
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,881 - 2,900 / 2,931
車両用距離判別装置
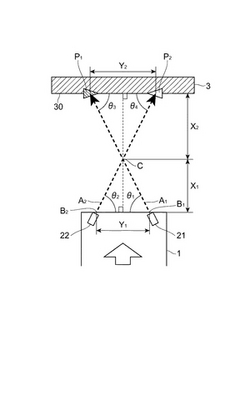
【課題】 車両と障害物との距離と目標距離とのずれ量を運転者が視覚により定量的に把握することが容易な車両用の距離判別装置を提供する。
【解決手段】 障害物3に対して所定の投影パターンP1、P2を投影する投影装置21、22が車両1に搭載されている。各投影装置21、22の投影軸A1、A2は、車両1から距離X1離れたC点で交差するように配置されている。そして、距離X1は、投影装置21、22間の距離Y1と略同一に設定されている。このため、障害物3の壁面30に投影された投影パターンP1、P2間の距離Y2は、C点と壁面30との距離X2に略一致する。
(もっと読む)
カメラキャリブレーション方法及びカメラキャリブレーション装置

【課題】カメラの画像座標がレーザレーダの探査座標に確実に整合して障害物の誤認識を確実に防止し得るように、カメラの画像座標を校正する。
【解決手段】自車1の旋回半径から自車1の直進走行状態を検出し、かつ、スキャン式レーザレーダ2の探査結果に基づく自車1と障害物との距離の時間変化及び自車速から障害物が静止状態であることを検出したときに、前記距離と前記自車速とにより自車1と障害物とのレーダ側の衝突予測時間を算出し、単眼カメラ3の撮影画像上の障害物の水平方向の時間変化から自車1と障害物との画像側の衝突予測時間を算出し、両衝突予測時間のずれからレーザレーダ2の探査座標に対する単眼カメラ3の画像座標の水平方向のずれを検出し、このずれが打ち消されて両衝突予測時間が一致するように単眼カメラ3の画像座標を校正する。
(もっと読む)
中継方式障害物検出システムおよび方法
【課題】 コストを抑えて通信経路網を増やすことにより解像度を高めたり検出範囲を拡大することが可能な障害物検出システムを提供する。
【解決手段】 本障害物検出システムは、親局、1以上の中継子局および受信子局を備える。親局は、中継に使用する第1の子局の1つを指定する第1の局識別情報と送信先である第2の子局を指定する第2の局識別情報とを含むパケットを生成し、搬送波を発生し、中継に使用する第1の子局に向けてパケットを搬送波により送信し、中継に使用する中継子局が少なくともパケットを中継送信する期間は、搬送波の送信を継続する。中継子局は、到来する電波を受信して受信データを獲得し、受信データに含まれる第1の局識別情報が自局宛である場合に限り、親局から受信した信号を中継送信し、中継送信に続いて、パケットに付加する情報を送信する。受信子局の1つと親局との通信が正常に行われたと判断できる場合、その子局と親局との経路には障害物がないと判断する。
(もっと読む)
運転者への通知方法および通知装置
手動切替トランスミッションを有する車両の運転者に通知する通知方法と通知装置が提案される。その通知は運転者に、クラッチペダルを操作すべきことを指示し、エンジン回転数がしきい値を下回った場合に出力される。 (もっと読む)
ナビゲーションシステム
【課題】 交差点の近傍において自車のナビゲーション装置の表示部に表示される無駄な情報を削減して運転者の混乱を抑えることができ、ひいては安全で円滑な運転を行わしめることができる「ナビゲーションシステム」を提供すること。
【解決手段】 ナビゲーション装置8は、対向車線上の対向車両7を検出可能とされた検出手段5が、対向車線上に対向車両7を検出した場合に、監視カメラ3が撮影した画像を表示部15に表示する。
(もっと読む)
車両の衝突を阻止する方法および装置
車両の衝突を阻止するための方法では、まず車両2の周囲状況と車両2の運動量がセンサ2.1,2.2,2.3,2.4,2.5によって検出される。これらのセンサの出力信号から優先交通違反度と衝突危険度が導出される。優先交通違反度と衝突危険度の組合せから危険段階が検出される。それぞれ検出された危険段階に依存して最終的に衝突危険性を低減するためのステップが開始される。 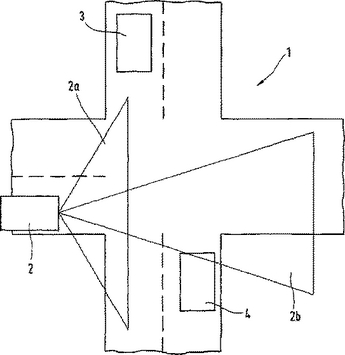 (もっと読む)
(もっと読む)
先行車両水しぶき認識装置
【課題】 前方の車両が水しぶき等を巻き上げて走行していることを確実に認識できる先行車両水しぶき認識装置を提供すること。
【解決手段】 自車の前方の画像を取り込むカメラ4及び画像メモリ2、画像取り込み部31と、画像の輝度分布から減色閾値を設定し、取り込んだ画像を4色の画像に減色する変換処理を行い、減色させた画像の段階的変化から自車前方の車両が水しぶきや、雪煙を巻き上げて走行していることを判断するプロセッサ3を備えた。
(もっと読む)
車両の自動非常制動プロセスを起動する方法及び装置
本発明は、車両の、特に大型輸送車の、自動非常制動プロセスを起動する方法及び装置に関する。これにより、車両が前方走行車両に衝突するのを回避するための、又は衝突が避けられない場合の事故を回避するための、支援機能が提供される。予め定められた警告条件(62)が満たされると、運転者に対する警告が起動される。警告条件(62)が満たされるということは、車両が前方走行車両と衝突するのを防ぐために、予設定された警告時間(tw=toa+th)後の、車両の瞬間運転状況により、自動非常制動プロセスが起動されるということを示している。瞬間運転状況は、少なくとも、車両の検出された加速度(a)、及び/又は車両と前方走行車両との間の、検出された相対加速度(arel)から得られる。  (もっと読む)
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車両と先行車との車間距離の変化を運転者に遅れなくわかりやすく伝える車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて自車両周囲のリスクポテンシャルを算出し、リスクポテンシャルに基づいてアクセルペダルの反力制御指令値を算出する。自車両と先行車との車間距離が増加し始めると反力制御指令値が小さくなるように補正し、車間距離の増加に伴って増加していた相対速度が減少し始めると反力制御指令値が大きくなるように補正する。車間距離が減少するときはアクセルペダル反力の増加により、先行車へ接近していることを遅れなく伝える。
(もっと読む)
移動体とインフラストラクチャの間の相互作用のための運転補助システム
【課題】革新的な運転補助システムであって、特にインフラストラクチャ上または中に堆積された磁化可能な粒子からなる磁気マーキングを含み、この粒子が高価でなく、この帯の中に暗号化されたデータを簡単に再プログラムできるシステム等を提供すること。
【解決手段】インフラストラクチャ10上を走行する車両20へ情報を供給する運転補助システムは、インフラストラクチャの上に形成され、車両宛の情報を暗号化するのに適した磁気マーキングであって、情報が変更可能である磁気マーキング30、40と、車両に搭載され、磁気マーキングによって生成された磁界を含む全磁界を検出し、全磁界に対応する信号を作成する複数の磁気センサ45と、対応する信号を処理し、一方では車両と磁気マーキングとの間の第一の距離を決定し、他方では磁気マーキングに暗号化された情報を解読するように適合された処理ユニット50とを含む検出デバイスと、を備える。
(もっと読む)
車輌用走行制御装置
【課題】追従走行制御に於いて、先行車輌の停止に伴い自車を停止させる際に自車が停止不可区域に停止したり運転者の意思に沿わない位置に停止したりすることを防止する。
【解決手段】先行車輌が停止していない場合(S100)及び先行車輌が停止していても自車が停止するまでの予測時間Taが基準値Taoよりも大きいときには(S140)、車間距離制御が実行され、先行車輌と自車との間の車間距離Lreが目標車間距離Ltに制御されるが(S170)、予測時間Taが基準値Tao以下になると運転者に対し制駆動操作を催促する報知が発せられた状態で車間距離制御が実行され(S150、170)、運転者は自らの判断により制駆動操作を行うことにより自車を所望の位置に停止させることができ(S20、210)、自車が停止不可区域にて停止する虞れがあるときにも報知が発せられる(S80、150)。
(もっと読む)
障害物認識方法及び障害物認識装置
【課題】ミリ波レーダ等の探査結果を利用することなく、撮像装置の自車前方の撮影画像から自車前方の衝突の可能性がある停止中の先行車等の静止状態の障害物を、自車の走行状態による誤認識が生じないようにして、確実に認識する。
【解決手段】自車1に搭載された単眼カメラ(撮像装置)3の自車前方の撮影画像の垂直エッジのヒストグラムを算出し、このヒストグラムのピーク点の軌跡のトラッキング画像を形成し、自車1の旋回半径から自車1の直進走行状態を検出したときに限り、前記ピーク点の軌跡の車幅方向の広がりの時間変化特性から衝突予測時間を算出し、この衝突予測時間に基づいて自車前方の衝突可能性がある静止状態の障害物を認識する。
(もっと読む)
ナビゲーション装置
ガイドのためにガイドオブジェクトが交通路に対して、該ガイドオブジェクトが車両によって行われるべき運転操縦を実施するように表示される、交通路網において車両をガイドするためのナビゲーション装置が提案される。運転者は運転者に示される運転操縦を繰り返し、こうしてその前に計算された走行ルートに従う。 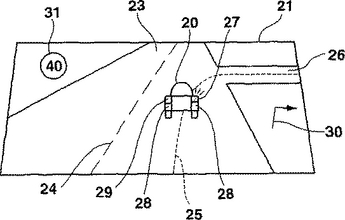 (もっと読む)
(もっと読む)
運転状況判定装置
【課題】 危険状態の程度に応じて運転者にその危険状態を認識させ、危険状態を回避すべき運転操作をより早く行わせること等を実現するため、現在の運転状況をより多様に判定する運転状況判定装置を提供する。
【解決手段】
車両に搭載された運転状況判定装置が、取得した様々な情報に基づき、自車両と衝突可能性のある障害物を認識し、その障害物と自車両との間の相対距離及び相対速度に基づき、判定条件の異なる複数種類の危険判定を行い、自車両がどの領域(危険の程度によって分けられた領域)に属するかを判定する。そして、その判定結果を様々な他装置に出力する。この結果、様々な他装置が独自に情報を収集して動作可否を判断するよりも、運転状況判定装置の判定結果を利用して動作する場合のほうが他装置は効率的かつ協調的に機能し、結果として安全性が高まる。
(もっと読む)
車両用運転操作補助装置および車両用運転操作補助装置を備えた車両
【課題】
自車周囲の状況変化を、必要に応じて運転者にわかりやすく報知する車両用運転操作補助装置を提供する。
【解決手段】
車両用運転操作補助装置は、自車両周囲の障害物状況に基づいて自車両周囲のリスクポテンシャルを算出し、リスクポテンシャルに基づいてアクセルペダルの反力制御指令値を算出する。自車両の前方車両が検出されなくなると、その状況変化を運転者に報知する必要があるかを判定し、報知する必要がある場合にはアクセルペダル反力制御指令値が小さくなるように補正する。アクセルペダル反力により、自車両周囲のリスクポテンシャルを伝達するとともに、先行車が検出されなくなった場合に、必要に応じてアクセルペダル反力を減少して運転者に報知する。
(もっと読む)
通信システム、車両同士および車両間の通信方法、およびこのような通信システムを備える車両
車両(10,12,14,16,18)の少なくとも1個のグループがクラスタ化された少なくとも1個のクラスタ(20,22)内での車両(10,12,14,16,18)の通信のための少なくとも1個のコード(80,82,84,86)を含み、少なくとも1個のメッセージ(30,32,34,36,38)を送信するため設計された、少なくとも1個のチャンネル(90,92)を用いて、同じ領域内で異なる方向へ移動する車両同士および車両間(10,12,14,16,18)の、干渉が取り除かれた、通信のための通信システム(100)およびこの通信システム(100)を備える車両と、車両同士および車両間(10,12,14,16,18)の通信方法とを提供するため、車両(10,12,14,16,18)は、メッセージ(30,32,34,36,38)の送信方向が車両(30,32,34,36,38)の移動方向(M)に関連したいずれかの方向のうちの少なくとも1つの方向、たとえば、前方、後方、および/または、側方に割り付け可能にさせるため、車両(10,12,14,16,18)の移動方向(M)に関連した様々な方向、たとえば、前方、後方、および/または、側方に合わされた少なくとも1個、好ましくは、2個以上の指向性アンテナ(40,42,44,46)を備え、チャンネル(90,92)は、少なくとも1つの方向領域、たとえば、北、東、南、または、西に割り当てられることが提案される。  (もっと読む)
(もっと読む)
車両用右左折支援装置
【課題】 交差点ごとにインフラ整備を行うことなく、車両に搭載したシステムのみにより右折先または左折先横断歩道上の歩行者との接触を防止する。
【解決手段】 撮像手段による撮像画像を処理して右折先の横断歩道を横断する歩行者の存在を検出するとともに、すれ違う対面車両の通過を待っている右折待ちの状態にあるか否かを判定し、車両が右折待ち状態にあると判定され、かつ歩行者が検出されている場合に、運転者の車両を発進させる意志が検出されたときは警告を行う。
(もっと読む)
自動車の安全システム
【課題】 車輛を運転中に、ドライバーなどの搭乗者が巻き込まれる交通事故などの予期せぬトラブルに対して、未然に対処することを可能とする。
【解決手段】 車輛の作動状態および搭乗者の運転状態を検出する車輛状態検出装置1と、車輛状態検出装置1からの信号を受けて内部演算処理によって車輛の作動状態および搭乗者の運転状態を安全な状態に制御するコントローラ2と、コントローラ2からの信号を受けて車輛の作動状態および搭乗者の運転状態を修正して車輛および搭乗者の安全を確保する安全装置3とから自動車の安全システムを構成する。車輛状態検出装置1においてセンサなどの検知器によって少なくとも1以上の危険状態を察知し、コントローラ2により安全装置3において少なくとも1以上のアクチュエータ310,320を作動させる。
(もっと読む)
車両のための操作方法
車両の操作方法に際して、ドライバーの健康状態が検出され、対応する信号が出力される。本発明に係る方法では、いつでも作動可能な装置が車両に備えられ、当該装置を用いてドライバーや他の乗員の身体コンディションが積極的に影響を与えられ得、及び/又は発生するストレスに反対作用し得るものである。 (もっと読む)
状況検出表示システム、状況検出表示方法、状況検出表示システム制御プログラム、および当該プログラムを記録した記録媒体
状況検出表示システム(100)では、全方位カメラ(1)、車内センサ類(3)、車外センサ類(4)などによって自車およびその周囲の状況を検出し、検出した結果を示す画像データであって、自車の画像を含む画像データを画像用DB(6)から選択して、液晶パネル(7)における速度計の表示に近接する位置に表示する。 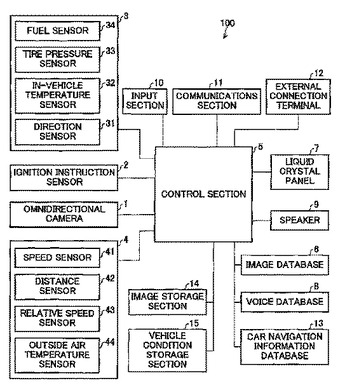 (もっと読む)
(もっと読む)
2,881 - 2,900 / 2,931
[ Back to top ]