
Fターム[5H301QQ01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 特殊な動作をする移動体 (317) | 他の搬送機器と連繋するもの (54)
Fターム[5H301QQ01]の下位に属するFターム
エレベータと連繋するもの (11)
Fターム[5H301QQ01]に分類される特許
1 - 20 / 43
物品処理設備
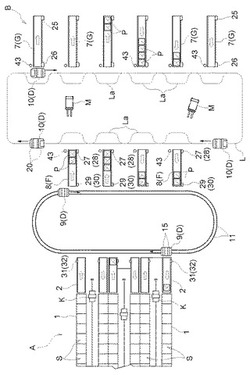
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
物品搬送装置

【課題】低コストの簡易な制御手段であっても制御できるように制御条件を簡素化することができる物品搬送装置を提供すること。
【解決手段】複数台のトラバーサ4a,4b,4cが同一のレール5に沿って走行されるとともに、このレール5の複数箇所に設けられるコンベヤ14〜18にて、各トラバーサ4a,4b,4cにコンテナ2が移載されるようになっており、所定の制御条件に基づいて、トラバーサ4a,4b,4cをコンベヤ14〜18に移動させる制御を行う制御手段が設けられる物品搬送装置1であって、制御条件によって、各コンベヤ14〜18が各トラバーサ4a,4b,4cの配置に対応させて予めグループ化されており、制御手段は、各トラバーサ4a,4b,4cが対応するグループS1〜S3のコンベヤ14〜18に向かう動作を互いに同期させる制御を行う。
(もっと読む)
車両
【課題】少ない部品数で、台車の向きを保持したまま横方向に移動できる車両を提供する。
【解決手段】車両本体が台車と、台車に相対回転可能に連結された駆動ユニットと、駆動ユニットに配置され、独立駆動かつ正逆回転可能な一対の駆動輪と、駆動ユニット及び台車を相対回転不能に拘束可能な旋回ブレーキと、操舵角度を算出する操舵角度算出部とを備え、台車の向きを保って車両本体を横方向に移動させる際に、一方の駆動輪を正回転し、他方の駆動輪を逆回転させることで、操舵角度算出部で算出した操舵角度が予め設定した角度に至るまで、駆動ユニットを操舵及び旋回するとともに、操舵角度と等しい角度だけ、台車を逆方向に旋回させて、旋回ブレーキで拘束して車両本体を移動する。
(もっと読む)
物品搬送設備
【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、下位のコントローラだけで運用試験を行うときに自動運転を可能にする。
【解決手段】搬送車システムは、搬送車を搬送させるための搬送車システムであって、複数のストッカ(51,53,55,57)と、搬送車(44,48)と、複数のコントローラ(52,54,56,58)とを備えている。ストッカは、内部で物品を搬送可能である。搬送車は、複数のストッカ間で物品を搬送可能である。複数のコントローラは、互いに通信可能であり、複数のストッカおよび搬送車を制御する。コントローラは、搬送制御部61と、シナリオ記憶部63と、搬送指令作成部62とを有している。搬送制御部61は、搬送指令を実行することで搬送制御を行う。シナリオ記憶部63は、複数の搬送指令作成情報を含む搬送パターンシナリオを記憶する。搬送指令作成部62は、搬送指令作成情報に対応する搬送指令を作成する。
(もっと読む)
移動体システム
【課題】 移動体の位置を連続的に監視しながら、移動体を駆動するリニアモータの1次側を連続的に制御する。
【構成】 リニアモータの2次側部材を備えた複数の移動体と、移動体の移動経路に沿って2次側部材の長さ以下のピッチで複数設けられたリニアモータの1次側部材とを設ける。移動体の位置を検出するセンサを2次側部材の長さ以下のピッチで設けると共に、センサからの位置信号により1次側部材を制御するコントローラを設ける。
(もっと読む)
搬送システムと搬送指令の転送方法
【課題】搬送車システムに異常がある場合の無駄な通信を減らし、かつ搬送要求を実行不能とするまでの処理を簡単化する。
【解決手段】上位コントローラに、走行ルートを構成する部分ルートの接続関係と、各部分ルートの走行の可否とを記憶するための記憶部とを設ける。記憶部のデータから、搬送要求を実行するために必要な部分ルートと部分ルートの走行の可否とを求めて、搬送要求の内で実行可能な搬送要求のみを下位コントローラへ送信する。
(もっと読む)
バッテリ自動交換・自動充電装置
【課題】無人搬送台車の稼働率を下げることなく、無人搬送台車のバッテリ交換を自動的に行うことができる無人搬送台車のバッテリ自動交換・自動充電装置を提供する。
【解決手段】バッテリBを搭載するバッテリトレー10を有する無人搬送台車1と、無人搬送台車1を位置決めすると共に、無人搬送台車1を搬送する搬送機構20と、搬入レーン31および搬出レーン32a、32b、32cを備えたバッテリBを搬送するコンベア30と、搬入レーン31の端部31aに隣接する床面に立設され、バッテリトレー10の一端側を押し上げて該バッテリトレーを傾斜させる台座60と、搬入レーン31および搬出レーン32a、32b、32cの上方にそれぞれ設置されているバッテリBを着脱自在に接続する充電用電源端子45a〜jとを備えている。
(もっと読む)
測距方法及び車載測距装置
【課題】床面に近い位置に置かれた障害物を精度良く検知できる測距方法を提供する。
【解決手段】発光部から出力された測定光を所定周期で繰り返し走査して対象物からの反射光を受光部に導き、測定光と反射光の検出時間差に基づいて対象物までの距離を算出する測距装置を車両に取り付けて、走査面が測定対象平面と交差するように測定光を走査して、測定対象平面または対象物までの距離を算出し、所定の走査角度で算出された距離に基づいて測定対象平面に平行な仮想平面を生成し、各距離を仮想平面からの鉛直距離に換算し、換算した鉛直距離と当該鉛直距離に対応する測定対象平面上の測定光の走査位置との相関を表す近似線を算出し、換算した鉛直距離が当該近似線から求まる鉛直距離より所定の閾値以上短い値を示す走査位置に対象物が存在すると検知する各ステップを所定の走査周期毎に繰り返す。
(もっと読む)
搬送車システム
【課題】搬送車システムにおいて、搬送車が目的地まで最短距離で走行すると荷つかみまたは荷下ろしできない場合でも、搬送効率を低下させない。
【解決手段】搬送車システム1は、複数の経路と、搬送車3と、搬送車コントローラ27とを備えている。複数の経路はあらかじめ定められている。搬送車3は、複数の経路を走行して物品Wを搬送する。搬送車コントローラ27は、入庫ポート13において荷下ろしが可能か否かを判断する。搬送車コントローラ27は、さらに、荷下ろしが可能ではないと判断すると、入庫ポート13への走行路として最短距離の経路より長い距離の経路を選択して搬送車3に指示することができる。
(もっと読む)
移動型の搬送物受渡し装置
【課題】移動型の搬送物受渡し装置において、簡単な構成により、移動可能な位置に任意に配置されたステーションの固定された載置台に対して、柔軟な搬送物であっても、搬送物の受取りまたは置渡しを行うことを可能とし、かつ、ステーション間で搬送を行うことを可能とする。
【解決手段】本装置1は、搬送物Mが載置される上下動可能な、櫛歯状部材21を有した移載部2と、移載部2を上下動させる駆動部3とを備える。移載部2は、ステーションSTにおける櫛歯状部材51を有した載置台5に対して両者の櫛歯状部材21,51が互いに噛み合わせ可能なように構成されている。制御部10は、両櫛歯状部材21,51が前後方向において互いに噛み合わせ可能な位置に装置1を移動させ、さらにステーションSTに接近させて移載部2を載置台5に噛み合わせた状態とし、移載部2の上動または下動によって搬送物Mの受渡しを行う。
(もっと読む)
車両の誘導装置
【課題】
走行コースの修正を作業効率よく行うようにする(ティーチングによる方法よりも作業効率よく走行コースの修正を行う)。
【解決手段】
走行位置計測手段で計測される無人車両の走行位置と、該無人車両の誘導コースを規定するコースデータとに基づいて、前記無人車両を前記誘導コースに沿って誘導走行させる無人車両の誘導装置であって、コースエリアの境界線のデータを入力する手段と、移動起点の位置とその位置における前記無人車両の方向および移動目的点の位置とその位置における車両進行方向とをそれぞれ指示する手段と、前記移動起点の位置および移動目的点において、前記指示された位置と車両進行方向が満足されるコースデータを作成する手段と、前記作成されたコースデータで規定される誘導コースで無人車両を走行させた場合の該無人車両と前記コースエリアの境界線との干渉を推認する手段と、前記干渉が推認された場合に、前記コースデータを変更するコースデータ変更手段と、を備える。
(もっと読む)
搬送車システム
【課題】自動倉庫等からステーションに荷物が次々と搬入される場合に、搬送の遅れを低減し、搬送効率を向上させることができる搬送車システムを提供する。
【解決手段】搬送車システムは、予め設けられた一方通行の走行経路110と、走行経路110に沿って配置され、荷物200が載置されるステーション120と、走行経路110に沿って走行することにより、ステーション120に載置された荷物200を目的地まで搬送する複数の搬送車130と、複数の搬送車130を制御する搬送車コントローラ150とを備え、搬送車コントローラ150は、ステーション120から搬送する予定の荷物の数量である搬送予定数量を取得する数量取得部と、搬送予定数量よりも一つ少ない数以上の搬送車130が、ステーション120より走行経路110の上流側の位置に待機するように複数の搬送車130を制御する制御部とを有する。
(もっと読む)
移動体の位置表示システム
【課題】無人搬送車の位置表示システムにおいて、無人搬送車の正確な位置を認識でき、尚且つ、走行ルート全体を表示できる技術を提供する。
【解決手段】走行ルート1に沿って走行する無人搬送車2の位置を表示するディスプレイ17を備えたシステムおいて、走行ルート1に位置情報ポイントPを設定する。位置情報ポイントPは走行ルート1の始点3から終点4までの全距離に対する始点3から位置情報ポイントPまでの距離の百分率を位置情報Qとして設定する。設定した位置情報ポイントP間の特定の走行ルート1を拡大し、他の特定の走行ルート1を縮小して表示移動経路として表示する。地上制御盤10は、無人搬送車2からの情報を基に走行ルート1の始点3から終点4までの距離に対する始点3から無人搬送車2までの距離の百分率を移動体位置情報Aとして換算する。この移動体位置情報Aを基に表示移動経路上に無人搬送車2の位置を表示移動経路上に表示する。
(もっと読む)
搬送設備
【課題】本発明は、簡単な構成で、自走台車のエンジン位置をトロリ装置の車体のエンジン取付位置に自動同期させることができる搬送設備を提供することを目的とする。
【解決手段】トロリ装置3に設けた、進み検出用反射板58と遅れ検出用反射板60を、自走台車15に設けた光電スイッチ31,33により検出し、進み検出用反射板58のみが検出されると自走台車15を減速し、遅れ検出用反射板60のみが検出されると、自走台車15を加速する。この構成により、自走台車15をトロリ装置3に同期することができ、この際にトロリ装置3の走行速度を計測し、自走台車15に通信する必要がなく、また自走台車15からトロリ装置3に何ら通信する必要はなく、設備を簡略化することができる。
(もっと読む)
ワーク搬送装置およびワーク搬送方法
【課題】タイムロスのない旋回・方向転換に好適なワーク搬送装置およびワーク搬送方法を提供する。
【解決手段】無人搬送車2を搬送台車1に対して旋回可能であり且つ搬送台車1に対して切離し可能な連結手段12,13を介して連結し、前記搬送台車1とワーク受入れ装置3との連結後に、無人搬送車2と搬送台車1との連結手段12,13を切離し、無人搬送車2の向きを反転させて搬送台車1に連結手段12,13により連結し、無人搬送車2のワーク積載装置への曲線状の前進走行により、ワークWの供給完了後の搬送台車1を旋回させつつ進行方向に牽引するようにした。
(もっと読む)
走行車システム
【構成】 コントローラから走行車に搬送指令を割り付け、物品の搬送と受け渡しとを行う。コントローラは、走行車からの搬送指令の完了報告の受信前に、次の移動先を指示し受け渡しを指示しない移動予約を走行車に送信し、完了報告を受信すると次の搬送指令を送信する。走行車は搬送指令を完了するとコントローラへ報告し、移動予約を受信すると、実行中の搬送指令の完了後に移動予約で指示された移動先へ走行する。
【効果】 走行車がコントローラからの指令を待って停止する期間が無く、また走行車が搬送指令を2重に持つタイミングが生じない。
(もっと読む)
自動搬送システムおよび自動搬送システムにおける搬送車の待機位置設定方法
【課題】搬送車の待機位置の最適化を図ることによりキャリアを効率的に搬送することが可能な自動搬送システムおよび待機位置の設定方法を提供する。
【解決手段】断続的に供給される搬送指令に基づいて所定の経路網を自動的に移動して経路網に沿って設置された複数の処理装置間において搬送物を搬送する少なくとも1台の搬送車と、搬送車制御手段と、複数の停止位置、複数の移動位置、処理装置の各々の搬送物の単位時間あたりの処理数とが記録された記録手段と、搬送車が搬送指令を受ける前の待機状態にあるときの待機位置設定手段とを含み、待機位置設定手段は、記録手段に記録された停止位置、移載位置および処理能力情報に基づいて、停止位置のうちの何れかを待機位置としたときの当該停止位置と移載位置の各々との間の搬送車の搬送指令に基づく単位時間あたりの総移動距離を停止位置毎に算出し、そのうち最小値に対応する停止位置を待機位置として設定する。
(もっと読む)
無人搬送車を用いた作業システム
【課題】 少ないAGVを用いて並列に配置された作業ゾーンに、効率よくワークを搬送する。
【解決手段】 AGVは台車を着脱可能に連結するとともに、誘導経路が、分岐点と合流点との間に作業ゾーンがそれぞれ配置された複数の分岐路と、合流点から作業が完了したワークを回収する回収ゾーンに至る経路と、合流点と分岐点の間の巡回経路とを有し、各作業ゾーンについて、ワークに対する作業が完了した、または最も早く完了するゾーンを検出する作業完了ゾーン検出手段と、ワークを搭載した台車を牽引するAGVを作業ゾーンに移動させた後、該台車との連結を解除させ、連結解除状態のAGVを巡回経路及び分岐点を経由して作業完了ゾーン検出手段で検出した作業ゾーンに移動させるとともに、該作業ゾーンにおいて、該AGVに作業が完了したワークを搭載した台車を連結させ、これを合流点を経由して回収ゾーンに移動させるAGV制御手段とを有する。
(もっと読む)
走行体が適用される建物、建物用の走行体及び建物用の走行体システム
【課題】高さ位置が相互に異なる床が存在する建物において、単一又は少数の走行体での対応を可能とする建物、その建物用の走行体及び建物用の走行体システムを提供する。
【解決手段】住宅10は、二階床部14によって上下に仕切られた一階スペース11と二階スペース12とを備えており、さらにこれら一階スペース11及び二階スペース12に隣接させて吹き抜けスペース16が設けられている。当該住宅10には、移動ロボット30が適用されており、移動ロボット30は各スペース11,12,16の床部13,14上を走行して特定の作業を行う。当該構成において、吹き抜けスペース16には昇降用軌道としてポール21が設けられており、移動ロボット30は当該ポール21を介して昇降することで各スペース11,12,16間を移動する。
(もっと読む)
1 - 20 / 43
[ Back to top ]