
Fターム[5H301GG11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動距離検出手段 (483)
Fターム[5H301GG11]の下位に属するFターム
走行用車輪の回転数を利用したもの (333)
Fターム[5H301GG11]に分類される特許
21 - 40 / 150
物品搬送設備

【課題】移動体同士の衝突を防止しながら、移動体を合流部に合流走行させることができる物品搬送設備の提供。
【解決手段】第1合流経路27、第2合流経路28、及び、合流後経路29の夫々には、個別に通信用中継装置26が設けられ、通信用中継装置26の夫々は、シート状アンテナにて構成されたアンテナ部30と、アンテナ部30を用いて移動体側の通信装置25との間での通信により取得した移動体情報とその移動体情報をどの経路に配設されたアンテナ部30により取得したかを示す識別情報とを関連付けて管理手段24との間で通信自在な中継装置本体33とを備え、管理手段24は、中継装置本体33から受信した移動体情報と識別情報とに基づいて、どの経路に移動体3が存在するのかを判別して、複数の移動体3の運行を管理する。
(もっと読む)
走行車の走行制御システムと制御方法

【課題】 走行車システムのスループットを増す。
【構成】 地上コントローラと走行車とを通信システム及び地上を介して接続する。地上コントローラから走行車に位置の制御周期毎に位置指令を与え、走行車は制御周期内で複数の速度指令とトルク指令とを自ら発生させて、位置指令を達成する。
(もっと読む)
走行車システム
【構成】 走行経路に走行車の減速度が異なる複数の区間を設ける。走行車は、走行車の走行速度と、複数の区間の減速度中で最大の減速度と、機体長パラメータとを用いて、干渉回避距離を演算する。また区間の減速度が最大の減速度よりも小さい区間で、機体長パラメータを、最大の減速度の区間よりも長くする。
【効果】 簡単な制御で、走行車の減速と再加速の繰り返しを回避でき、さらに走行車間の干渉も回避できる。
(もっと読む)
搬送車システム
【課題】操作者の安全を確保しつつ、システムを停止することなく搬送車を手動操作可能にする搬送車システムを提供する。
【解決手段】搬送車システムは、操作端末45と、通信装置43と、搬送車3とを備えている。操作端末45は、手動操作が可能である。通信装置43は、操作端末45により操作可能である。搬送車3は、通信装置43とは別体であり、通信装置43を介して操作端末45と通信が可能な無線通信処理部と、操作端末45と直接通信が可能な有線通信処理部とを有する。
(もっと読む)
自律型移動体
【課題】移動障害物のゴーストを適時に除去することにより、効率的な移動を行うことができるようにする。
【解決手段】移動領域内の測距データを取得するための測距装置31により取得した測距データに基づき、自律移動の妨げとなる障害物が移動障害物であるか否かを判定する障害物判定手段30aと、判定に係る移動障害物を含む三次元地図を作成する地図作成手段20aと、判定に係る移動障害物に対応する三次元地図上の座標位置をマーキングするマーキング手段30bと、所定の時間経過毎に、当該マーキングした三次元地図上の座標位置から当該移動障害物を消去する移動障害物消去手段20bと、移動障害物を消去した後の三次元地図に基づいて、経路計画を作成する経路計画作成手段20cと、その作成した経路計画に従い、駆動機構を介して移動領域内を移動するための移動手段10aとを有している。
(もっと読む)
搬送システム及び衝突防止システム
【課題】例えば半導体装置製造用の各種基板を収容するFOUP等の被搬送物を搬送する搬送システムにおいて、搬送車における走行方向の前方に在る障害物の監視を容易に行う。
【解決手段】搬送システム(100)は、軌道(2)に沿って走行する搬送車(3)と、搬送車における走行方向の前方を撮像し、該前方に係る距離画像を出力する距離画像出力手段(10)と、出力された距離画像に基づいて、搬送車が前方に在る障害物に衝突する可能性を解析する距離画像解析手段(23)と、解析された可能性に応じて、搬送車の走行を制御する走行制御手段(4)とを備える。
(もっと読む)
経路探索装置、経路探索方法、及び経路探索プログラム
【課題】移動体が障害物を回避して移動可能な移動経路を容易に探索すると共に、その経路長、及び経路上の任意地の点までの到着予想時刻を容易に計算可能な移動経路を探索すること。
【解決手段】本発明に係る経路探索装置は、移動領域内に存在する障害物を中心として移動禁止領域を設定し、当該設定した移動禁止領域の外周の形状を、自律移動体10の移動速度に基づいて設定した所定の曲率を有する図形を用いて生成する探索空間生成部20と、移動禁止領域の接線と移動禁止領域の外周とを接続してなる経路候補から、自律移動体10の移動速度に基づいて経路探索を行い、当該経路探索の結果、自律移動体10が移動禁止領域の外周上を通過する場合には、移動経路のうち、移動禁止領域の外周を除く移動経路部分を接線とし、移動禁止領域の外周上の移動経路部分を図形に従う移動経路とする経路探索部21とを有する。
(もっと読む)
移動体遠隔制御システム
【課題】 走行中の移動体の現在位置を精度良く制御できると共に、移動体の位置がGPS電波の受信可能な地域や基準局との送信可能な地域に制限されることなく、リアルタイム性が良好であって低コスト化が実現でき、実用性の良好な移動体遠隔制御システムを提供することを目的とする。
【解決手段】 移動体の移動動作を遠隔から駆動制御する移動体遠隔制御システムにおいて、移動体とは離間して所定の位置に配置され、第1カメラ及び第2カメラを介して移動体をステレオ撮影して移動体の三次元座標を検出するカメラ制御装置100と、検出された移動体の三次元座標を予め設定されて経路データ記憶部16に記憶された移動経路と比較し、移動体が移動経路に沿って移動するように、移動体の移動動作を駆動制御する第1運転制御部12と、を備える。
(もっと読む)
無人搬送車の経路の補正システム
【課題】 自律走行する無人搬送車の経路を絶対位置情報やマップデータを使用せずに補正できるようにする。
【解決手段】 基準となる基準無線タグ23と前記基準無線タグ23からの相対的な位置情報を記憶した複数の無線タグとを、前記基準無線タグ23を中心として直線状に無線タグ間を等間隔に並べた無線タグ群12を前記基準無線タグ23が指示経路11上になるように前記指示経路11に対して法線方向に予め走行面に施設し、無人搬送車1が前記無線タグ群12を通過する際に前記無線タグ群12の無線タグから記憶されている情報を読み取り、計算装置6で前記情報に基づいて前記指示経路からのずれ量を計算して、前記ずれ量に基づいて走行装置4に指令する。
(もっと読む)
自律移動装置
【課題】領域の塗り潰しを行う自律移動装置において、走行領域の形状に柔軟に対応して自然な移動で効率的に走行領域を塗り潰し可能とする。
【解決手段】自律移動装置の経路生成手段は、走行領域2を規定する2つの境界縁3と走行領域2における4つの領域定義点P0〜P3による2つの線分4とで囲まれた閉領域20が指定されると、閉領域20を所定の掃引幅Wで走行して塗り潰すために、線分4に沿って、既定の仮目的地P0〜P3に加え追加の仮目的地a,b(総称してK)を設定し、各仮目的地Kを経由するように経路Rを生成する。閉領域20は、当該閉領域の境界に位置する複数の領域定義点P0等によって走行領域2に柔軟に設定でき、領域定義点P0等を結んで成る線分と、状況に応じて援用される境界縁3とで囲まれた領域として定義される。自律移動装置は、仮目的地Kの位置を認識しつつ安定に塗り潰し移動できる。
(もっと読む)
物品搬送装置
【課題】反射体のコンパクト化を図りながら、走行体の走行位置を検出しながら走行体を移動させることができる物品搬送装置の提供。
【解決手段】投受光手段21は、反射体22の中央部に向けて測距用光を投光するように構成され、走行経路に直交する方向において投受光手段21と異なる位置に配設され、且つ、投受光手段21にて投光する測距用光と平行になるように反射体22に向けて光を投光して反射体22にて反射された光を受光する補正用投受光手段23が設けられ、補正用投受光手段23にて反射体22にて反射された光を受光していないと判別すると、測距用投光方向及び補正用投光方向を走行経路に直交する方向での投受光手段21と補正用投受光手段23との並び方向において補正用投受光手段23が位置する側とは反対側に変更すべく、投光方向変更手段の作動を制御する投光方向変更制御手段が設けられている。
(もっと読む)
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器などの被搬送物を、カーブを有する軌道上で搬送する搬送システムにおいて、障害物の衝突を防止しつつ、安定的に搬送する。
【解決手段】搬送システム(100)は、軌道(1)と、軌道に沿って走行すると共に、被搬送物を搬送する搬送手段(3)と、搬送手段に夫々取り付けられており、搬送手段の走行時に搬送手段及び被搬送物の少なくとも一部が接触する可能性のある障害物を、相異なる領域を検知領域として夫々検知可能な複数のセンサ(4)と、搬送手段の走行位置に応じて、複数のセンサのうち障害物の検知に使用される少なくとも一のセンサを選択する選択手段(6)とを備える。
(もっと読む)
移動体の制御システム、制御装置、及び移動体
【課題】移動経路の変更の自由度を確保しつつ、目的地まで移動体を自律的に移動させること。
【解決手段】複数のRFIDタグ50の配列によって形成される経路上を移動するロボット200と、ロボット200の経路上の移動方向又は移動量を制御するコントローラ100と、を備え、ロボット200は、経路上の移動時に複数のRFIDタグ50夫々から取得するRFIDタグ50同士を識別させる識別値をコントローラ100に送信し、コントローラ100は、ロボット200からの識別値の受信に応じて、識別値に対して予め設定されたロボット200を目的地まで移動させるための走行データをロボット200に送信する。移動経路の変更に応じて走行データの内容を変更することで、移動経路の変更に対応しつつ目的地までロボット200を自律的に移動させることができる。
(もっと読む)
移動体システム
【課題】走行ルートに対する移動体の座標を既存のセンサで求めることにより、各ゾーンに複数台の移動体を走行させることができるようにする。
【解決手段】走行ルートに沿ってリニアモータの1次側コイルを配列すると共に、移動体にリニアモータの2次側を設ける。走行ルートを複数のゾーンに分割して、各ゾーンのゾーンコントローラによりゾーン内のリニアモータのコイルを制御する。コイルのリニアスケールからのリニアスケールを基準とする移動体の座標を、走行ルートを基準とする座標に変換する。
【効果】移動体の位置を走行ルートを基準に表現すると、移動体間の距離を求めることができ、1ゾーンに複数台の移動体を走行させることができる。
(もっと読む)
配膳車
【課題】保温庫を備えた自走式の配膳車において、配膳車に異常が発生した場合に、サービスセンター又はサービスマンの通信端末装置に異常発生及び配膳車の現在位置を通報し、サービスマンが現場に到着するまでに要する時間を短くする。
【解決手段】保温庫3の保温状態又は移動装置2による走行状態に異常が生じたことを検出する異常検出装置4と、あらかじめ登録されているサービスセンター及び/又はサービスマンの通信端末装置10との間で双方向通信が可能であり、異常検出装置4により異常が発生したと判断されたときに、異常が発生したこと及び現在位置情報を通信端末装置10に送信するとともに、通信端末装置10から送信された信号を受信する無線通信装置5と、無線通信装置5が受信した信号に応じて、保温庫3又は移動装置2を制御する異常状態回復装置6を備える。
(もっと読む)
座標補正方法、座標補正プログラム、及び自律移動ロボット
【課題】2つの環境地図の間の姿勢ずれを補正することで、一方の環境地図上の点を他方の環境地図の座標系に合わせて座標変換する処理を、自動的に、かつ少ない計算量で行なうことを可能とする。
【解決手段】(a)一方の環境地図の座標系を並進又は回転させることにより、一方の環境地図の姿勢を変動させ、(b)一方の環境地図に含まれる移動不可能な領域である複数の障害物セルの各々について、姿勢変動後の一方の環境地図の各障害物セルから、他方の環境地図における最寄りの障害物セルまでの距離を求める。(c)複数の障害物セルについて算出した最寄りの障害物セルまでの距離の合計値を目的関数として最適化計算を行い、目的関数が最適化される一方の環境地図の姿勢を決定する。(d)最適化計算により得られた一方の環境地図の姿勢に基づいて、2つの環境地図のうちの一方の地図上の座標を、他方の地図上の座標に座標変換する。
(もっと読む)
位置特定装置および動作指示装置並びに自走式ロボット
【課題】被搬送物等の指示対象物または搬送先等の指示対象位置の位置を特定する際の精度を向上させることができる位置特定装置および動作指示装置並びに自走式ロボットを提供することを目的とする。
【解決手段】複数の対象物の画像から算出した特徴量と位置情報とを関連付けて記憶する記憶部と、指示対象物の画像を取得する画像取得部と、該画像取得部により取得された前記指示対象物の画像から算出した特徴量と前記記憶部に記憶された複数の前記対象物の画像から算出した特徴量との比較を行う比較部と、該比較部による比較結果に基づいて前記指示対象物を特定する指示対象物特定部と、該指示対象物特定部により特定された前記指示対象物に対応する前記対象物の位置情報を、前記指示対象物の位置情報として前記記憶部より抽出する位置情報抽出部とを備える位置特定装置を採用する。
(もっと読む)
移動ロボット及び移動ロボットの危険範囲の表示方法
【課題】移動ロボットの動作内容の変化に伴って変動する危険範囲を人に視覚的に認識させる。
【解決手段】移動ロボット1は、移動ロボット1の動作を制御する動作制御手段(動作計画部100及び動作制御部101)と、移動ロボット1の動作に伴って移動ロボット1の周囲に生じる危険範囲60の形状を、動作制御手段の制御に基づく移動ロボット1の動作内容の変更に応じて変化させながら視覚的に表示する表示手段(表示制御部106及びプロジェクタ107)を有する。
(もっと読む)
飼料移動のための無人走行車両
地面に置かれた飼料(3)を水平に移動させるための無人走行車輌(1)は、別々の駆動手段により別々に駆動される二つの車輪と、その車輌から壁部への距離を測定する距離測定手段(6)と、その壁部に対する車輌の中心線の向きを測定する向き測定手段(9)と、車輪間のトルク差を測定するトルク差測定手段(10)と、その車輌を走行方向に移動するよう制御する制御装置(11)と飼料(3)を水平に移動させる飼料移動手段と、を備え、前記制御装置(11)が、動作中に前記距離測定手段(6)により測定された壁部までの距離を、初期設定の最小距離以上に維持するようプログラムされ、さらに、飼料移動手段の最下点(19)の高さと又は位置を調整する調整装置を備えている。 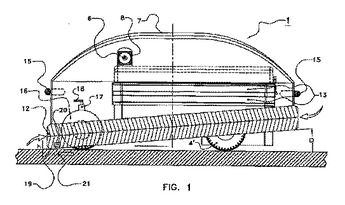 (もっと読む)
(もっと読む)
ロボット位置検出システム
【課題】 遠隔操作するロボットの位置および方向をディスプレイ上で確認でき、必要に応じてロボットの表示位置および方向を修正できるようにする。
【解決手段】
ロボット10は、走行体11と、走行体11に回動可能に搭載されたビデオカメラ12と、モータエンコーダ15と、角速度センサ16とを有している。遠隔制御装置20のディスプレイ22は、ビデオカメラ12からの映像を表示し、かつ障害物のマップを表示し、ロボット10の位置および方向を示すマークをリアルタイムで表示する。ロボット10の位置および方向は、モータエンコーダ15と、角速度センサ16の情報に基づいて積分演算を行うことにより得る。このロボットの表示位置および方向は、修正することができる。
(もっと読む)
21 - 40 / 150
[ Back to top ]