
Fターム[5H180LL04]の内容
Fターム[5H180LL04]に分類される特許
2,901 - 2,920 / 2,931
車両用表示装置、車両、表示方法、画像表示プログラム、および記録媒体
図1(a)に示すスピードメーター11が運転者の正面になるように画面10を配置する。右折指示を検出すると、図1(b)に示すように、ウインカー17を表示させるとともに右後方画像18を画面10の右側に表示する。左折指示を検出すると、図1(c)に示すように、ウインカー19を表示させるとともに左後方画像20を画面10の左側に表示する。左右に応じて異なる位置に表示させるので、直感的把握が容易となり、操作性を向上できる。すなわち、自動車に搭載される表示装置によって、自動車の操作性を確実に向上させる。 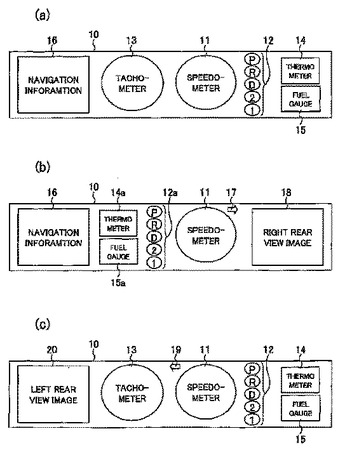 (もっと読む)
(もっと読む)
自動車の間隔制御システム
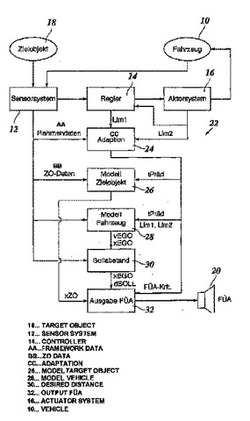
目標対象(18)および自己の車両(10)に関するデータを検出するためのセンサシステム(12)と,車両(10)の縦運動を制御するためのアクターシステム(16)と,目標対象(18)との間隔に関して定められた制御目標を維持するために,所定の介入限界(Lim1,Lim2)内においてアクターシステム(16)へ介入する制御器(14)と,制御目標が維持されない場合に,運転者に引受け要請を出力するための出力装置(20)とを有する,自動車のための間隔制御システムは,制御目標が維持されない対立状況を予測し,対立状況が発生する前に引受け要請(FUA)を作動させるための予測システム(22)を備えることを特徴としている。 (もっと読む)
移動体ノード間の通信を改善する方法
特別無線ネットワークにおいて移動体ノード間の通信を改善する方法を改善するよう、具体的には、送信されるべきデータの量を低減するよう、全てのノードは、アプリケーション特有のクラスタに体系づけられ、夫々のアプリケーションに関連する情報は、クラスタの先頭エレメントに保存される。  (もっと読む)
(もっと読む)
道路曲率推定システム
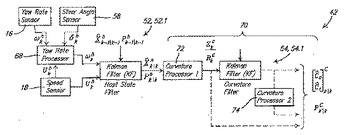
第1のカルマンフィルタ(52、52.1)を使用するプロセッサ(26)が、ホスト車両状態を、速度(U)およびヨーレート(ω)から推定し、この後者は、速度(U)が閾値よりも大きい場合にはヨーレートセンサ(16)からとし、小さい場合には、操舵角センサおよび速度(U)からとすることができる。道路曲率パラメータ(C0、C1)は、ホスト車両軌跡のカーブフィットから、または状態変数が複数のホスト状態変数(72、72)に応答性のある、第2のカルマンフィルタ(54、54.1)から推定される。カルマンフィルタ(52、52.1、54、54.1)には、適応スライドウィンドを組み入れることができる。最も可能性の高い道路種類の曲率は、異なる道路種類のモデルを使用する相互作用多重モデル(IMM)アルゴリズムによって推定される。道路曲率融合サブシステム(96)は、ホスト車両状態、車両位置(86)に応答性のあるマップデータベース(88)、またはレーダーシステム(14)によるターゲット車両(36)の計測値のいずれかを使用する、複数の道路曲率推定器(42.1、42.2、42.N)からの道路曲率推定値を融合させる。
 (もっと読む)
(もっと読む)
自動車の運転者に警告する方法および装置

車両の運転者に,高まった衝突リスクを有する交通状況が存在することを警告する方法と装置が提案される。そのために評価装置に,検出された対象の移動量を表す,少なくとも1つの対象検出器の信号と,少なくとも1つの自己の運動センサ技術の信号が供給可能である。計算装置が,すべての検出された対象と自己の車両について予め定められた期間のために,最大の加速値ないし減速値および最大の時間的加速変化値ないし減速変化値を考慮して,移動軌線を予め計算し,衝突が迫っていることが認識された場合に,運転者に,衝突を回避するためには,より高い加速値ないし減速値および/または加速変化値ないし減速変化値が必要であるという警告を出力する。 (もっと読む)
追突防止装置
【課題】前車との追突の可能性が高い危険状態を検知した場合、すぐにブレーキを動作させ追突の可能性を抑制できる追突防止装置を提供すること。
【解決手段】本発明に係る追突防止装置は、パニックブレーキを検知する検知手段と、前記パニックブレーキ検知手段がパニックブレーキであることを検知した場合に、LEDを用いてパニックブレーキ信号を送信するパニックブレーキ信号の送信手段と、前記信号の受信してブレーキを制御するパニックブレーキ信号の受信手段とを備えることによって、人間が前車両との危険を察知してブレーキを踏むよりも早く、確実にブレーキを動作させることができ、効果的に追突事故を抑制することができる。
(もっと読む)
自動車の運転者への警告方法および警告装置
自動車の運転者への警告方法および装置が提案され,この場合,対象検出器が設けられて,前を走行する車両を検出して,自己の車両に対する間隔と相対速度を求めて評価装置へ供給する。評価装置(1)は,前を走行する車両(13)が減速(a1<0)を実施すると仮定して,さらに対象検出器によって検出された変量と運転者の反応時間および自己の最大可能な車両減速にしたがって,前を走行する車両との衝突が回避できるかを求める。衝突が回避できないことが認識された場合に,運転者警告装置が活性化される。 (もっと読む)
ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法
本願では、ステレオ検出器を使用して乗員および頭部ポーズを検出するためのシステムおよび方法を開示する。訓練ステージにおいて、ステレオカメラの対から同時に取り込まれたイメージの対が受信され、イメージの各対内の構成要素が識別される。各構成要素に対してフィーチャが関連づけられ、各フィーチャに対して値が関連づけられる。これらのフィーチャの中から、最も良好な判別能力を有するフィーチャのサブセットが選択され、イメージの対内の所与の構成要素に対して強いクラシファイアを形成する。検出ステージでは、入力されたイメージ対においてこの強いクラシファイアを使用して、構成要素が検出される。識別された構成要素は、乗員および該乗員の頭部ポーズを検出するために使用される。ステレオ検出がステレオマッチングと体系的に組み合わされることにより、乗員の検出および位置決定が改善される。  (もっと読む)
(もっと読む)
車線装置、選択装置、及び車両の車線判定方法
本発明は、車線装置(30)、車両(10)の車線を判定する方法、及び車線装置(30)と相互作用する選択装置に関する。車線装置(30)は、少なくとも1つの距離センサ(58、59、65)の距離データ(60、61、66)を評価するための評価手段(32、35、37)を含み、該距離センサによって、距離データ(60、61、66)から、少なくとも部分的に、車線の横に基本的に連続して延びる参照物体(62、64)からの側方距離(d1−d4)を決定することが可能である。評価手段(32、35、37)は、距離データ(60、61、66)を基に車線データ(36)を決定するよう構成されている。本発明によると、さらに評価手段(32、35、37)は、特に車線付近に存在する車両(17)又は参照物体(62、64)の不連続性(63)によってもたらされる、誤った情報を、距離データ(60、61、66)から、除去するように構成されている。  (もっと読む)
(もっと読む)
自動二輪車用の走行情報表示方法および走行情報表示システム
【課題】 バンク角等の走行条件を容易に把握することができる自動二輪車用の走行情報表示方法を提供する。
【解決手段】 自動二輪車のバンク角を取得する工程(S10)と、バンク角(152,154)を自動二輪車の走行コース150に沿って表示する工程(S20)とを包含する自動二輪車用の走行情報表示方法であり、工程(S20)において、バンク角(152,154)の度合いは、走行コース150から外れる度合いによって表示されることを特徴とする。
(もっと読む)
自動二輪車用の走行支援方法および走行支援システム
【課題】 技量のあるライダーでもそうでないライダーであっても、適切な走行支援を実行できる自動二輪車用の走行支援方法を提供する。
【解決手段】 自動二輪車の走行情報を利用して走行を支援する方法であって、自動二輪車が所定のカーブを走行する際に(S10)、カーブの走行条件をライダーに通知する工程(S20)を包含し、前記カーブの走行条件として、予め記録しておいた走行情報に基づき算出され、ライダーの技量レベルに対応して変更可能な走行適正値と、実際の走行状態の値との対比結果が前記ライダーに通知される、自動二輪車用の走行支援方法である。
(もっと読む)
車両用の車線変更運転認識方法及び装置
本発明は、車両用の車線変更運転検知方法及び装置に関する。別の観測対象車両(15)の車線変更挙動を記述する少なくとも1つの観測変数が決定される。対象車両(15)がその対象車両(15)に関わる車線から車線変更しようとする意図を特徴づける車線変更変数(CV)が、前記少なくとも1つの観測変数に従って決定される。 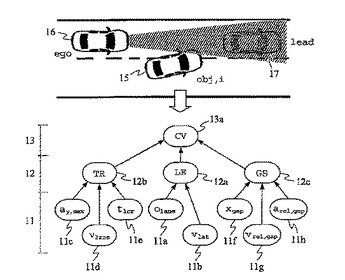 (もっと読む)
(もっと読む)
検出装置の検出領域で障害物を検出する方法
この発明は、障害物の存在する空間をモニタするための方法および装置に関する。このモニタ装置は、通常、少なくとも1つの送信装置と第1および第2の受信装置を有する。この発明の目的は、情報の信頼性を改善する方法および装置を提供することである。この目的のために、第1受信装置よりも送信装置からより離隔している第2受信装置の信号が、その寄生信号部分のために評価される。第1および第2受信装置間の距離があまりに大きくなければ、この第2受信信号に検知される寄生信号部分が、第1信号にも含まれていると仮定することができる。この場合に、望ましいことは、その空間をモニタすることを中止すること、あるいは、少なくとも寄生信号部分が第2受信信号の繰返し評価において検知されない間に既に得られたこの検知のいかなる結果をも破棄することである。 (もっと読む)
低照度の深度に適応可能なコンピュータ視覚を用いた移動物体検出
移動物体検出は距離又は深度情報を含む低照度画像に基づいている。視覚システムは、並進運動が支配的で少量の回転運動を伴うプラットフォーム上で動作する。運動が背景の移動と一致しない移動物体の検出は、形状に基づいたアプローチを補足する。低照度でのコンピュータに基づいた視覚支援では、同時およびその次のフレームブロブの対応を求めるために二段階技術が用いられる。平均風景視差を用いることにより、陽にエゴモーションを計算することなく、運動が検出される。これらの技術は、熱放射物体がホットスポットとして現れる赤外感光ビデオデータの特性を利用する。 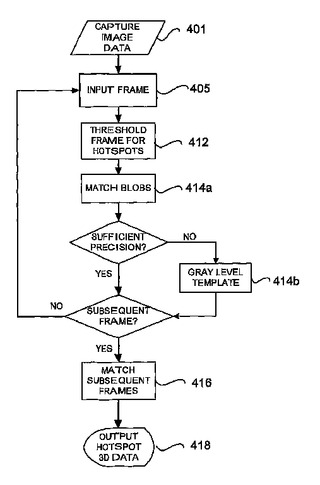 (もっと読む)
(もっと読む)
路上における自動車の位置決定方法及び装置
本発明は路上(3)における自動車(2)の位置(1)決定方法に関する。このために、道路の幾何学的データ(4)及び行路データ(5)が記録され、自動車(2)の道路(3)に対する第1位置データ(1)が、記録された道路の幾何学的データ(4)及び行路データ(5)から算出される。本発明の特徴は、道路のコースデータ(6)が、これも又道路の幾何学的データ(4)と行路データ(5)とから算出されること、第1車両(2)に追随する車両(2’)のこの車両(2)に対する第2位置データ(7)が記録されること、及び、後続車両(2’)の道路(3)に対する第3位置データ(8)が、道路のコースデータ(6)と、車両(2)の第1位置データ(1)と、後続車両(2’)の第2位置データ(7)とから算出されること、にある。 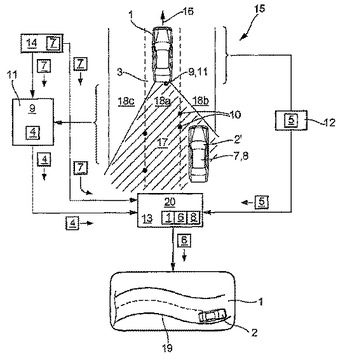 (もっと読む)
(もっと読む)
意図的でない車線逸脱の検出
車両の意図的でない車線逸脱を自動的に検出するための方法および装置を説明する。車輪逸脱警報装置は、車線逸脱認識ユニット(10)、警報生成ユニット(12)、および運転手活動監視ユニット(14)を備える。運転手活動監視ユニット(14)は、運転手の制御介入に応じて連続的に変化する舵取り角などの1つ以上の車両関係パラメータを監視するよう形成される。実際のまたは間近に迫った車線逸脱が検出されかつ運転手の活動が低いまたは活動的でないことを1つ以上のパラメータの評価が示す場合は、警報生成ユニット(12)は警報を生成する。  (もっと読む)
(もっと読む)
緊急制動プロセス中に車両の運転者を支援する方法及び装置
本発明は、車両が、その走行方向の前方の検出領域内に位置する物体、特に先行車両との衝突を防止するために、緊急制動中に車両の運転者を支援する方法及び装置に関する。本発明の方法によれば、所定の緊急制動条件が満たされた場合に、また運転者が緊急制動プロセスを行おうとしていることが検出された場合に、車両(50)を減速するために設けられる制動手段が、運転者とは独立して起動され、緊急制動条件が満たされた場合に、緊急制動情報が車両(50)の運転者に伝達される。本発明によれば、緊急制動条件が満たされないときでも、検出領域(54)における現在の周囲状況又は交通状況に関する情報を車両(50)の運転者に通知する情報が伝達され、予め規定された情報条件が満たされた場合に、運転者への前記情報が調整される。  (もっと読む)
(もっと読む)
立体視に基づく差し迫った衝突の検知
場面の奥行きマップを生成するため処理される画像を生成する立体カメラを有する立体視に基づく衝突回避システム。潜在的な脅威を、奥行きマップにおいて検知する。そして、検知した潜在的な脅威の大きさ、位置、および速度を推定し、推定した位置および推定した速度を用いて、検知した潜在的な脅威の軌道解析を決定する。軌道解析に基づく衝突予測を決定し、衝突が差し迫ったものであるかどうかを、衝突予測および推定された潜在的な脅威の大きさに基づいて決定する。 (もっと読む)
運転者の行動解釈に基づいて自動車のサブシステムを制御する方法および機構
本発明は、自動車の運転のためのタスクに対する運転者の不注意レベルの検出に依存する、自動車のサブシステムを制御するシステムおよび方法に関する。可変特性は、運転者の不注意と相関し、実質的に実時間に基づいて、測定される。不注意のレベルは、少なくとも部分的に、測定に基づいて評価される。クルーズコントロールや車線維持支援のような自動車のサブシステムの動作は、それに基づいて、前記自動車の動作が運転者の現在の不注意レベルに適切に合致することを保証するように、調整される。前記サブシステムの動作は、運転者の不注意レベルが増加すると本質的に危険性を増す走行条件が確立されることを防ぎまたは回避するように制御される。 (もっと読む)
カーブ半径推定装置
【課題】自車両がこれから走行しようとする道路のカーブ半径を推定するために自車両の実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減する。
【解決手段】自車両の実車速Vnと実ヨーレートYawと実操舵角STRとに基づいて、自車両がこれから走行すべき道路のカーブ半径Ryawを推定する(S701ないしS703およびS708ないしS715)。したがって、自車両の過渡状態において実ヨーレートより正確に自車両の旋回挙動を反映し得る実操舵角を考慮しつつ、実ヨーレートを用いてカーブ半径を推定することが可能となり、よって、カーブ半径を推定するために実ヨーレートを用いるにもかかわらず、実ヨーレートの応答遅れに起因したカーブ半径の推定誤差を縮減することが容易となる。
(もっと読む)
2,901 - 2,920 / 2,931
[ Back to top ]