
Fターム[5H303CC06]の内容
Fターム[5H303CC06]の下位に属するFターム
摩擦に対するもの (36)
モーメント、負荷重量に対するもの (26)
バックラッシュに対するもの (9)
Fターム[5H303CC06]に分類される特許
1 - 20 / 67
アクチュエータの制御方法及びアクチュエータの制御装置
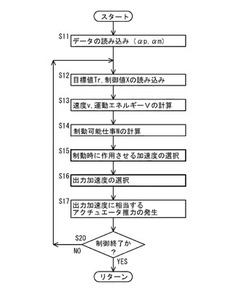
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置

【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
リソグラフィ装置およびステージシステム
【課題】正確なショートストローク位置決めを提供する。
【解決手段】ステージシステムは、オブジェクトを保持するオブジェクトテーブルと、第1の移動範囲にわたりオブジェクトテーブルを移動させるショートストロークアクチュエータ素子と、第1の移動範囲よりも大きい第2の移動範囲にわたりショートストロークアクチュエータ素子を移動させるロングストロークアクチュエータ素子と、を備える。ステージシステムは、ショートストロークアクチュエータ素子上の空気外乱力を表す量を測定するセンサと、空気外乱を少なくとも部分的に補償する補償力を提供するアクチュエータと、コントローラと、を有する空気式補償デバイスをさらに備える。センサはコントローラのコントローラ入力に接続され、アクチュエータはコントローラのコントローラ出力に接続される。コントローラは、センサから受け取る信号に応答してアクチュエータを駆動する。
(もっと読む)
発電装置および方法、並びにプログラム
【課題】発電をより適切に行うことができるようにする。
【解決手段】掃除機100の筺体は、側面102によって、八角形が形成される。その側面102の内側は、山型の形状をなしている。つまり、各上面101は、側面102側から中央に向かって高くなるような、互いに異なる方向を向く斜面として形成される。各上面101に設置される太陽電池ユニット111が、互いに異なる方向に向くので、光が一方向から照射されると、ユニット間で発電量に偏りが生じる。掃除機100は、各太陽電池ユニット111の発電量を比較することにより、どの方向から光が照射されているのか把握する。移動制御部151は、移動機能部171を制御して掃除機100の筺体を、光の照射方向に向かう方向に移動させる。本発明は、例えば、発電装置に適用することができる。
(もっと読む)
外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法
【課題】設計者が試行錯誤することなく決定した伝達関数に基づく位相進み補償器と位相遅れ補償器により、共振の位相を安定化させることが可能な外乱オブザーバ、フィードバック補償器、位置決め装置、露光装置、及び外乱オブザーバ設計方法を提供する。
【解決手段】
制御対象28に加わる外乱dを推定する外乱オブザーバ21において、外乱オブザーバ21は、制御対象28の共振成分を外乱dの一部として含んだ外乱モデルに基づいて相補感度関数のパラメータが設計されたことを特徴とする。
(もっと読む)
ロボット制御装置の補正パラメータ同定装置
【課題】減速機角度伝達誤差によるうねりを補正する。
【解決手段】ロボットの手先部に発生するうねりの振幅を求める手段と、複数の関節の所定の関節Jiに対応するうねりの振幅値Diを求める手段と、所定の関節Jiをモータの位置指令θrefiで単軸動作させた際に、関節の軸に現れる位置フィードバック信号Biを計測する手段と、関節Jiに対する位置指令値θrefiに振幅Cのうねりを重畳的に加え、更に、他の軸Jxに位置指令θrefxが加えたと仮定した場合に、手先位置において発生するうねりC’iを計算する手段と、Ai=(Ci/C’i)×Diという式に従って、Biに対応するAiを求める手段と複数のロボットに対して、以上の各手段を用いて、Biに対応するAiを求める手段とを備える、ロボット制御装置の補正パラメータ同定装置。
(もっと読む)
太陽光発電装置
【課題】対環境性能が高く最低限の発電量を確保して発電量の低下や変動を抑えることができるとともに、大電力を確保するために多数の太陽電池モジュールを設置する必要がある場合においてもコストを抑えることができる太陽光発電装置を提供する。
【解決手段】複数の太陽電池モジュールと、複数の太陽電池モジュールが設置された場所の環境条件を測定する環境測定装置5と、環境測定装置5により測定された環境条件に基づいて、複数の太陽電池モジュールの各々がなすべき目標仰角を算出する演算装置6と、演算装置6により算出された目標仰角に基づいて、複数の太陽電池モジュールの各々の仰角を制御する方向制御装置7とを備える。
(もっと読む)
並列スライダ装置の制御装置および制御方法および測定装置
【課題】並列スライダ装置において、二つのスライダが相互に干渉することなくスムーズな動きをもって移動することを実現すること。
【解決手段】
前側リニアサーボモータ72のための前側サーボコントローラ110と後側リニアサーボモータ80のための後側サーボコントローラ130とに互いに同一の位置指令を与える一方で、前側リニアサーボモータ72は比例要素と少なくとも積分要素と微分要素の何れか一方を含むPI制御あるいはPD制御あるいはPID制御を行い、後側サーボコントローラ130は比例要素のみを含むP制御を行い、前側サーボコントローラ110と後側サーボコントローラ130とで制御ゲインを互いに相違させる。
(もっと読む)
サーボ制御装置
【課題】送り機構のボールスクリューが経年変化や温度変化で伸縮してボールスクリューの軸方向に沿う剛性が変化しても、このような剛性変化を補償して、テーブルの位置を正確にサーボ制御する
【解決手段】制御部100は、サーボモータ40をフィードバック制御して、負荷であるテーブル02をサーボ制御する。逆特性モデル300は、機械系の動的誤差を補償する速度補償信号V300を求めて、フィードフォワード補償制御をする。剛性変化補償部400は、ボールスクリュー30のネジ部31の軸方向に沿う剛性が変化したら、この剛性変化に応じて、逆特性モデル300の補償制御用伝達関数に含まれているネジ部の軸方向に沿う剛性値を変化させる。
(もっと読む)
位置決め制御装置
【課題】減速機構軸の減速後軸の回転角度を検出する必要がある場合、角度検出器の選定は減速機構の構造、被回転体により左右される。その結果角度検出器の大型化、重量化により位置決め装置全体が高額となる。
【解決手段】減速機構2の減速前軸4の角度より減速後軸3の角度を推定計算するようにすることで、減速機構2、被回転体の構造に左右されずに角度検出器7を選定できるようになり、位置決め装置全体の軽量化、低価格化を実現することができる。
(もっと読む)
モータ回転制御システム
【課題】手動による煩わしさやミスの発生を無くして、制御手段の誤差データとモータユニットとを正しく適切に対応させるモータ回転制御システムを提供する。
【解決手段】モータ21と、このモータ21の回転角度を検出するレゾルバ22とを含むモータユニット2と、このモータユニット2に対して交換自在な状態で電気的に接続され、レゾルバ22により検出される検出角度と実角度との誤差データ24を用いてレゾルバIの検出角度から実角度を特定し、特定した実角度に基づいてモータ21の回転を制御する制御手段3とを具備してなり、モータユニット2は、誤差データ24を予め記憶するモータ側メモリ23を備え、制御手段3は、実角度の特定時に用いる誤差データ24を記憶する制御側メモリ35を備え、両メモリの記憶に基づいてモータ側メモリ23の誤差データ24を取り込んで、制御側メモリ35へ記憶する。
(もっと読む)
位置決め制御系の外乱非干渉化補償装置
【課題】いずれかの駆動体の加減速駆動により発生する外乱が機台を介して隣接する他の駆動体に伝達される装置において、隣接する駆動体から伝達される外乱による駆動体の位置決め精度の悪化の課題を、ソフトウエアの変更又は追加のみで解決できるようにする。
【解決手段】外乱の影響を受ける側の駆動体の観測量に対して外乱の非干渉化補償を行う外乱非干渉化補償器は、外乱発生側の駆動体の操作量ubを入力として、外乱の影響を受ける側の駆動体の観測量xlmに対する該外乱の非干渉化補償を行うためのフィードフォワード補償量ucを出力する第1のフィードフォワード補償器Fn1(s)と、外乱の影響を受ける側の駆動体の操作量Cl(s)の出力を第1のフィードフォワード補償器Fn1(s)の出力で補正する第1の演算器11とを備えている。
(もっと読む)
パラメータ推定装置
【課題】作業状況の変化によって生じるアクチュエータの制御パラメータの変化量を高精度で推定することができるパラメータ推定装置を提供する。
【解決手段】コントローラ6は、フィードバックループのゲインを測定するループゲイン測定手段23と、ループゲイン測定手段23により測定されたゲインが一定となるように該ゲインの調整値を決定するゲイン交点制御手段24と、ゲイン交点制御手段24により決定されたゲインの調整値から、アクチュエータ5の制御パラメータの規定値に対する変化量を推定するパラメータ推定手段28とを備える。
(もっと読む)
制御装置
【課題】 バイラテラル(マルチラテラル)方式による同期制御において、制御系の導出や調整を簡易化しつつ、同期精度を向上させることを目的としている。
【解決手段】 同期誤差が入力される第1学習フィルタ及び第2学習フィルタを含み、第1学習フィルタの出力にもとづいて第1の制御対象に制御入力をフィードフォワードし、第2学習フィルタの出力にもとづいて第2の制御対象に制御入力をフィードフォワードする反復学習制御回路とを備える。さらに、第1学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含み、第2学習フィルタは、第1及び第2の制御対象の伝達関数と、第1及び第2の制御回路の制御器の伝達関数を含む。
(もっと読む)
駆動制御装置
【課題】運動伝達機構の経年劣化等を原因として、運動伝達率の値が変動した場合には、実際の運動伝達率に合わせて設定パラメータの値を変更することができると共に、設備の更新や部品交換等により、運動伝達機構が当初の運動伝達率を回復した場合には、直ちに、設定パラメータの値を初期状態へと簡単に復帰させる。
【解決手段】メモリの設定パラメータ格納領域には、運動伝達機構の初期状態及び経年状態に対応する運動伝達率に対応する単位変換比率の生成に必要な設定パラメータを格納するための第1及び第2の設定パラメータ格納領域が設けられ、それらの領域に格納された設定パラメータを参照することにより、所定の単位変換演算式にしたがって、標準単位系から駆動単位系へと単位変換を行う。
(もっと読む)
制御装置
【課題】二重ジンバル機構においてインナージンバルとアウタージンバルの駆動制御を行う制御装置に関し、アウタージンバルとインナージンバル間の衝突や視軸変動の発生を抑止する。
【解決手段】アウタージンバルとインナージンバルを有する二重多軸ジンバルの駆動制御を行う制御装置であって、ジョイスティク51からのアウター用基準指令値とアウター速度センサ24の出力値との偏差であるアウター偏差値に基づきアウタージンバルを駆動制御するアウター制御部60Aと、中心角度指令値とインナー角度センサ36の出力値との偏差であるインナー偏差値とに基づきインナージンバルを駆動制御するインナー制御部70Aと、ジョイスティク51から指向操作によりアウター用基準指令値が入力されている時、前記インナー偏差値をアウター制御部60Aに反映させる補正手段(差角指令補償器82,加算器83)を設ける。
(もっと読む)
サーボ制御装置
【課題】工作機械等に適用するサーボ制御装置において、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制する。
【解決手段】制御回路20,30と電流制御部3とサーボモータ1と送り機構10とテーブル2を含むサーボ制御系Iの周波数特性を測定する。しかも、テーブル2の移動範囲を多数に区分した各区間に対応して周波数特性を測定する。この周波数特性と逆特性となっている逆周波数特性を、各区間毎に求める。そして、実作業時には、テーブル2が位置している区間に対応した逆周波数特性をディジタルフィルタ121に設定する。そうすると、ディジタルフィルタ121とサーボ制御系Iを合わせた伝達関数が1となり、送り機構や機械要素で発生する捩れや撓みに起因する遅れや振動を抑制することができる。
(もっと読む)
モータ制御装置
【課題】 モータを駆動する場合に機械系に発生する機械共振の抑制機能を向上させる。
【解決手段】 モータ1の速度を検出する検出器2と、該検出器からの速度検出値とモータの速度指令値ωsとの差を演算する演算器5と、前記差に基づいてモータのトルク指令値を生成する速度制御手段6と、前記トルク指令値に応じてモータを制御するトルク制御手段8を含む閉ループ制御系を備えたモータ制御装置に適用される。更に、モータを加振させる信号を発生するための信号発生器12と、前記信号を前記トルク指令値に重畳する加算器13と、第1、第2のノッチフィルタ7、10とこれらの係数を修正してノッチ周波数を更新する調整器11を含む適応ノッチフィルタとを備え、前記調整器は、前記ノッチ周波数の更新結果に応じてスイッチ14をオン、オフして前記加算器への前記信号の供給をオン、オフする。
(もっと読む)
二次元型テーブル微小角度駆動機構の制御ループ
【課題】従来の二次元型テーブル微小角度駆動機構の制御ループは、第1〜第4ヒンジの共振が考慮されていないので、第1〜第4ヒンジの共振によって駆動誤差が生じる。
【解決手段】本発明による二次元型テーブル微小角度駆動機構の制御ループは、第2減算部300と第2乗算部400との間に介在され、第1補償乗算部810、第1積分部820、第2補償乗算部830、第2積分部840、及び加算部850から構成される補償演算手段800によって、機構部700の共振周波数ω0とダンピング比ζとを用いた補正角速度偏差850aが生成される構成である。
(もっと読む)
アクチュエータおよび制御方法
【課題】複動型シリンダを有するアクチュエータの動作を安定させる。
【解決手段】中空のシリンダと、シリンダに収容されて、シリンダと共に一対の圧力室を形成しつつ、シリンダに対して相対移動するピストンと、一対の圧力室の各々を、作動流体の圧力源または排出部に対して連通または遮断させる一対の制御弁と、シリンダに対するピストンの位置を検出する位置検出器と、一対の圧力室の各々における作動流体の圧力を個別に検出する一対の圧力検出器と、位置検出器が検出する位置が所与の目標位置に近づき、且つ、圧力検出器が検出する圧力の平均が所与の目標圧力に近づくように、制御弁を制御する制御部とを備える。
(もっと読む)
1 - 20 / 67
[ Back to top ]