
Fターム[5H301KK08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 集中監視制御 (930) | 移動体の状態の監視 (295) | 移動体の位置 (198)
Fターム[5H301KK08]に分類される特許
1 - 20 / 198
自動搬送システム
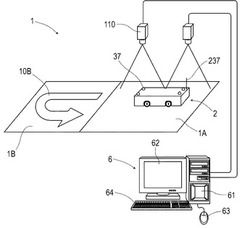
【課題】コストを抑制しつつ、走行経路の変更要求に柔軟に対応できる自動搬送システムを提供すること。
【解決手段】操舵可能な駆動輪を含む駆動ユニット、及び駆動ユニットを制御する制御ユニットを備えた自動搬送車2と、自動搬送車2の位置を検知する位置検知手段と、を備え、予定された経路に沿って自動搬送車2を移動させる自動搬送システム1では、自動搬送車2が移動するエリアとして、位置検知手段による検知位置を利用して自動搬送車2が制御される誘導走行エリア1A、及び自動搬送車2の位置が検知されないエリアであって検知位置を利用することなく自動搬送車2が制御される自律走行エリア1Bが設定されている。
(もっと読む)
搬送車システム

【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
計測システムおよび計測方法
【課題】距離計測センサを用いて、観測領域内の移動対象を追跡しつつ、精度よく、対象を識別して分類することが可能な計測装置を提供する。
【解決手段】計測装置100は、対象までの水平方向の距離を計測可能に配置された複数のレーザレンジファインダ10.1〜10.4と、計測結果から、対象の位置および移動速度を推定する追跡モジュール5610と、計測結果に基づいて、対象の形状を表現する特徴ベクトルを算出する特徴抽出演算部5622と、特徴ベクトルに基づいて、対象が予め定められた分類の各クラスに属する確率を事前確率として算出する事前確率計算部5624と、対象が他の対象と同期して移動している同期状態であるかを判別し、算出された事前確率と、同期状態にある対象が各クラスに対応する尤度とに基づいて、対象が属するクラスを判別するラベル割当処理部5628とを含む。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
処理設備
【課題】処理装置の制御負荷の増加を回避しながらも、処理作業効率の向上を図ることができる処理設備を提供する。
【解決手段】複数の処理装置1及び処理対象物を貯留する貯留装置Qを経由する搬送ラインに沿って走行して処理対象物を搬送する搬送車3を管理する搬送管理手段HCが、処理装置1から主管理手段JCに対して通信される処理進行情報を監視して、複数の処理装置1のうちで、処理対象物の処理が終了した又は終了間近である処理装置1を、主管理手段JCから搬送指令情報が通信されてくる以前に、事前搬送元として抽出し、その処理装置1から処理対象物を搬出するために、事前搬送元として抽出した処理装置1に対して搬送車3を走行させる事前搬送制御を実行するように構成されている。
(もっと読む)
搬送車システム、速度決定方法
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
移動予測装置、ロボット制御装置、移動予測プログラムおよび移動予測方法
【構成】移動予測装置10は複数のLRF12およびロボット14を備える。また、予測移動装置10は、複数のLRF12によって人々の移動軌跡を記録し、分析することで短期的な移動の目標となる経由点vを空間に設定する。人の移動は複数の経由点を含む経由点系列によって表すことができ、この経由点系列は、そのときの移動時間tおよびその経由点系列の移動遷移確率pが関連付けられて、経由点リストLに記録される。そして、移動予測装置10は、経由点リストLを利用して、予測移動時間T後において、人が各経由点vへ到達する到達確率Pを算出する。
【効果】移動予測装置10は、各経由点vへの到達確率Pに基づいて、人が到達する位置を予測することができる。また、予測された到達位置または設定された各経由点vに基づいて、ロボット14の行動を決めることができる。
(もっと読む)
群ロボット制御システム、群ロボット制御装置、及び群ロボット制御方法
【課題】労力や訓練を必要とせずに、直感的に複数のロボットの整列制御を行うことができる群ロボット制御システムを提供する。
【解決手段】群ロボット制御システム100は、自走によって移動可能な複数のロボット101〜109と、線分を描くことで複数のロボット101〜109の整列パターンを入力するためのタッチパネル20と、タッチパネル20に入力された整列パターンに基づいて、複数のロボット101〜109の移動を制御するための制御信号を生成する制御信号生成部と、制御信号生成部にて生成された制御信号を複数のロボット101〜109に対して送信する制御信号送信部とを備えている。
(もっと読む)
移動動作決定装置、その方法及びプログラム
【課題】簡素化された構成で確実に障害物を回避し、移動体の最適な経路を決定すると共に、様々な目的に応じた適応的な行動選択を行うことができる移動動作決定装置等を提供する。
【解決手段】検出対象物の大きさに応じてポテンシャルを設定するポテンシャル設定部21と、検出領域を区画する区画検出領域のうちポテンシャルを含んでいる区画検出領域を特定する区画検出領域特定部22と、区画検出領域ごとに、含まれるポテンシャル値を検出値として算出する検出値算出部23と、区画検出領域の組み合わせ検出パターン、及びそれに対応する出力動作を動作設定情報として記憶する動作設定情報記憶部27と、動作設定情報の組み合わせ検出パターンとを比較して、移動体10の出力動作を特定する出力動作特定部24と、特定した出力動作に対して、検出値に基づいて出力動作を最適化して決定する動作決定部25とを備える。
(もっと読む)
操舵制御装置
【課題】搬送車両に多数の車軸が設けられている場合でも、その搬送車両を走行経路に沿って円滑に走行させることができる操舵制御装置を提供すること。
【解決手段】本実施形態では、各走行装置5a〜5lの車軸6aに対して操舵角θ1〜θ12を設定する場合に、操舵角設定テーブル72cから、各操舵角θ1〜θ12を取得している。よって、計算式により各操舵角θ1〜θ12を算出する場合よりも、演算量を少なくできるので、CPU71の演算時間も短くできる。従って、本実施形態のように、走行装置5a〜5lの数が多い場合でも、CPU71に掛かる負担が大きくならず、演算時間も長くならない。故に、各操舵角θ1〜θ12の設定を短い周期で実行することができ、走行経路R上に沿って無人搬送車両1を円滑に走行させることができる。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
移動体遠隔操縦システムおよびそのための制御プログラム
【課題】 通信障害領域が存在する環境でも、簡単な構成で移動体を安全に遠隔操縦可能にする。
【解決手段】 移動ロボット遠隔操縦システム100はCPU(80,20,40)およびメモリ(84,22,42)を含み、メモリの保存領域(170,130,150)には地図情報(138)が、一時記憶領域(180,140,160)には地図情報に対応する区域内で無線通信に障害が生じる通信障害領域(IO1〜IO5)を示す情報が仮想障害物情報(148)として記憶される。CPUは、センサ(122,124,40,46,58,70,112a,112b)からの情報に基づいて、地図情報に対応する区域での移動ロボット10の少なくとも位置を検出し(S1,S5)、地図情報および仮想障害物情報と検出結果とに少なくとも基づいて、通信障害領域を回避するように移動体を移動させる移動制御情報(182a)を作成する(S75,S105)。
(もっと読む)
無人車両の走行システムにおける走行制御方法および無人車両の走行システム
【課題】作業現場が施工された後、無人車両を走行させるまでに行なわれる作業現場の詳細な地形データを計測する工程、走行経路を生成する工程を不要とし、作業現場施工後、即座に走行経路に沿って無人車両を走行可能として、無人車両の生産性を向上させるとともに作業現場の運用コストを低減させる。
【解決手段】作業現場の地形データを作成して新たな走行経路の情報を生成する。次に、作成された地形データに基づいて新たな走行経路を含む作業現場を施工する。次に、生成された新たな走行経路の情報を車両に与え、仮の走行制御データに従い当該新たな走行経路に沿って走行させて、新たな走行経路の実際の地形データを取得する。次に、取得された新たな走行経路の実際の地形データに基づいて前記仮の走行制御データを修正する。次に、修正された走行制御データに従い無人車両を走行させる。
(もっと読む)
無人車両の走行システムおよび走行経路生成方法
【課題】経由点を最適な地点に設定する。
【解決手段】走行経路10上にあって積込点12の手前のスイッチバック点13を、積込点12の位置移動に応じて位置移動する移動地点としてその初期位置情報を指示する。指示されたスイッチバック点13の初期位置情報と、積込点12の位置情報とに基づいて、積込点12とスイッチバック点13との相対位置関係Aの情報を生成する。積込点12の位置が移動すると、当該位置移動後の積込点12´の位置情報と、当該積込点12´における無人車両20´の向きの情報と、相対位置関係Aの情報とに基づいて、当該相対位置関係Aを維持できる位置に新たなスイッチバック点13´を設定し、新たなスイッチバック点13´を経て位置移動後の積込点12に至る走行経路10´を生成する。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
搬送車システム
【課題】複雑な処理を行うことなく搬送車の集中を防ぎ、搬送車を効率良く運用することができる搬送車システムを提供する。
【解決手段】第一ステーションエリア20と第二ステーションエリア30との間の搬送経路を走行し物品の搬送を行う複数の搬送車200と、複数の搬送車200を制御する制御装置100とを備える搬送車システム10であって、制御装置100は、ステーション21への物品の搬出に向かう搬送車200であって、搬送経路内の所定区間を走行する搬送車200である対象搬送車の台数を計測する計測部110と、計測部110が計測した台数が所定の値を超えた場合に、対象搬送車に含まれる少なくとも1台の搬送車に、ステーション21への物品の搬出後に、ステーション22からの物品の搬入を行わせる搬出入指示部120とを備える。
(もっと読む)
搬送車システム
【課題】搬送車の自動走行を継続させつつ、作業用エリアへの搬送車の侵入を防止することが可能な搬送車システムにおいて、作業用エリアでの安全性を向上させる。
【解決手段】搬送車システム1について説明する。搬送車3は、軌道2に沿って走行する。第2光電センサ48は、搬送車3に設けられている。通行禁止ゲート71は、軌道2に設置可能であり、第2光電センサ48によって検出可能なミラー87を有する。第1リミットスイッチ95は、軌道2に設けられ、通行禁止ゲート71が軌道2に設置されたことを検出する。コントローラ本体54は、第2光電センサ48からの検出結果によって通行禁止ゲート71が設置されたことを把握すれば、通行禁止ゲート71の片側を自動走行許可エリアに設定することを有効にする。
(もっと読む)
無人搬送車および走行制御方法
【課題】自車位置の推定精度を向上させる無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】計測データと地図データ132とのマッチングにおいて、不一致箇所が検出されても、その不一致箇所をマッチングの対象から除外するマスクエリア510を、地図データ132において設定することを特徴とする。無人搬送車の位置推定の際には、その不一致箇所を除外した計測データを用いる。マスクエリア510には、無人搬送車の走行エリアにおいて、レーザ距離センサで計測するたびに状況が変わるエリア(例えば、パレット置場や、充電器置場など)が設定されるのが望ましい。
(もっと読む)
1 - 20 / 198
[ Back to top ]