
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,841 - 2,860 / 2,931
車載制御装置
【課題】 自車両と後方から接近する車両の走行状況を把握して、その状況に応じて適切な回避策をとることが可能な車載制御装置を提供する。
【解決手段】 車両の速度を検出する車速検出手段と、両の後方を走行する車両を検出する後方車両検出手段と、後方車両との車間距離を演算する車間距離演算手段と、車速および車間距離とに基づいて後方車両の接近速度を演算する接近速度演算手段と、車両の現在位置を検出する位置検出手段と、後方車両に報知を行なう報知手段と、道路種別の情報を含む地図データを記憶する地図データ記憶手段と、道路種別に基づいて定められる速度および接近速度の基準値を記憶する基準値記憶手段と、速度および接近速度が車両の現在位置の道路種別毎に定められる基準値内にあるかどうかを判定する判定手段と、速度および接近速度が基準値を超えたと判定された場合に、報知手段に報知を行なわせる報知制御手段とを有することを特徴とする車載制御装置として提供可能である。
(もっと読む)
車両の認知支援装置

【課題】 自車両に対し相対的に危険度の高い物体の存在を運転者に適切に認識させる。
【解決手段】 合成画像生成部30は、外界センサ12から入力される画像データに拡大画像取得部22から入力される対象物の拡大画像を合成して合成画像を生成する。画像表示制御部31は、少なくとも、視認難易度判定部25にて算出した視認性の難度が所定難度を超えていると判定された場合、または、危険度判定部28にて算出した危険度が所定危険度を超えていると判定された場合には、合成画像生成部30にて生成された合成画像を前方表示装置15または後方表示装置16へ出力する。
(もっと読む)
他車両検出装置
【課題】反射波からその反射波の原因となったものが他車両であるか、あるいは道路構造物といったその他の物体であるかといった区別をすることができる他車両検出装置を提供すること。
【解決手段】自車両から照射した照射波の反射波を用いて他車両の検出を行う他車両検出装置において、反射波が持つ強度のパターンから他車両の有無を判定する他車両判定手段を備えた(ステップS3〜ステップS5)。
(もっと読む)
障害物検出装置及び障害物検出方法
【課題】カメラの撮像方向の変化応じて、時空間画像の検出ラインの位置を補正する。
【解決手段】
車両に搭載され、車両の周囲の所定領域を所定の撮像方向で撮像するカメラ1と、所定領域に予め設定された検出ライン上の画像データの経時的変化に基づいて、車両の周囲の障害物を検出する障害物検出ユニット2とを有し、障害物検出ユニット2は、障害物検出時のカメラ1の撮像方向を取得し、この取得した撮像方向と初期設定時におけるカメラ1の撮像方向とからカメラ1の撮像方向のずれ量を算出し、算出した撮像方向のずれ量に基づいて検出ラインの設定位置を補正する検出ライン補正装置22を有する。
(もっと読む)
接近警報制御方法及び接近警報装置
【目的】 前方車両への接近注意の度合が大きいほど後方車両における接近注意の警告タイミングを早め、あるいは警告頻度を多くする「接近警報制御方法及び接近警報装置」を提供することである。
【構成】 前方車両1に対する接近注意を後方車両2において行なう接近警報制御において、前方車両1において、ユーザ設定情報あるいは車両情報に基づいて接近注意の度合を決定し、車車間通信により決定した接近注意の度合を後方車両2に送信し、後方車両において、前方車両から受信した度合に応じた条件で接近注意の警報を行なう。
(もっと読む)
運転支援情報提供装置および方法
【課題】 対向車表示画面と歩行者表示画面とを提供する際に、運転者に与える混乱を極力小さくし、かつ、表示画面の内容を運転者ができるだけ短い時間で認識することが可能な「運転支援情報提供装置および方法」を提供する。
【解決手段】 車両の停止/進行を検出し、その検出結果に応じて、対向車表示画像と歩行者表示画像とのどちらを主表示画像とするかを決定する主表示画像決定部17と、対向車表示画像と歩行者表示画像とを共に全画面に同時に表示し、その表示の際に、主表示画像でない方の画像の濃度を薄くして表示するように制御する画像合成部18とを備えることにより、両画像の表示サイズを大きくして表示内容を読み取りやすくするとともに、自車両の停止/進行に応じて画像が切り替えられたときでも、切り替わり前に既に薄く表示されている画像を先行手がかりとして切り替わり後の画像を簡単に認識することができるようにする。
(もっと読む)
運転支援装置
【課題】道路情報に基づいて、新しい道路環境に適応するように自車両を走行させ、安全性を向上させること。
【解決手段】車輪の回転速度に対応した信号を検出する車速センサ10、ナビゲーション装置20、及びスロットルバルブの開度を調節するスロットル駆動器40が設けられている。事前登録地点(例えば、制限速度が変更される地点)に自車両が接近した場合、事前登録地点を起点とする道路の制限速度を取得し、自動的に、スロットル駆動器40を用いて、自車両の駆動力を制御することによって、自車両の車速を制限速度まで変更させるようにした。
(もっと読む)
車両の減速制御装置
【課題】車両の前方において車両が走行する可能性がある道路が複数ある場合において、車両が進入する道路の特定ができない場合であっても、適切な減速制御を行なうことが可能な車両の減速制御装置を提供する。
【解決手段】運転者の減速意図が検出されたときに車両の前方の道路を走行するための減速度を車両に付与し得る車両の減速制御装置であって、車両の前方に車両が走行する可能性のある道路402,409が複数あるときに、前記複数の道路のそれぞれに対して必要な減速度を求め(S190)、前記求められた複数の減速度の間の減速度を前記車両に付与する(S210)。前記車両が走行する可能性のある道路の数が所定値N以下である場合(ステップS190−Y)に、前記複数の道路のそれぞれに対して必要な減速度を求め、前記求められた複数の減速度の間の減速度を前記車両に付与する。
(もっと読む)
運転推定装置および方法
【課題】車両の運転滑らかさ度や、自車の前車による影響度を判断する。
【解決手段】運転時の自車と前車との車間距離を取得する車間距離取得手段101と、自車の速度を取得する自車速度取得手段102と、車間距離と自車の速度に基づいて前車の速度の時間に関する2階微分値を算出し、自車の速度に基づいて自車の速度の時間に関する2階微分値を算出する車両情報算出手段104と、前車の速度の時間に関する2階微分値に基づいて、前車の運転滑らかさ度を推定する前車の運転滑らかさ度推定手段105と、自車の速度の時間に関する2階微分値に基づいて、自車の運転滑らかさ度を推定する自車の運転滑らかさ度推定手段106と、前車の運転滑らかさ度と自車の運転滑らかさ度とを時系列で比較して、自車の前車による影響度を推定する前車と自車比較推定手段107と、情報を提示する表示手段108とを有する。
(もっと読む)
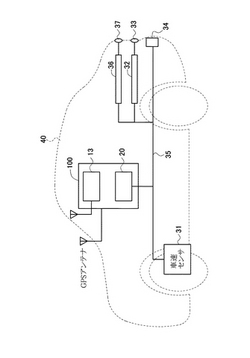
自動駐車システム
【課題】 駐車場内での車両の誘導から空き駐車区画への駐車までの一連の車両走行動作を完全に自動化することにより、空き駐車区画への車両誘導を正確且つ迅速に行うこと。
【解決手段】 駐車管理センタ3は、駐車場入口から進入した車両2に対して、空き駐車区画内の車両停止位置までの車両走行経路(a〜fの何れか)に対応した経緯度情報を含む経路情報を送信する。車両2には、自車両の現在位置を示す測位情報を高精度測位する測位情報検知手段5及び6が搭載されていると共に、それら測位情報により示される車両現在位置と前記経路情報により示される車両走行経路との照合に基づいて車両2を当該車両走行経路に沿って自動操舵走行させると共に、その車両2が空き駐車区画内の車両停止位置に到達したときに自動操舵走行を停止させる走行制御装置が搭載されている。
(もっと読む)
障害物検知装置
【課題】 異常発生を誤って報知する回数を少なくするとともに、速やかに異常発生を報知することができる。
【解決手段】 S200、及びS300における異常判定時間(A、B)は、各々時間長さが異なるように設定される。すなわち、センサ11〜16と最初に(初回に)通信を行う場合の異常判定時間(A)は、初回に通信を行って正常に通信が行われた後に通信を行う場合の異常判定時間(B)よりも短い時間(A<B)となるように設定される。
(もっと読む)
車両の走行制御装置
【課題】
本発明の目的は、ブレーキの制御性の向上した車両の制御装置を提供することにある。
【解決手段】
車両の走行制御システムは、レーダセンサRSと、車両速度コントローラSCと、油圧ポンプ21と、比例ソレノイド弁22と、ブレーキコントローラBCを備えている。車両速度コントローラSCがレーダセンサRSの情報に基づきブレーキを掛ける状況と判断した場合に、ブレーキコントローラBCは車両速度コントローラSCの指令に基づき油圧ポンプ21と比例ソレノイド弁22を動作させ、車輪のブレーキトルクを制御する。
(もっと読む)
車両用表示装置およびその表示方法
【課題】 ドライバに対して圧迫感を感じさせる画像を車両前方の景色に溶け込むように重畳表示する。
【解決手段】 地図情報に基づき、自車が走行している道路において、自車が安全に走行できる走行速度を安全走行速度として算出すると共に、地図情報および自車の状態に基づき、自車が走行するであろう道路における走行速度を予測走行速度として算出する。そして、予測走行速度が安全走行速度よりも速い場合、自車がスピードの出し過ぎであると判定し、道路形状に沿わせて表示する減速促進画像、例えば壁PWを作成する。こうして作成した壁PWを、フロントウィンドシールドWSのヘッドアップディスプレイに表示する。このとき、自車の前方の道路形状に沿わせて壁PWを道路に重畳表示する。
(もっと読む)
先行車追従走行制御装置
【課題】 追従走行モード切り換え時の利便性を向上する。
【解決手段】 設定車速が設定されている場合は、車速が低速領域から高速領域に入ったときに低速追従走行モードから高速追従走行モードへ自動的に移行する。また、低速領域の追従走行モードから高速領域の追従走行モードへのモード切り換え操作履歴が記憶されている場合は、車速が低速領域から高速領域に入ったときに低速領域の追従走行モードから高速領域の追従走行モードへ自動的に移行する。
(もっと読む)
衝突回避通知システム
【課題】車両の周辺を監視し、歩行者と移動体とが衝突する可能性があるときに、歩行者および移動体に衝突回避メッセージを通知する。
【解決手段】歩行者検出手段11が車両10の周辺の歩行者を検出し、歩行者予測進路演算部12が歩行者1の予測進路を演算する。移動体検出手段13が車両10の周辺の移動体を検出し、移動体予測進路演算部14が移動体の予測進路を演算する。衝突予測演算部15が歩行者1の予測進路と移動体の予測進路とに基づいて歩行者と移動体との衝突可能性を演算し、衝突回避メッセージ通知手段16が、衝突可能性がある場合に移動体に対して衝突回避メッセージを通知する。
(もっと読む)
移動障害物検出装置
【課題】ノイズの影響を受けず且つ高精度に移動障害物の存在を検出することのできる移動障害物検出装置を提供する。
【解決手段】自車両前方の映像を撮像するカメラ1と、カメラ1で撮像された画像上に存在するエッジ部分のオプティカルフローを求めるオプティカルフロー算出手段2と、オプティカルフロー算出手段2で求められたオプティカルフローの交点を求めるオプティカルフロー交点算出手段3と、オプティカルフロー交点算出手段3にて求められた、オプティカルフローの交点の分布をヒストグラム化するヒストグラム作成手段4と、ヒストグラム作成手段4で作成されたヒストグラムに基づき、オプティカルフローの交点のピーク位置が存在する場合に、このピーク位置が同一物体によるものか、或いは異なる物体によるものかをt検定を用いて検定するピーク検定手段5とを備える。
(もっと読む)
ブロードキャストチャンネルの使用状況に依存するアドホックネットワークのブロードキャストチャンネルでのメッセージの伝送のスケジューリング
各モバイルノード(10,12,14,16)が少なくとも一つのブロードキャストチャンネル(18)を介して少なくとも1個のメッセージ(24,26)を送信し、少なくとも1台の近接ノード(12,14,16)によってブロードキャストチャンネル(18)を介して送信された少なくとも1個の到着メッセージを受信し、ブロードキャストチャンネル(18)へのアクセスが調整され、帯域分割のある種の公平性が保証され、ネットワーク過負荷が防止された、モバイルノード(10,12,14,16)同士およびモバイルノード間の、特に、車両同士および車両間の通信システム(100)と通信方法とを提供するため、メッセージ(24,26)の伝送が、ブロードキャストチャンネル(18)の使用状況に依存して、特に、ブロードキャストチャンネル(18)の負荷、ブロードキャストチャンネル(18)上のS(信号)/N(雑音)比、および/または、ブロードキャストチャンネル(18)を介して受信されたメッセージ(34,36)の内容および/またはタイプに依存してスケジューリングされることが提案される。  (もっと読む)
(もっと読む)
車載用レーダ
【課題】
車載レーダにおいて、路面・自車・レーダ自身に起因するノイズを低減し、小型軽量かつ低コストでロードクラッタを防止し、検知性能を向上させたレーダ装置を提供する。
【解決手段】
直線偏波を放射する1又は複数の放射素子を有したアンテナと、このアンテナ面の前方に配置された金属板に複数のスリットを設けたスリット板と、アンテナとスリット板の間に発泡材を設けたことを特徴とする。
【効果】
アンテナの給電線路からの交差偏波が主成分となるサイドローブを低減でき、ロードクラッタを防止できる。また、固有振動数が車両の振動数以下となるスリットの共振を低減し、ノイズを抑制することができる。それによって、レーダ装置として優れた検知性能が得られる。
(もっと読む)
車間距離制御装置
【課題】車間距離制御中は加速或いは減速指示があると円滑に、且つ、早急に減
速ができる車間距離制御装置を提供する。
【解決手段】運転者の加速要求或いは減速要求に応じて増加或いは減速された設
定速度に自車の速度が一致するように現在の速度を調整し、更に、前車との車間
距離を予め設定した車間距離になるように自車の速度を調整し、車間距離を制御
する車間距離制御手段を備えた車間距離制御装置において、車間距離制御中に加
速要求を検出しても、この要求を無視し、一方、減速要求を検出したときは、設
定速度を減速要求を検出した時点の現在の自車の速度として更新する手段を備え
、更新された設定速度に基いて自車の速度を減速側に調整する。
(もっと読む)
車両用危険通知処置装置
【課題】危険の発生およびその対処方法を乗員に通知するとともに、車両自らが対応処置を実施することにより、乗員が危険を容易に回避できるようにする。
【解決手段】異常状態検出手段1が車両および車両周辺を監視して異常状態を検出すると、危険判定手段2が、検出された異常状態が乗員にとって危険であるかどうかを判定する。危険であると判定された場合には、通知手段3は、車両装備および/または周辺施設を用いて対処方法を乗員に通知し、処置手段4は、車両装備を用いて対応処置を実施する。
(もっと読む)
2,841 - 2,860 / 2,931
[ Back to top ]