
Fターム[5H303EE01]の内容
位置、方向の制御 (6,897) | 位置の設定内容、設定方法、設定手段 (374) | 手動による設定 (30)
Fターム[5H303EE01]に分類される特許
1 - 20 / 30
アクチュエータの制御方法及びアクチュエータの制御装置
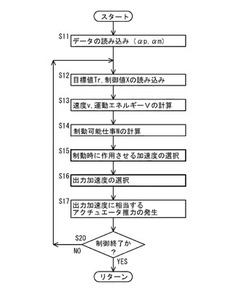
【課題】車両燃費改善のため車両のエネルギーを有効に活用するための機構及びその制御方法で、PID制御に代わる新たな制御手法として、より簡便な方法で制御結果が得られるアクチュエータの制御方法及びアクチュエータの制御装置を提供する。
【解決手段】制御対象の運動エネルギーと制動可能仕事を比較し、前記制御対象の運動エネルギーと前記制動可能仕事が等しくなった時点で駆動から制動に切り替えると共に、前記制御対象の運動エネルギーと前記制動可能仕事の比較を予め設定した時刻毎に繰り返し行う「エネルギー評価制御」を行う。
(もっと読む)
位置決め装置

【課題】外部からの入力信号により、モータの回転位置を目標の位置に到達するまで移動して停止するのに好適な位置決め装置を提供する。
【解決手段】従来の位置決め装置にタイマカウンタラッチ処理部31と比率計算部32とを付加し、外部からの入力信号が発せられると、タイマカウンタのカウンタ値をラッチし、新たなサンプル信号が発せられると、このときのタイマカウンタのカウンタ値をラッチするとともに、比率計算部32ではこれらの値と、このときモータ位置演算部13が出力したモータ1の出力軸の回転位置の今回値,前回値と、サンプル信号の周期のカウント値とに基づく比率計算を行い、ラッチタイミングモータ位置とする。この値と移動量設定部14の出力値との加算演算をした値をモータ1の回転軸の位置決め目標値とし、モータ1の回転軸は、前記入力信号が発せられたタイミングの位置を起点として、移動量設定部14の出力値だけ移動して停止する。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
送り装置
【課題】サーボロック時の消費電力を削減することができる送り装置を提供する。
【解決手段】送り装置1は、ボールねじ21,ナット23,駆動モータ24,ブレーキ機構25及び制御装置50を備え、移動体13を上下方向に移動させる。制御装置50は、移動体13に関する早送りの移動指令を認識すると、移動体13を現在位置から上方向に移動させる場合には、早送りの移動指令に係る目標移動位置を越えて移動体13を移動させた後、移動方向を反転させて目標移動位置に移動体13を移動,停止させる一方、現在位置から下方向に移動させる場合には、移動体13を目標移動位置に直接移動,停止させるとともに、移動体13を目標移動位置に移動,停止させた後、駆動モータ24によって移動体13の位置を停止位置に維持し、且つブレーキ機構25によって移動体13の移動を制動する。
(もっと読む)
位置制御装置および位置制御方法
【課題】距離に依存せずに高い精度で位置制御が可能な位置制御装置を提供する。
【解決手段】位置制御装置100は、第1情報を取得し、前記第1情報から特定される基準位置Bとステージ1との間の距離と所望の距離との差が、所与の範囲に含まれるか否かを判定し、前記所与の範囲に含まれない場合には、前記差が前記所与の範囲に含まれるようにステージ1の位置を制御する第1位置制御処理を行う第1制御手段31と、前記差が前記所与の範囲に含まれる場合には、前記第2情報を取得し、前記第2情報から特定される基準位置1とステージBとの間の距離に基づいて、基準位置Bとステージ1との間の距離が前記所望の距離となるようにステージ1の位置を制御する第2位置制御処理を行う第2制御手段32と、を含む。
(もっと読む)
数値制御装置及び数値制御方法
【課題】移動量及び動作を開始して終了するまでの時間の入力を受け付けることにより、自動的に移動軌跡データ及び速度データを生成して工作機械の動作を制御することができる数値制御装置及び数値制御方法を提供する。
【解決手段】移動量データ及び移動時間データの入力を受け付け、入力を受け付けた移動量データ及び移動時間データに基づいて、制御対象の移動軌跡を示す移動軌跡データ及び速度の変化を示す速度データを生成する。生成した移動軌跡データ及び速度データに基づいて、工作機械の各軸を駆動するサーボモータの動作を制御するサーボデータを出力する。
(もっと読む)
ボールねじ装置の駆動制御装置及び駆動制御方法
【課題】 ボールねじ装置の共振を良好に抑制する。
【解決手段】 ボールねじ装置は、ボールねじを回転させて移動体を移動させるためのモータ11を備えている。モータ11は、駆動制御装置により駆動制御される。駆動制御装置は、ボールねじの長さに応じてボールねじの長さに固有のボールねじ装置の共振周波数を決定する共振周波数決定部33と、モータ11を駆動制御するための駆動制御信号から決定された共振周波数に対応した周波数成分を除去するフィルタ部37とを備えている。
(もっと読む)
補正用治具
【課題】レーザ測長機等の高度な装置や複雑な手間を要することなく、しかも部品実装装置のX軸およびY軸の座標の補正を行う補正用治具を提供する。
【解決手段】マウントヘッドをX軸方向およびY軸方向に移動させて目標位置に部品を実装する部品実装装置の、X軸方向およびY軸方向の移動の補正値を求めるための補正用治具75であって、部品実装装置のX軸およびY軸にそれぞれ沿って配置される辺を有する矩形状の表面を有するガラスからなる本体部と、表面に形成され、マウントヘッドに搭載されたカメラでそれぞれ認識される、本体部の辺に沿ってX軸方向およびY軸方向にそれぞれ1列で配置された複数の観測点77,78と、を含み、表面内で1列に配置された複数の観測点77,78よりも内側の領域には他の観測点が設けられていない。
(もっと読む)
情報処理装置、位置制御方法、プログラムおよび記録媒体
【課題】 ポインティング・デバイスを用いて、顕微鏡システムにおけるステージなどの操作対象を位置制御する情報処理装置、位置制御方法、プログラムおよび記録媒体を提供すること。
【解決手段】 本発明の情報処理装置110は、ポインティング・デバイス114により指し示される操作画面上の座標値を取得する手段172と、この座標値から操作対象の位置の目標値を算出する手段174と、操作対象の位置の目標値と現在値との差分を算出する手段176と、座標値の取得時間間隔内に操作対象を差分だけ移動させるために必要な速度から、予め設定された平滑化係数に応じて減速した値として、操作対象を駆動する同期モータのパルススピードの目標値を算出する手段180と、差分が有り、かつ、順方向の駆動信号が出力されている場合に、算出されたパルススピードの目標値を設定し、このパルススピードの目標値に向けた加減速制御を指令する手段184とを含む。
(もっと読む)
長尺重量物のアライメント支援方法、長尺重量物のアライメント支援システム
【課題】長尺重量物のアライメント容易に行うことが可能な長尺重量物の位置合せ支援方法、およびアライメント支援システムを提供する。
【解決手段】建屋座標系Oで目標位置が定められた長尺重量物のアライメント支援システムであって、前記長尺重量物である電磁石12に固定され、前記目標位置が設定された計測用ターゲット26と、前記電磁石12に配設され、前記長尺重量物を所定の調整軸方向に移動させてアライメントを行う調整機構14と、前記計測用ターゲット26の現在位置を測定して現在位置のデータを出力する計測装置16と、前記現在位置のデータが入力され、前記現在位置のデータと前記目標位置のデータとの偏差を前記計測用ターゲットによって形成される平面を基準として構成された座標軸によるローカル座標系Lに変換する演算手段18と、を有してなる。
(もっと読む)
制御装置
【課題】二重ジンバル機構においてインナージンバルとアウタージンバルの駆動制御を行う制御装置に関し、アウタージンバルとインナージンバル間の衝突や視軸変動の発生を抑止する。
【解決手段】アウタージンバルとインナージンバルを有する二重多軸ジンバルの駆動制御を行う制御装置であって、ジョイスティク51からのアウター用基準指令値とアウター速度センサ24の出力値との偏差であるアウター偏差値に基づきアウタージンバルを駆動制御するアウター制御部60Aと、中心角度指令値とインナー角度センサ36の出力値との偏差であるインナー偏差値とに基づきインナージンバルを駆動制御するインナー制御部70Aと、ジョイスティク51から指向操作によりアウター用基準指令値が入力されている時、前記インナー偏差値をアウター制御部60Aに反映させる補正手段(差角指令補償器82,加算器83)を設ける。
(もっと読む)
機械制御装置
【課題】 先端に重量物が取り付けられた長尺のアームを移動させる場合でも、振動を伴うこともなく目標位置に停止させる機械制御装置を提供する。
【解決手段】 機械制御装置40には、調節動作の際の比例ゲインが可変構造の位置調節器41を備え、さらに、この機械制御装置40には位置指令ブロック24の出力である位置指令値に基づいて、位置調節器41の比例ゲインを可変する指令を送出する比例ゲイン設定手段42を備えている。
この比例ゲイン設定手段42では、位置指令ブロック24からの位置指令値に基づく移動速度が遅いとき、すなわち、移動距離が短い位置指令値のときには位置調節器41の比例ゲインを大きく設定し、前記位置指令値に基づく前記移動速度が速いとき、すなわち、移動距離が長い位置指令値のときには前記比例ゲインを小さく設定するようにしている。
(もっと読む)
制御データ発生装置
【課題】自動操作と手動操作が可能な操作子において、自動位置決め完了時の実位置と目標位置との誤差を、その後の手動操作に際して実効的に解消し、違和感のない制御データを発生する。
【解決手段】通常は所定のスケール特性に従う制御データを位置データに応じて発生する。操作子が目標位置Ptに自動位置決めされた直後の手動操作において変更スケール特性を適用する。変更スケール特性においては、位置決め完了時における実位置Prに対応して前記所定のスケール特性上の目標位置Ptに対応する制御データDtが出力されるように起点を設定し、該起点の位置から少なくとも目標位置に達するまでの区間を含む第1の変更区間を設定し、位置検出器12で検出された位置データに対応して発生される制御データが、起点に対応する制御データDtから該第1の変更区間の終点の位置に対応する前記所定のスケール特性上の制御データまで漸次変化するようにする。
(もっと読む)
位置制御装置
【課題】可動部材の移動が規制されないように可動範囲の両端部に適切にロック検出エリアを設定することが可能な位置制御装置を提供する。
【解決手段】位置制御装置1は、モータにより駆動される可動部材が機械的にロック状態となる両端部のロック位置に対して、可動範囲の側に設定されたロック検出エリア内からロック位置方向への移動が規制される位置制御装置1は、ロック位置の位置情報をロック位置情報として記憶するロック位置情報記憶部78と、ロック位置に対して、少なくとも可動範囲の側にロック検出エリアを設定するロック検出エリア設定部81と、ロック検出エリアの設定時に、両端部のロック位置の間の距離が予め設定された所定量未満である場合に、先に設定されたロック検出エリアを消去するロック検出エリア消去部83と、を備える。
(もっと読む)
位置制御装置
【課題】リップルパルスに基づいて演算された位置と実際の位置との間のずれを適切に補正することが可能な位置制御装置を提供する。
【解決手段】位置制御装置1は、可動部材の現在位置情報をリップルパルスに基づき演算する現在位置情報演算部77と、可動部材が機械的にロック状態となる端部の位置情報をロック位置情報として記憶しているロック位置情報記憶部78と、端部に対して可動範囲の側と可動範囲から外れた側とに設定されたロック検出エリアを記憶しているロック検出エリア記憶部82と、可動部材が移動して停止した時に現在位置情報により示される現在位置がロック検出エリア外から動き始め、可動範囲から外れた側のロック検出エリアで停止した場合にロック位置情報で現在位置情報を更新する現在位置情報更新部75とを備える。
(もっと読む)
位置制御装置
【課題】リップルパルスに基づいて演算された位置と実際の位置との間のずれを適切に補正することが可能な位置制御装置を提供する。
【解決手段】位置制御装置1は、モータにより駆動される可動部材の現在位置を示す現在位置情報を、リップルパルスに基づいて演算する現在位置情報演算部77と、可動部材が機械的にロック状態となる端部の位置情報をロック位置情報として記憶しているロック位置情報記憶部78と、端部に対して、少なくとも可動範囲の側に設定されたロック検出エリアを記憶するロック検出エリア記憶部82と、可動部材が、可動範囲の側のロック検出エリアから動き始めて端部の反対側へ向かう場合に、可動部材がロック検出エリア内で停止することを禁止し、可動部材をロック検出エリア外まで移動させる停止位置補正制御部84とを備える。
(もっと読む)
操作方法および操作装置
【課題】動作範囲が異なるジョイスティックとモバイルロボットとの間で力覚フィードバックを得ながらの操作を可能とする。
【解決手段】動作範囲が異なるジョイスティック10とモバイルロボット11とを用い、ジョイスティック10によりモバイルロボット11を操作する。モバイルロボット11の移動中に、当該モバイルロボット11が受ける時系列な力の触覚情報を取得し、取得した前記触覚情報を時間領域で解析処理し、解析処理結果からの接触情報をジョイスティック10にフィードバックするから、力覚フィードバックを得ながら操作を行うことができ、動作範囲の異なるジョイスティック10とモバイルロボット11との間で、直感的な操作が可能となる。
(もっと読む)
位置決め制御システム
【課題】従来のビルの清掃作業手法に比べ、清掃用ゴンドラを上下駆動できる装置を簡単に設置することができ、しかも、作業が終了すれば簡単に撤去することができ、さらに、清掃用作業員が効率的に清掃作業を行うことができ、そして、安全で、安価に提供できる位置決め制御システムを提供することを目的としている。
【解決手段】位置決め制御システムは、夫々モータ3で回転駆動される複数のプーリー6と、該各プーリー6に夫々巻回されてなる索体7と、該各プーリー6に巻回されてなる少なくとも2本の索体7を使用して上方向に支持されてなる作業装置12と、前記各モータ3の回転駆動を夫々制御するモータ制御装置2と、前記各モータ制御装置2に前記モータ3の回転駆動量を指令する制御装置1とからなるものとしている。
(もっと読む)
位置決めテーブル、位置決めクランプ装置、及びメインボディ用位置決め装置。
【課題】多段階の位置決めが可能であり、故障や停電等の電気系統のトラブルが発生した際の復旧が極めて容易な汎用位置決めテーブルを提供する。
【解決手段】汎用位置決めテーブル1は、一方向に摺動可能なテーブル11と、当該一方向と平行をなす軸を中心に回転可能なシャフト131と、シャフト131の側面上に設けられた、摺動するテーブル11を停止させるための複数のストッパ132と、を備えている。ここで、摺動するテーブル11は、複数のストッパ132のうちシャフト131の回転により切り替え可能な一のストッパ132に当接することで停止させられる。
(もっと読む)
流体船積みおよび/または荷降ろしシステム用の直接制御、特に比例制御および/または直線的制御式装置
本発明は、海洋船積みシステム(2)用の結合器の動きと位置決めのための制御装置に関する。前記海洋船積みシステムは、ベースに固定されているライン端部を有する少なくとも1つの流体移送ラインと、目標ダクトへの接続用に適合されている結合器が設けられている可動ライン端部とを備え、前記システムは、ベースに対して少なくとも3自由度を結合器が有するように、複数の機械的接続部を更に有しており、制御装置は、それぞれが自由度においてシステムの動きを比例的に制御する少なくとも3つの比例式制御アクチュエータ(27、28、29)と、各自由度を追尾するシステムの位置センサ(30、31、32)と、結合器を動かすコマンドを入力するためのコマンド入力インタフェース(60)と、結合器の瞬間的位置を、センサから提供される情報から計算し、コマンド入力インタフェースの動きコマンド入力から、アクチュエータの組み合わされた動きが、コマンド入力インタフェースにおいてオペレータにより提供される動きコマンドに対応する結合器の動きとなるように、アクチュエータのそれぞれに与える同時制御指令を計算する計算機(41)と、を備える。 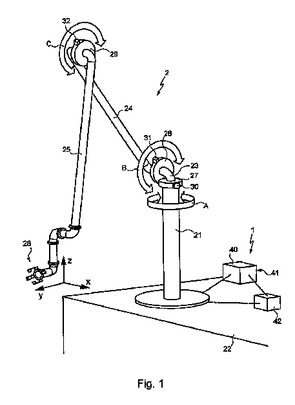 (もっと読む)
(もっと読む)
1 - 20 / 30
[ Back to top ]