
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,861 - 2,880 / 2,931
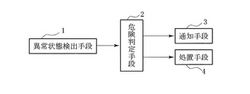
車両用危険通知処置装置
【課題】危険の発生およびその対処方法を乗員に通知するとともに、車両自らが対応処置を実施することにより、乗員が危険を容易に回避できるようにする。
【解決手段】異常状態検出手段1が車両および車両周辺を監視して異常状態を検出すると、危険判定手段2が、検出された異常状態が乗員にとって危険であるかどうかを判定する。危険であると判定された場合には、通知手段3は、車両装備および/または周辺施設を用いて対処方法を乗員に通知し、処置手段4は、車両装備を用いて対応処置を実施する。
(もっと読む)
車両間通信装置

【課題】 他車両に対して適切なタイミングで送信信号を送信する車両間通信装置を提供する。
【解決手段】 車両間通信装置の周囲車両検出部5は自車両の位置を含む所定領域内に存在する他車両を検出する。送信範囲設定部8は、検出された他車両の位置に基づいて送信範囲を設定する。送信制御部11は、設定された送信範囲に到達可能な送信出力強度で送信信号を送信する。
(もっと読む)
踏切事故防止システム
【課題】踏切の通過者に対して踏切内での危険を確実に注意喚起し、踏切事故を未然に防止することができる踏切事故防止システムを提供する。
【解決手段】列車接近警告手段1により踏切Fの通過者C1に対して危険を喚起することができるが、列車検知手段1が列車Tの移動方向αを検知可能なレーダーとなされていることで、踏切Fと逆の方向に進行する列車の検知や、降雨等の影響を排除し、踏切Fの通過者C1に対して踏切F内での危険をより確実に注意喚起して踏切事故を未然に防止することができる。
(もっと読む)
車両制御システム
【課題】 自車両から他車両に搭載された車間距離制御装置を動作させることによって車間距離を確保する車両制御システムを提供する。
【解決手段】 前方車間距離を確保する制御を実行する第1状態と前方車間距離を確保する制御を停止する第2状態とを有する車間距離制御装置1と、車々間通信を実行する車々間通信装置11と、車間距離制御装置1の第1状態と第2状態を選択的に切り替える切替装置3とを備え、切替装置3は、第1状態に切り替える作動信号を生成する作動信号生成部を有し、車々間通信装置11は、作動信号生成部が生成した作動信号が送受信されるよう車々間通信を実行し、他車両に搭載された車間距離制御装置1は、自車両に搭載された切替装置3の作動信号生成部が生成した作動信号に応答して動作状態が第2状態から第1状態に切り替わり、前方車間距離を確保する制御を実行する。
(もっと読む)
通信装置及び通信システム並びに移動ノード間で通信する方法
少なくとも1つのメッセージ(22)(特に少なくとも1つのハローメッセージ及び/又は少なくとも1つの警告メッセージ)をブロードキャストする少なくとも1つの送信ユニット(20)(特に少なくとも1つの送信ブロック)と、少なくとも1つの隣接ノード(12、14、16)によりブロードキャストされる少なくとも1つの到達メッセージ(32、34、36)(特に少なくとも1つのハローメッセージ及び/又は少なくとも1つの警告メッセージ)を検知する少なくとも1つの受信ユニット(30)(特に少なくとも1つの受信ブロック)とを有し、移動ノード(10、12、14、16)間(特に乗物間)で通信を行い、送信条件(例えばトラヒック密度)に従った送信電力の柔軟且つ迅速な調整が保証される方法及び通信装置(100、100’)を提供するために、メッセージ(22)をブロードキャストする送信電力を計算及び/又は選択する少なくとも1つのコントローラユニット(40)(特に少なくとも1つの中継制御ボックス)を提供することが提案される。  (もっと読む)
(もっと読む)
車両の道路適応走行制御装置
【課題】 自車両の進行方向の道路状況を的確に把握し、適切な走行支援を行う。
【解決手段】 道路形状認識部26は、地図データ記憶部14に格納された地図データと、外界監視装置11の検知結果とに基づき、自車両の進行方向の道路形状を認識する。道路状況推定部27は、道路形状認識部26にて認識した道路形状を走行する他車両に対して、対象物走行情報抽出部21にて抽出された走行情報や道路状態および対象物走行軌跡算出部22にて算出された走行軌跡に基づき、自車両が走行予定の道路の道路状況を推定する。走行情報比較部30は、道路状況推定部27にて推定した道路状況を適正に通過可能な適正車両状態(適正速度VS)と自車両の走行状態(現在速度VP)とを比較し、走行支援判定部31は、自車両の走行状態が適正車両状態になるように制動装置16および警報装置17を作動させる。
(もっと読む)
障害物検出装置、車両
【課題】 自車両に対する障害物の位置関係を特定して運転者等に警報を提示する。
【解決手段】 障害物検出装置は、自車両1の周囲の障害物を検出するために、それぞれが異なる箇所に設置され、携帯端末2から発信された無線電波を受信アンテナ1a,1b,1cで受信し、無線電波間の位相差を電波位相比較回路12で算出し、当該位相比較結果から自車両1に対する携帯端末2の位置関係を計算機13で特定すると、特定された自車両1に対する携帯端末2の位置関係に基づいて、自車両1にとって障害物となる携帯端末2を検出して、警報表示部14で報知する。
(もっと読む)
車両の速度制御装置
【課題】 運転者の運転操作の負担が増大することを抑制しつつ、適切な速度制御を実行する。
【解決手段】 車速制御装置16は、自車両が先行車両に追従する追従走行状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して先行車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合等に、距離検知部25にて自車両から先行車両までの距離の検知が不可になると、設定車速判定部29から入力される先行車両の速度と所定の目標速度との比較結果に基づき、自車両速度情報抽出部24にて抽出される自車両の速度が、対象物速度情報抽出部22にて抽出される先行車両の速度または所定の目標速度の何れか小さい方と同等になるようにして速度制御を行う。
(もっと読む)
車両用画像処理システム及び画像処理装置
【課題】 車両の走行状態に応じて、車両前方の視認性が優れた車両用画像処理システム及び該車両用画像処理システムを構成する画像処理装置を提供する。
【解決手段】 画像処理装置3は、ビデオカメラ1、2から画角を受信し、速度センサ5から車両の速度を取得し、取得した速度と、受信した画角に関連付けられた閾値THとを比較する。画像処理装置3は、車両の速度が閾値THよりも小さい場合には、広角レンズを有するビデオカメラ1に対して撮像開始信号を送出するとともに、望遠レンズを有するビデオカメラ2に対してオフ信号を送出し、広角レンズを有するビデオカメラ1からの画像データを受信し、所定の歩行者認識処理を行い、画像処理後の画像データを表示装置4へ出力する。車両の速度が閾値THよりも大きい場合には、望遠レンズを有するビデオカメラ2に対して撮像開始信号を送出する。
(もっと読む)
監視システム
【課題】 監視領域や踏切において人や車両を確実かつ正確に検知し、監視者や運転手に的確に報知する監視システムを提供する。
【解決手段】 監視領域を挟んで一方の側に検出媒体の送信を行う送信手段及び該検出媒体の受信を行う受信手段を配置し、他方の側に検出媒体を反射する反射手段を配置して送信手段から反射手段に向けて検出媒体を常時送信し、受信手段で受信するとともに、受信信号毎にその反射位置を算出し、かつ、反射手段で反射された検出媒体に基づく基準受信信号については、その受信強度のまま、もしくは増幅して出力し、反射手段以外で反射された検出媒体に基づく受信信号については、その受信強度のまま、もしくは減衰させて出力し、基準受信信号が途絶えるか、減衰したときに、監視領域に被検出物体が存在することを検知する。
(もっと読む)
車両の接触回避制御装置
【課題】 自車両と他車両との接触を回避するべく自車両の走行を支援する際に、適切な走行支援を実行する。
【解決手段】 危険性判定部24は、接触回避制御動作の作動状態において、例えばカーブや登坂路の頂上付近等での道路形状に起因して他車両が一時的に外界監視装置11の検知領域から逸脱した場合や、例えば外界監視装置11に異常が発生した場合や、障害物が存在する場合等に、対象物位置・走行軌跡算出部23にて自車両から他車両までの距離の検知が不可になると、対象物走行軌跡算出部21から入力される他車両の走行軌跡と、自車両の走行軌跡とに基づき、他車両の危険度を判定する。
(もっと読む)
車両用画像処理装置
【課題】 悪天候下での車両検知性能を向上させる。
【解決手段】 自車の前方を撮像した画像の一部に画像処理領域を設定し、設定した画像処理領域から画像の特徴を導出するとともに、導出した特徴に基づいて車両の存在を判定する車両用画像処理装置において、撮像画像の中の自車に近い位置から遠い位置へ順に画像処理領域を設定し、自車に近い位置から遠い位置へ行くにしたがって画像処理領域を狭くする。
(もっと読む)
車両用操舵制御装置
【課題】走行路に沿って車両を走行させる操舵アシストトルクを演算するとき、適正な演算を可能にして車両用操舵制御の精度を向上させる。
【解決手段】画像情報に基づいて車両が現在位置する地付近の、走行路の曲率1/R、横ずれ量ydあるいは車両偏向角θhを用いて操舵アシストトルクTLを演算する。即ち、離間した遠い位置の情報ではなく、車両位置付近の精度の高い情報に基づいて得たパラメータに基づいて操舵アシストトルクTLKを算出すると共に、ヨーレートを用いずに操舵アシストトルクTLKを算出する。
(もっと読む)
路面凍結可能性指数算出システム、路面凍結可能性指数算出方法及び路面凍結可能性指数算出プログラム
【課題】 路面がどの程度凍結しやすいのかを表す路面凍結可能性指数を算出すること。
【解決手段】 本発明に係る路面凍結可能性指数算出システム1は、路面温度を取得する路面温度取得部32と、路面に太陽光線が直達する時間を示す可照時間データを取得する可照時間取得部30と、前記路面温度取得部32により取得される路面温度と、前記可照時間データが示す路面に太陽光線が直達する時間と、に基づいて前記路面の凍結可能性を表す路面凍結可能性指数を算出する路面凍結可能性指数算出部36と、を含むことを特徴とする。
(もっと読む)
車間距離制御装置
【課題】車間距離制御中は加速或いは減速指示があると円滑に、且つ、早急に減
速ができる車間距離制御装置を提供する。
【解決手段】運転者の加速要求或いは減速要求に応じて増加或いは減速された設
定速度に自車の速度が一致するように現在の速度を調整し、更に、前車との車間
距離を予め設定した車間距離になるように自車の速度を調整し、車間距離を制御
する車間距離制御手段を備えた車間距離制御装置において、車間距離制御中に加
速要求を検出しても、この要求を無視し、一方、減速要求を検出したときは、設
定速度を減速要求を検出した時点の現在の自車の速度として更新する手段を備え
、更新された設定速度に基いて自車の速度を減速側に調整する。
(もっと読む)
車両追突防護装置
【課題】駐車場に駐車している駐車車両に対する追突および当て逃げから防護することができること。
【解決手段】駐車中の駐車車両1を他車両2の追突から防護する車両追突防護装置20であって、レーダ装置12および撮像装置14は、駐車車両1の駐車領域を含む防護領域の監視をし、他車両対応部2081は、レーダ装置12および撮像装置14による監視結果、例えば、他車両が防護領域に侵入した、駐車車両1に追突すると推定される、または駐車車両1に追突したなどの監視結果に応じて警告、車両制御支援、防護領域情報提供または画像撮影などの対応をする。
(もっと読む)
車両用距離判別装置
【課題】 車両と障害物との距離と目標距離とのずれ量を運転者が視覚により定量的に把握することが容易な車両用の距離判別装置を提供する。
【解決手段】 障害物3に対して所定の投影パターンP1、P2を投影する投影装置21、22が車両1に搭載されている。各投影装置21、22の投影軸A1、A2は、車両1から距離X1離れたC点で交差するように配置されている。そして、距離X1は、投影装置21、22間の距離Y1と略同一に設定されている。このため、障害物3の壁面30に投影された投影パターンP1、P2間の距離Y2は、C点と壁面30との距離X2に略一致する。
(もっと読む)
カメラキャリブレーション方法及びカメラキャリブレーション装置
【課題】カメラの画像座標がレーザレーダの探査座標に確実に整合して障害物の誤認識を確実に防止し得るように、カメラの画像座標を校正する。
【解決手段】自車1の旋回半径から自車1の直進走行状態を検出し、かつ、スキャン式レーザレーダ2の探査結果に基づく自車1と障害物との距離の時間変化及び自車速から障害物が静止状態であることを検出したときに、前記距離と前記自車速とにより自車1と障害物とのレーダ側の衝突予測時間を算出し、単眼カメラ3の撮影画像上の障害物の水平方向の時間変化から自車1と障害物との画像側の衝突予測時間を算出し、両衝突予測時間のずれからレーザレーダ2の探査座標に対する単眼カメラ3の画像座標の水平方向のずれを検出し、このずれが打ち消されて両衝突予測時間が一致するように単眼カメラ3の画像座標を校正する。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
運転者への通知方法および通知装置
手動切替トランスミッションを有する車両の運転者に通知する通知方法と通知装置が提案される。その通知は運転者に、クラッチペダルを操作すべきことを指示し、エンジン回転数がしきい値を下回った場合に出力される。 (もっと読む)
2,861 - 2,880 / 2,931
[ Back to top ]