
Fターム[5H301KK03]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 移動体の移動経路を制御するもの (135)
Fターム[5H301KK03]に分類される特許
1 - 20 / 135
無人走行体の遠隔操縦システム
【課題】往路走行モード選択時における遠隔操縦装置の操作感と、復路走行モード選択時における遠隔操縦装置の操作感とを共通化し、無人走行体の遠隔操縦性を高める。
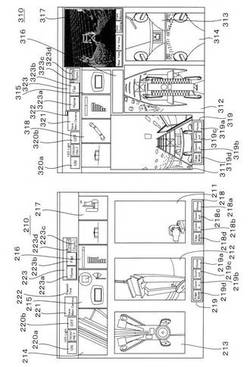
【解決手段】手持ちコントローラ205,305に、無人走行体4,5の走行モードを往路走行モード又は復路走行モードに切り換える前後進切換スイッチ410,411と、無人走行体4,5の走行方向を指示するジョイスティック408を備える。無人走行体の走行モードを往路走行モードから復路走行モードに切り換えたとき、表示装置202,302の第1表示部211,311に表示される映像を、往路前方撮影カメラの撮影映像から復路前方撮影カメラの撮影映像へと切り換える。また、往路走行モードへの切換時と復路走行モードへの切換時とで、手持ちコントローラ205,305の操作内容に応じた無人走行体4,5の動作を同一に保つ。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】無人走行体の遠隔操縦を過不足なく行うことができ、かつ無人走行体の誤操作を確実に防止可能な遠隔操縦装置を備えた無人走行体の遠隔操縦システムを提供する。
【解決手段】オペレータが操作する遠隔操縦装置として、タッチパネル203,303と手持ちコントローラ205,305の双方を備える。これらの各遠隔操縦装置によって共通に行える無人走行体の操作と、タッチパネル203,303によってのみ行える無人走行体4,5の操作と、手持ちコントローラ205,305によってのみ行える無人走行体の操作とを設定する。
(もっと読む)
自動搬送システム
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
搬送車システムのシミュレーションシステムとシミュレーション方法
【課題】
共通のシミュレーション結果に対し、複数の端末で各々の観点から解析を行う。
【構成】
処理装置間でワークを搬送する搬送車システムをシミュレーションする。搬送車システムでの複数の仮想的な搬送車の走行をシミュレーションし、シミュレーションにより得られたデータと搬送車システムの背景画像とを複数の端末へ送信する。各端末は、データを画像として表示する搬送車システム内のエリアと時間の範囲とを端末毎にユーザが指定し、指定された範囲内のデータを画像化すると共に搬送車システムの背景画像と合成し、合成された画像をモニタに表示する。
(もっと読む)
無人搬送車
【課題】SLAM技術を用いた無人搬送車であっても、古典的な誘導方法で走行する無人搬送車と同様に簡単な方法で走行制御の破綻を監視することができる無人搬送車を提供すること。
【解決手段】SLAM技術を用いて現在位置を求め、求められた現在位置を基に、予め設定されている経路データ123に沿って走行し、経路データ123と無人搬送車1の現在位置とのずれを補正するための旋回角θ及び無人搬送車1の進路方向が目標位置に向くための操舵角ρを無人搬送車1が経路データ123に沿って走行するように補正しながら制御する制御手段10と、制御手段10による補正量の変動を監視するとともに、補正量が外乱によって制御可能な範囲を逸脱したときに走行を停止する監視手段11とを備える。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
搬送車システム
【課題】効率的な搬送作業を実現するための搬送車システムを提供すること。
【解決手段】複数のステーション120に沿って設けられた経路105と、経路105に沿って走行する台車140と、台車140の制御を行うコントローラ110とを備える搬送車システム100であって、台車140は、走行方向に並べて配置された第一載置台141と第二載置台142とを有し、方向転換することで、第一載置台141および第二載置台142のいずれをも走行方向における前方とすることが可能であり、コントローラ110は、荷物の移載作業の内容と荷物の載置状況とを用いて、第一載置台141および第二載置台142のいずれを前方にすべきかを決定する決定部112と、台車140の走行を制御することで、台車140を、決定された第一載置台141または第二載置台142が前方である状態で、目的ステーションに到着させる走行制御部114とを有する。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、接続軌道を効果的に短縮し、省スペースを実現する。
【解決手段】有軌道台車システムは、第1及び第2の本軌道(101,102)、並びに接続軌道(105)を有する軌道(100)と、台車(200)とを備える。台車は、一対の第1及び第2の分岐ローラ(610)をシフト可能に支持する分岐ローラ支持部(720)と、姿勢安定ローラ(620)をシフト不能に支持する姿勢安定ローラ支持部(710)とを有している。軌道は、第1の分岐ローラを案内する第1の分岐ガイド(110a)と、第2の分岐ローラを案内する第2の分岐ガイド(110b)と、無ガイド区間で姿勢安定ローラを案内する姿勢安定ローラガイド(120b)とを有している。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
移動動作決定装置、その方法及びプログラム
【課題】簡素化された構成で確実に障害物を回避し、移動体の最適な経路を決定すると共に、様々な目的に応じた適応的な行動選択を行うことができる移動動作決定装置等を提供する。
【解決手段】検出対象物の大きさに応じてポテンシャルを設定するポテンシャル設定部21と、検出領域を区画する区画検出領域のうちポテンシャルを含んでいる区画検出領域を特定する区画検出領域特定部22と、区画検出領域ごとに、含まれるポテンシャル値を検出値として算出する検出値算出部23と、区画検出領域の組み合わせ検出パターン、及びそれに対応する出力動作を動作設定情報として記憶する動作設定情報記憶部27と、動作設定情報の組み合わせ検出パターンとを比較して、移動体10の出力動作を特定する出力動作特定部24と、特定した出力動作に対して、検出値に基づいて出力動作を最適化して決定する動作決定部25とを備える。
(もっと読む)
群ロボット制御システム、群ロボット制御装置、及び群ロボット制御方法
【課題】労力や訓練を必要とせずに、直感的に複数のロボットの整列制御を行うことができる群ロボット制御システムを提供する。
【解決手段】群ロボット制御システム100は、自走によって移動可能な複数のロボット101〜109と、線分を描くことで複数のロボット101〜109の整列パターンを入力するためのタッチパネル20と、タッチパネル20に入力された整列パターンに基づいて、複数のロボット101〜109の移動を制御するための制御信号を生成する制御信号生成部と、制御信号生成部にて生成された制御信号を複数のロボット101〜109に対して送信する制御信号送信部とを備えている。
(もっと読む)
走行データ生成装置
【課題】走行データを生成するために予め記憶手段に記憶しておくデータの量を抑制できる走行データ生成装置を提供すること。
【解決手段】上位プロコンより行先指令が通知されると、無人搬送車両を走行させるために必要な動作コマンド列が、事前に設定されるテーブルから必要分抽出されて、動作コマンド列全体が生成される。本実施形態では、走行経路R上に配置されるステーションCの中から、隣設する3つのステーションCの組み合わせだけを全て求め、その各組み合わせに対応する動作コマンド列をテーブルに設定している。よって、隣設するもの及びしないものを含む2つのステーションCの各々について、その組み合わせを全て(総当たりで)求め、その組み合わせに対応する動作コマンド列をテーブルに設定するよりも、ステーションCの組み合わせの数を少なくできるので、テーブルのサイズを小さくできる。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
ネットワークシステム、コントロール方法、コントローラ、およびコントロールプログラム
【課題】コントローラからの指令に基づいて移動する模型装置を利用した新たなネットワークシステムを提供する。
【解決手段】コントローラ100は、模型装置を移動させるための指令を受け付け、指令を模型装置へ送信する。模型装置200は、コントローラからの指令に基づいて模型装置を移動させ、模型装置の前方を撮影し、模型装置の位置を取得し、模型装置の向きを取得し、撮影画像と位置と向きとをコントローラに送信する。コントローラは、模型装置から受信した位置と向きとに基づいて、模型装置用のコースのデータから表示用のバーチャル画像を作成し、模型装置から受信した撮影画像とバーチャル画像とを合成した画像をディスプレイ130に表示させる。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
自律走行搬送システム
【課題】どのような経路であってもその経路に沿って搬送することができ、且つ経路から外れた場合に迅速、且つ的確にもとの経路に戻ることができる自律走行搬送システムを提供する。
【解決手段】搬送経路に配置された複数のICタグと、走行駆動機構と、前記ICタグの情報を読み取るタグリーダと、これらの走行駆動機構とタグリーダの動作をコントロールする制御部とを備え位置を把握しながら搬送経路に沿って走行する搬送台車とにより構成され、制御部は、搬送経路に関するマップ情報を格納するメモリと、ICタグ情報とマップ情報に基づいてドライバをコントロールするCPUとを備え、CPUは、前記マップ情報を基に搬送台車をICタグの間で自律走行させる一方、複数のタグリーダからのICタグ情報により搬送台車の搬送経路からのずれを検出してドライバに走行修正信号を送付するようにした。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
1 - 20 / 135
[ Back to top ]