む)
車両の車線逸脱警報装置
【課題】 車両が走行車線から逸脱すると判定されたときに、該車両の乗員に対し警報を行うようにした車両の車線逸脱警報装置において、車線逸脱警報を行うことに加えて、万一車両が走行車線から逸脱した場合に乗員の安全性を向上させる。
【解決手段】 車線逸脱判定部11にて車両が走行車線から逸脱すると判定されたときに、危険度判定部12にて該車両の走行車線逸脱後の危険度が高いか否かを判定し、危険度が高いと判定されたときには、警報制御部13が、車両の乗員が着用しているシートベルトを巻き取って該シートベルトに所定の張力を付与する巻取り装置8を作動させてシートベルトに所定の張力を付与することで上記乗員に対し警報を行う。
(もっと読む)
2,781 - 2,800 / 2,931
[ Back to top ]