
Fターム[5H301GG11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体上に設けられた検出手段 (3,259) | 移動体の移動距離検出手段 (483)
Fターム[5H301GG11]の下位に属するFターム
走行用車輪の回転数を利用したもの (333)
Fターム[5H301GG11]に分類される特許
41 - 60 / 150
充電制御装置、充電制御システム及びそれらに用いる充電制御方法並びにそのプログラム
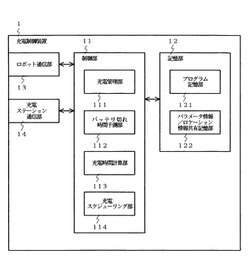
【課題】 自律型駆動装置がバッテリ切れで動作不能となることを事前に防ぎ、充電ステーションでの充電作業をスムーズに行うことが可能な充電制御装置を提供する。
【解決手段】 充電制御装置(1)は、自律型駆動装置のバッテリ状況及び消費電力を管理する管理手段(充電管理部111)と、自律型駆動装置におけるバッテリ切れを起こす時期を事前予測する予測手段(バッテリ切れ時間予測部112)と、管理手段で管理する情報及び予測手段の予測結果を基に充電ステーションにおける自律型駆動装置のバッテリへの充電のスケジュールを作成する作成手段(充電スケジューリング部114)と、作成手段で作成されたスケジュールを自律型駆動装置及び充電ステーションに通知する手段(ロボット通信部13及び充電ステーション通信部14)とを有する。
(もっと読む)
障害認識装置及びこれを有する自律走行移動体並びにその制御方法

【課題】安価で且つシンプルな構造であり、自律走行移動体の走行路における障害の有無を確実に認識することができ、安定した自律走行を行わせることが可能である障害認識装置及びこれを有する自律走行移動体並びにその制御方法を提供する。
【解決手段】走行する自律走行車Cの前方路面上で且つ自律走行車Cの進行方向に対して横切る方向に光軸を走査する水平スキャンレーザレンジファインダ104を二個備え、水平スキャンレーザレンジファインダ104の各光軸の走査線を自律走行車Cの前方路面上で互いに交差させるべく、二個の水平スキャンレーザレンジファインダ104の各走査軸104aを互いに傾けた。
(もっと読む)
自走式装置およびプログラム
【課題】障害物への衝突回避と障害物際までの作業エリア効率をトレードオフした、作業環境にあわせた最適な作業を行うことができる自走式装置を提供することを目的とする。
【解決手段】走行手段23および操舵手段24と、障害物検知手段22と、衝突検知手段9と、障害物検知手段22が障害物を検知した場合、または衝突検知手段9により障害物に衝突したことを検知した場合に本体の移動を制御する制御手段21と、障害物を検知した場合に本体が障害物の手前で停止する接近限界距離を決定する障害物接近限界距離決定手段30とを備え、接近限界距離は衝突検知手段9による障害物の衝突回数を反映して決定するようにした。これによって、障害物の衝突回数を反映して接近限界距離を大小に変動させることができ、障害物への衝突回避と障害物際までの作業エリア効率をトレードオフした作業環境にあった最適な作業を行うことができる。
(もっと読む)
自走式装置およびプログラム
【課題】障害物への衝突回避と、作業時間効率をトレードオフした、作業環境にあわせた最適な作業を行うことができる自走式装置を提供することを目的とする。
【解決手段】走行手段23および操舵手段24と、障害物検知手段22と、衝突検知手段9と、障害物検知手段22が障害物を検知した場合、または衝突検知手段9により障害物に衝突したことを検知した場合に本体の移動を制御する制御手段21と、衝突検知手段9による障害物の衝突回数を反映して本体の走行速度を決定する走行速度決定手段30を備えている。これによって、障害物の衝突回数を反映して本体の走行速度を変動させることができ、作業効率を上げて作業環境にあった最適な作業を行うことができる。
(もっと読む)
床下点検システム、操作装置及び床下点検プログラム
【課題】床下移動体に搭載された撮像装置によって撮像された撮像対象物の位置をユーザが確認可能とする。
【解決手段】床下点検方法は、床下空間内における移動体の所在位置を検出する検出ステップS103と、床下空間の平面図を表示するとともに、検出された所在位置を平面図上に表示する表示ステップS103と、表示される平面図上で、撮像装置が撮像する撮像対象物の位置を指定する指定操作をユーザから受付ける受付けステップS105、ステップS106と、指定操作を受付けた場合、撮像装置によって得られた画像データと、指定操作によって指定された位置を示す撮像位置情報とを関連付けて保存する保存ステップS112とを備える。
(もっと読む)
経路探索システム及び方法、搬送システム、並びにコンピュータプログラム
【課題】経路探索システムにおいて、取り扱うデータ数及び演算負荷を低減しつつ、最適経路を探索する。
【解決手段】経路探索システム(100)は、被搬送物を搬送するための搬送車(2)を該搬送車の経路上で出発地点から目標地点まで移動させる際の最適経路を探索する。経路探索システムは、複数の作業装置を含んで構成される集合を少なくとも一つ含む複数の集合の各々をノードとし且つ該複数の集合の相互間をリンクとして規定される、搬送車の移動コストを格納する格納手段(9)と、格納された移動コストに基づいて、最適経路の少なくとも一部を、複数の集合を結ぶ単位で探索する経路探索手段(6)と、探索された少なくとも一部と、複数の集合のうち前記探索された少なくとも一部に含まれる一又は複数の集合の内部に存在する前記経路の部分とを統合することで、最適経路を特定する経路特定手段(7)とを備える。
(もっと読む)
地図情報作成装置及びそれを備えた自律移動装置
【課題】自律移動装置に備えられる地図情報作成装置において、精度の良い地図情報を作成する。
【解決手段】地図情報作成装置1は、周囲の環境を認識して周囲情報を取得する環境認識部2と、環境認識部2が取得した周囲情報に基づいて地図情報を作成する地図情報作成部3と、自己の位置及び向きを変化させる駆動装置4と、地図情報作成部3が作成した地図情報に基づいて駆動装置4の動作を制御する制御部5と、地図情報を記憶する記憶部6と、地図情報と周囲情報とを照合して自己の位置情報を取得する位置認識部7と、を備える。地図情報作成部3は、地図情報と周囲情報とを照合した結果、位置情報の取得には使用されなかった周囲情報を基にして地図情報を更新するので、地図情報作成装置1は、自律的に移動しながら精度の良い地図情報を作成することができる。
(もっと読む)
移動体及び移動体の走行方法
【課題】 制御性が良い走行軌道をオンボードで生成することによって、移動体の制御がスムーズになり高精度の走行を可能とすると共に、あらかじめ地図や軌道作成などの付帯作業の必要がなく、安価で応用性が高い移動体を提供する。
【解決手段】 移動した移動軌跡を記憶する記憶手段と、前記記憶手段に記憶された移動軌跡を編集して自走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段により生成された自走行軌道に基づいて走行する走行手段と、前記走行手段により実際に走行した軌道である自走行軌跡と、前記走行軌道生成手段により生成された自走行軌道とに基づいて、前記自走行軌跡と前記自走行軌道との誤差が少なくなるように、前記走行手段に補正値を与える走行誤差補正手段とを備える。
(もっと読む)
ペット誘導ロボットおよびペット誘導方法
【課題】人間が付き添うことなくペットの誘導を行うペット誘導ロボットを提供すること。
【解決手段】移動可能なロボット本体部11とペット装着部12およびリード13とからなるペット誘導ロボット10であって、周囲の情報を収集する外部情報収集手段21で得た情報から周囲状況を推定する外部環境認識手段22と、前記リードの張力と長さを収集するリード状態収集手段23と、前記外部環境認識手段22とリード状態収集手段23からペットの運動状況を推定するペット状況推定手段24と、ペットの目標経路を格納する経路情報記憶手段25と、周囲状況とペットの状況、経路情報記憶手段に格納された経路情報をもとに経路を決定する経路計画手段26と、前記経路計画手段の決定した経路に応じて駆動装置を駆動する駆動手段27と、前記周囲状況と前記ペットの状況に応じてリードの張力と長さを最適に調整するリード調整手段29とを備える。
(もっと読む)
自律走行型ラインカー
【課題】運動場等に競技用等のラインを引く作業は、複数人による事前準備から最終的なラインを引くまでの間に多くの手間隙が必要であった。また、ラインを引く作業においても、人の手による熟練の度合いにより出来上がりに違いが出てしまう問題があった。
【解決手段】予め作成された競技用等のラインを引く為のデータを、本体内に格納し、ラインカー本体自身がその格納された事前のラインを引くデータを元に自律して走行することにより運動場等に競技用等のラインを正確に引くことができるようにする。
(もっと読む)
経路作成装置
【課題】処理負荷を軽減しつつ経路ステップサイズを自動的に求めることができる経路作成装置を提供することを課題とする。
【解決手段】ノードを繋ぐ線分を順次接続することによりロボットが障害物を回避する経路を作成する経路作成装置1であって、探索ステップサイズを計算するためのノードの個数を設定する個数設定手段5と、設定された個数分のノードの分散情報に基づいて探索ステップサイズを計算する探索ステップサイズ計算手段6と、計算された探索ステップサイズに応じてノードを探索する探索手段4,6と、探索されたノードを繋ぐ線分を接続し、経路を作成する線分接続手段7とを備えることを特徴とする。
(もっと読む)
搬送台車、停止位置判定方法およびプログラム
【課題】搬送システムが多数の装置を含んでいても、装置の設置位置変更を行なったときの搬送システムの立上げ、搬送システムの変更時に要する工数および時間を抑制できること
【解決手段】軌道を走行して停止し、被搬送物を支給する、または被搬送物を引き取るOHT搬送台車1において、基準画像記憶部は基準画像を記憶する。バーコード検出部33は、レール10に付されたバーコード25を検出する。走行距離測定部は、バーコード25からの走行距離を測定する。走行指示部は、走行距離が予め決められた距離となったときに、当該OHT搬送台車1を停止させる。CCDカメラ2は、OHT搬送台車1が停止したときに、レール10を含む画像を撮像する。停止位置判定部は、基準画像記憶部から読み出した基準画像とCCDカメラ2が撮像した画像とを比較し、これらの差異が基準値の範囲内であれば、目標停止位置に停止したと判定する。
(もっと読む)
自律走行装置とプログラムおよび記録媒体
【課題】往復走行工程の終了検知を精度よく行うことができるようにした自律走行装置を提供することを目的とする。
【解決手段】部屋情報を記憶する部屋情報記憶手段1と、部屋情報から基準となる往復回数を計算し、基本往復回数として出力する往復回数計算手段2と、基本往復回数から基本走行時間を計算する走行時間計算手段3と、終了時刻入力手段4と、基本走行時間と終了時刻から走行開始時間を決定する走行開始時間決定手段5と、計測走行時間手段6と、基本走行時間と計測走行時間手段6による走行時間を入力として走行工程終了を判断する走行工程終了判断手段7とを備えたものである。これによって、部屋に応じて基本走行時間を決定し、基本走行時間と走行時間を入力として走行工程終了を判断するので、非常に簡単な構成でかつ精度良く往復走行の終了を判断することができる。
(もっと読む)
先導者追従車両
【課題】頻繁に加減速や走行停止を繰り返すことのない安定した追従を行いながら先導者が先導者追従車両に自由にアクセスでき、先導者追従車両の動きを操作できる先導者追従車両を実現する。
【解決手段】先導者追従車両1が追従制御を行う追従目標位置は原点が先導者の現在位置、XL軸が先導者の進行方向として定義された先導者中心座標系103において、距離101、角度102で追従制御指示装置を用いて先導者から指定される。角度102、距離101は先導者が突然立ち止まった場合にも先導者に追突することなく安全に停止できる距離や周囲環境のセンシング範囲に制限される。追従目標位置の指定には先導者追従車両1が先導者に対して前進して追従するか後進して追従するかも指定する。前進か後進かを指定できることで先導者によって先導者追従車両が可能な動きの全てを操作することが可能となる。
(もっと読む)
走行車システム
【構成】 走行ルートのレイアウト情報で、開放距離を示すパラメータを指定し、コントローラと走行車8,10とが共有する。各走行車8,10はレイアウト上のパラメータを開放距離に変換するテーブルを持ち、ブロッキングしたポイントを通過後、開放距離だけ走行すると、ブロッキングの解除を地上コントローラ3へ要求する。
【効果】 レイアウト情報を複雑にせずに、複数種の走行車に対して区間毎に最適な車間距離を設定できる。
(もっと読む)
充電池搭載移動体の充電装置
【課題】充電池を搭載した移動体が、充電器に自走して到達し、充電する構成を実現することをもくてきとする。
【解決手段】充電器18から発射される赤外線の線束の左右の限界を移動体1に搭載した左信号受信部12、右信号受信部13によって検出し、線束の中心に向かって進行し、再度線束の中心を検出することを繰り返す。また、移動体1の充電用接点11の左右には左ガイド16、右ガイド17が設置され、充電器18側に摺動可能に設けられた電力供給用接点23と充電用接点11が嵌合するのを助ける構成とした。
(もっと読む)
自律移動装置
【課題】マルチパス環境下においても精度良い測位ができ、走行経路に対して精度良く走行することができる自律移動装置を提供することにある、
【解決手段】自律移動装置1の測位部3は、平面内で規定した絶対座標系における座標位置を既知位置に配置された少なくとも3台の電波発信器21〜23からの電波の到来方位を用いて検出する。この際測位アルゴリズム処理部35は、電波発信器21〜23の少なくとも一つについて直接波と反射波とを共に設定し、直接波と反射波との別を考慮して電波発信器21〜23を3つ選択して組にし、各組毎に、各電波発信器からの電波の到来方位を用いて求めた座標位置から既知の電波発信器21〜23を見込む時の各電波発信器21〜23の存在方位を求めるとともに、到来方位と存在方位とを照合して到来方位と存在方位ととが整合すると判定された直接波と反射波との別を考慮した電波発信器の組から得られた座標位置を採用する。
(もっと読む)
無人車両の誘導走行制御方法および制御装置
【課題】目標排土点のみを教示することで走行コースを作成できるようにして、教示作業の効率向上等を図り作業効率を向上させる。また無人車両同士の干渉を確実に防止し、しかも精度よく目標に到達できるようにする。
【解決手段】目標排土位置41を、目標進行方向43とは逆向きとなるホッパ坑40から遠ざかる方向に、無人車両10の車体がホッパ坑40に干渉しなくなる位置までずらした位置が、補正目標排土位置42として求められる。つぎに、ホッパ坑40の領域61が、無人車両10との干渉が禁止されるホッパ迂回領域60として作成される。つぎに、このホッパ迂回領域60と、補正目標排土位置42と、前記目標排土位置41における目標進行方向43とに基づいて、無人車両10が、ホッパ迂回領域60と干渉しないで、補正目標排土位置42に目標進行方向43で進入するように、無人車両10を誘導走行させる補正走行コース70´が作成される。
(もっと読む)
自律移動体
【課題】移動する移動領域内における環境情報を大掛かりな設備を用いることなく広く取得し、より適切な自律移動を可能とする自律移動体を提供すること。
【解決手段】移動領域内において特定される移動マップP上を自律的に移動する自律移動体10において、自律移動体10を、駆動部13により駆動される移動手段を備える移動体本体10aと、移動体本体10から装着かつ物理的に分離可能に構成され、前記移動領域の高さ方向の空間を含む3次元領域を移動可能な移動別体100とで構成し、自己の記憶した移動マップP上において、周囲の環境情報に基づいて移動経路を作成するとともに、移動別体100により把握された広範囲の環境情報である広域環境情報に基づいて、作成した移動経路を修正するようにした。
(もっと読む)
移動体システム
【課題】住人等の快適性を確保した上で移動体を走行させる際の有用性を高めることができる移動体システムを提供する。
【解決手段】建物10において、1階フロアのほぼ中央部であって、ダイニング13、玄関部11及び納戸16により囲まれた部位にはロボット収容室21が設けられている。ロボット収容室21には複数の部屋に直接通じる複数の出入り口22〜24が設けられており、それら各出入り口22〜24にはそれぞれ扉体25〜27が設けられている。本建物10においては、ロボット収容室21を起点及び終点として、部屋ごとの走行経路が設定される。そして、移動ロボット40は、メモリに記憶された地図情報を参照しつつ走行経路に基づいて走行する。
(もっと読む)
41 - 60 / 150
[ Back to top ]